2024年自动驾驶轨迹预测方向的论文汇总
1、producing and leveraging online map uncertainty in trajectory prediction
论文地址:https://arxiv.org/pdf/2403.16439
提出针对在线地图不确定性带给轨迹预测的影响对应的解决方案。
在轨迹预测中,利用在线地图不确定性是一个重要的课题。随着位置数据的增加和地图更新的频率加快,准确地处理这些不确定性变得至关重要。以下是一些关键步骤:
- 收集数据:首先,需要收集大量的位置数据,并确保这些数据来自可靠的来源。
- 构建地图模型:使用收集到的数据来构建地图模型。这可能涉及到使用机器学习算法来识别模式并生成预测。
- 处理不确定性:考虑到地图更新的频率,必须考虑如何处理不确定性。一种方法是使用概率分布来表示每个位置点的不确定性。
- 集成实时更新:为了保持准确性,需要将实时更新集成到模型中。这可以通过定期更新地图模型来实现。
- 评估性能:最后,对模型进行评估以确保其在实际应用中的有效性。可以使用各种指标来衡量模型的性能,例如平均绝对误差(mae)或均方根误差(rmse)。
通过这些步骤,我们可以有效地利用在线地图的不确定性来提高轨迹预测的准确性。
2、cadet: a causal disentanglement approach for robust trajectory prediction in autonomous driving
论文:https://openaccess.thecvf.com/content/cvpr2024/papers/pourkeshavarz_cadet_a_causal_disentanglement_approach_for_robust_trajectory_prediction_in_cvpr_2024_paper.pdf
cadet的核心思想是通过因果分解来分离出环境因素对轨迹预测的影响,并将其从预测模型中剔除从而训练一个自动适应新环境的轨迹预测模型。
实验数据集:av2,无代码公开
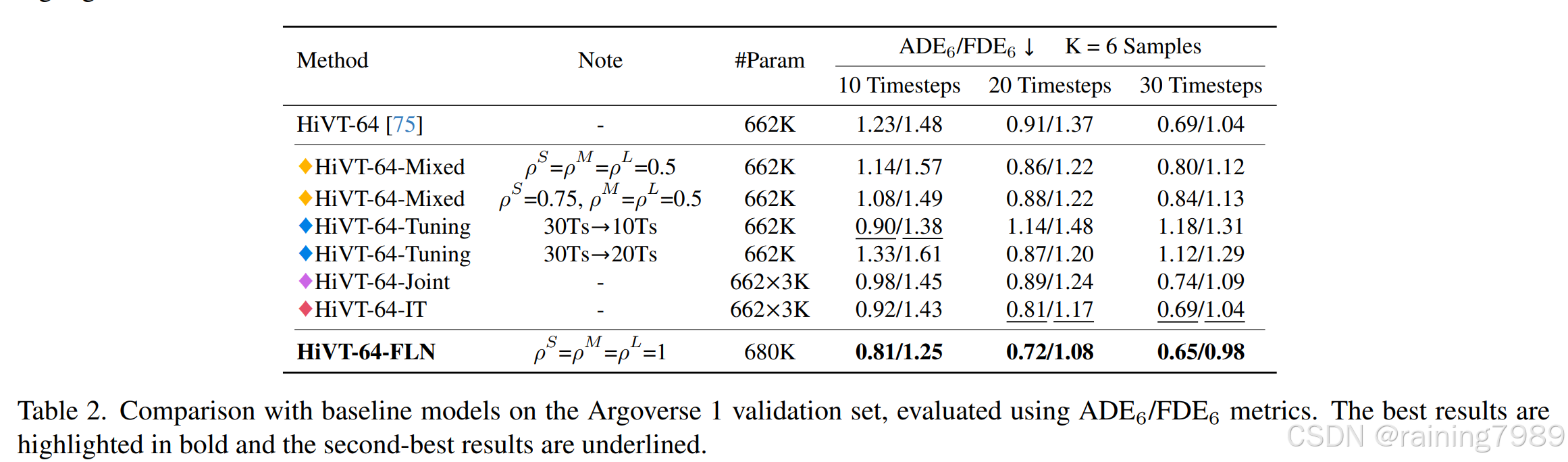
3、adapting to length shift: flexilength network for trajectory prediction
论文:https://arxiv.org/pdf/2404.00742
篇论文主要关注的是如何解决轨迹预测任务中长度变化的问题,通过引入一个长度控制模块来实现的,该模块可以根据输入轨迹的长度动态地生成一个长度向量,用于指导后续的预测过程。
数据集:nuscenes, av1,base model:hivt,下图为hivt使用了他的方案后的涨点:
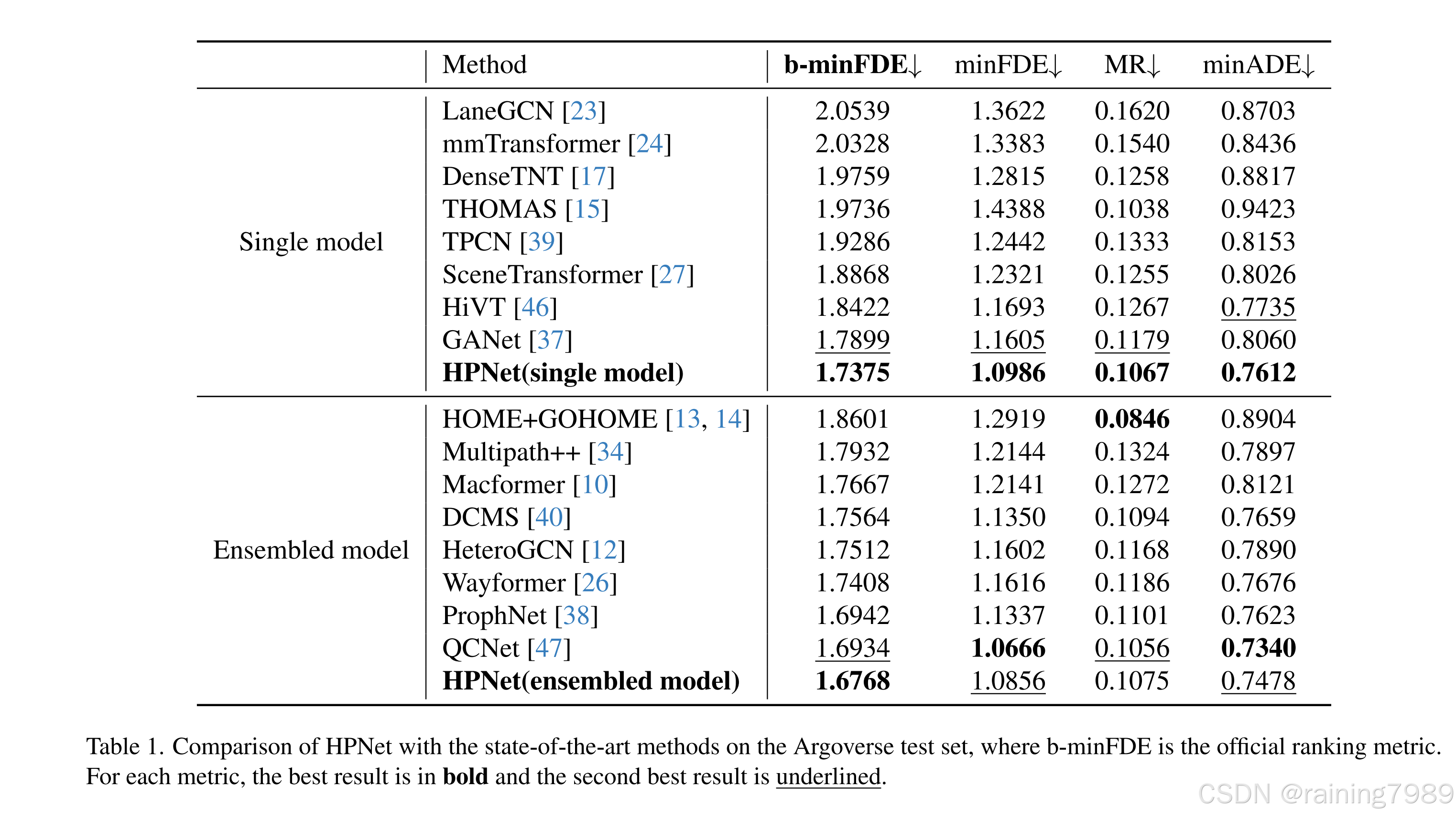
4、hpnet: dynamic trajectory forecasting with historical prediction attention
论文地址:https://arxiv.org/pdf/2404.06351
代码地址:https://github.com/xiaolongtang23/hpnet
该论文介绍了一种名为 hpnet 的新方法,它利用历史预测注意力来提高轨迹预测的准确性。传统的轨迹预测模型通常只考虑当前时刻的环境信息,而忽视了之前预测的历史信息。然而,hpnet 引入了一个历史预测注意力机制,使得模型能够更好地利用先前的预测结果来指导后续的预测过程。
具体来说,hpnet 包含以下几个关键步骤:首先,需要收集大量的位置数据,并确保这些数据来自可靠的来源。其次使用收集到的数据来训练一个能够产生更准确预测的模型。在这个过程中,引入历史预测注意力机制。
然后使用历史预测注意力机制来训练模型,使其能够更好地利用先前的预测结果来指导后续的预测过程。最后,对模型进行评估以确保其在实际应用中的有效性。可以使用各种指标来衡量模型的性能,例如平均绝对误差(mae)或均方根误差(rmse)。通过这些步骤,hpnet 提供了一种新的方法来提高动态轨迹预测的准确性和鲁棒性。
实验数据集:argoverse1
代码地址:https://github.com/xiaolongtang23/hpnet
论文地址:https://arxiv.org/pdf/2404.06351
实验结果:数据集:av1
5、damm:density-adaptive model based on motif matrix for multi-agent trajectory prediction
技术文档:https://openaccess.thecvf.com/content/cvpr2024/supplemental/wen_density-adaptive_model_based_cvpr_2024_supplemental.pdf
实验数据集:nuscenes argoverse
这篇论文主要探讨如何通过基于模式矩阵的密度自适应模型来实现多代理轨迹预测,模式矩阵是一种用于表示道路用户之间相互作用关系的数据结构, 它能够捕捉到不同道路用户之间的复杂交互行为,例如跟随、并行行驶等。dam能够根据当前场景中的道路用户密度动态调整其内部参数,从而提高预测准确性。
6、matrix: multi-agent trajectory generation with diverse contexts
轨迹生成方向相关。该论文的主要思想是提出一种新的方法来生成具有丰富上下文信息的多智能体轨迹。
论文地址:https://arxiv.org/pdf/2403.06041v1
7、seneva:quantifying uncertainty in motion prediction with variational bayesian mixture
论文地址:https://arxiv.org/pdf/2404.03789
是一篇关于运动预测中不确定性度量的论文。该论文的主要思想是提出了一种基于变分贝叶斯混合模型(variational bayesian mixture, vbm)的方法来量化运动预测中的不确定性。传统的运动预测方法往往假设预测结果是确定性的,即预测结果只有一个确定的值。然而,在实际应用中,我们经常需要面对各种不确定因素,比如传感器噪声、模型误差等,这些都会导致预测结果存在一定的不确定性。因此,准确地量化并表达这种不确定性对于运动预测系统的可靠性和安全性至关重要。
论文中提出的 vbm 方法通过引入贝叶斯统计学的思想,将预测结果视为由多个潜在状态组成的混合分布。每个潜在状态对应着一种可能的运动模式,而混合系数则反映了不同模式的概率大小。这样,我们就可以通过计算混合系数来衡量预测结果的不确定性。
具体来说,vbm 方法首先构建了一个包含多个潜在状态的混合模型,然后利用变分贝叶斯技术对模型参数进行优化。优化过程中,不仅考虑了数据的似然函数,还考虑了模型的复杂度惩罚项,以避免过度拟合。最终,通过分析混合系数的分布情况,我们可以得到一个概率分布图,直观地展示出预测结果的不确定性。
实验结果在多个数据集上验证(包括av2),效果优于densetnt,forecast-mae
8、continual learning for motion prediction model via meta-representation learning and optimal memory buffer retention strategy
论文地址:https://openaccess.thecvf.com/content/cvpr2024/papers/kang_continual_learning_for_motion_prediction_model_via_meta-representation_learning_and_cvpr_2024_paper.pdf
实验数据集:nuscenes
该论文的主要思想是提出了一种结合元表示学习和最优记忆缓冲区保留策略的连续学习方法。
传统的运动预测模型通常假设训练数据集是静态不变的,然而在现实世界中,我们经常需要处理不断变化的数据流。这就要求我们的模型能够适应新的数据分布,同时保持对之前数据的有效记忆。因此,我们需要引入连续学习的概念,即在模型训练过程中,允许新数据的加入并更新模型参数,同时保留对之前数据的记忆。
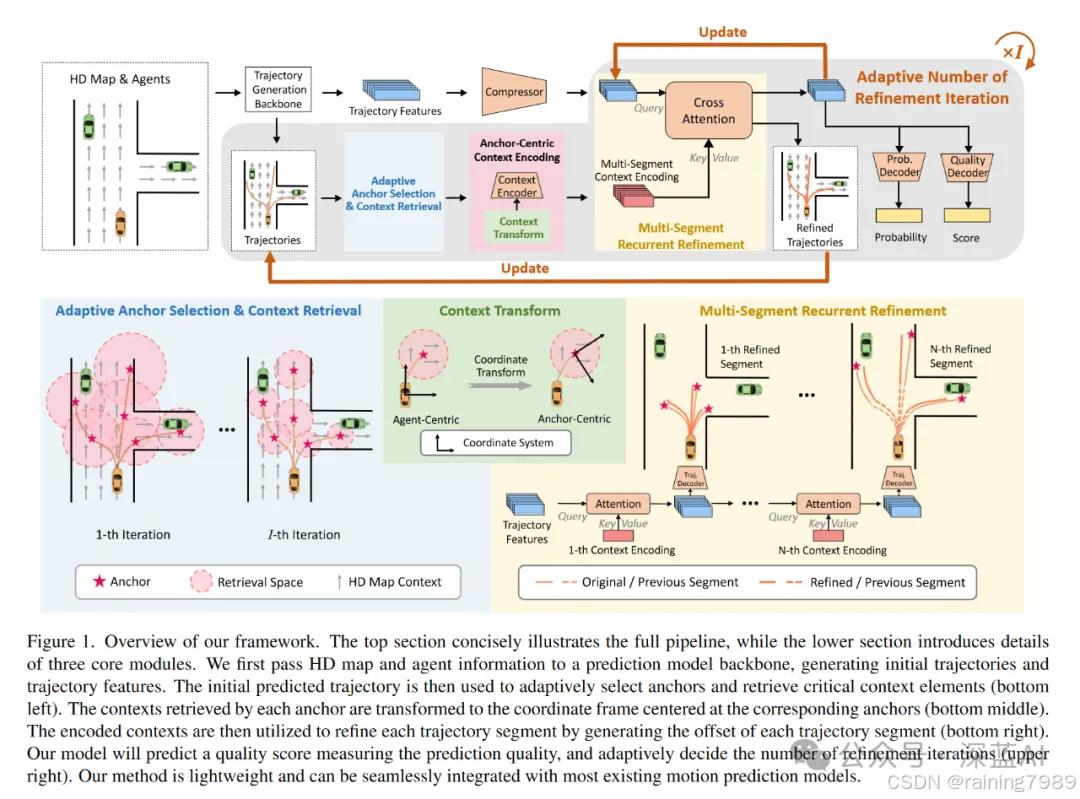
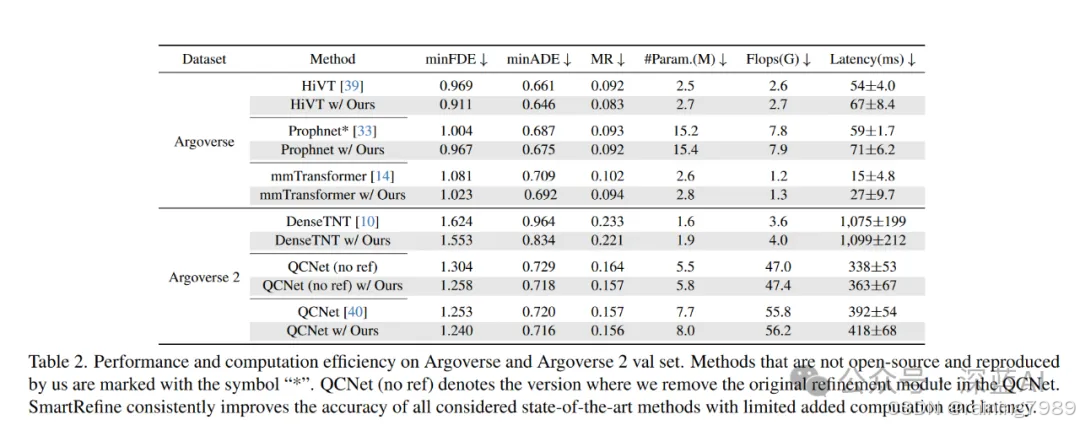
9、smartrefine: a scenario-adaptive refinement framework for efficient motion prediction
论文:https://arxiv.org/pdf/2403.11492
代码:https://github.com/opendilab/smartrefine/
论文解读:论文解读
该论文的主要思想是提出了一种场景自适应的精炼框架,通过分析当前的传感器数据或者历史数据,对当前所处的场景进行识别,针对不同的场景,选择最适合的预测策略,对于每个场景,采用不同的精炼算法来进一步优化预测结果。这些算法可以包括但不限于卡尔曼滤波、粒子滤波等,为了持续改进预测性能,论文还提出了一种反馈机制。即当新的数据到来时,不仅会更新当前的预测结果,还会将这些新数据加入到训练集中,用于后续的场景识别和策略选择。
模型框架:
实验结果:
10、generalized predictive model for autonomous driving 框架级别 目前线上预测架构设计可以关注
论文:https://arxiv.org/pdf/2403.09630
数据集:kitti,waymo, nuscenes
该论文的主要思想是提出了一种通用的预测模型,旨在为自动驾驶系统提供更准确、可靠的预测能力。前期数据预处理,然后进入模型选择与训练:根据具体的预测任务,选择合适的预测模型进行训练。这些模型可以包括但不限于回归模型、分类模型、强化学习模型等。
集成学习:为了进一步提高预测性能,论文还提出了一种集成学习的方法。即将多个不同的预测模型组合起来,形成一个更为强大的整体模型。
11、self-supervised class-agnostic motion prediction with spatial and temporal consistency regularizations
论文地址:https://arxiv.org/pdf/2403.13261
无监督的方法,可解决标注数据没有或者很少的问题.
数据集:nuscenes
该论文的主要思想是提出了一种无监督的、类别的泛化能力更强的运动预测方法,并且通过空间和时间一致性正则化来进一步提升预测精度。
数据增强:首先,通过对原始数据进行随机变换(如旋转、平移、缩放等),生成一系列的伪标签数据。
预测模型训练:然后,使用这些伪标签数据来训练一个运动预测模型。值得注意的是,这里的预测模型并不直接预测车辆的具体类别(如汽车、自行车等),而是预测车辆的运动状态(如位置、速度等)。
空间一致性正则化:为了保证预测结果在空间上的连续性,论文引入了空间一致性正则化。简单来说,就是要求相邻时刻的预测结果在空间上应该尽可能接近。
时间一致性正则化:同样地,为了保证预测结果在时间上的连续性,论文还引入了时间一致性正则化。即要求相邻时刻的预测结果在时间上也应该尽可能接近。
预测结果评估:最后,通过一些标准的评估指标(如均方误差、平均绝对误差等)来评估预测结果的质量。
12、most: multi-modality scene tokenization for motion prediction
论文:https://arxiv.org/pdf/2404.1953
端到端的,场景分块,运动预测,效果优于multipath++, mtr, 数据集:womd
该论文介绍了一种名为 most 的新方法,用于运动预测。
传统的运动预测模型往往只关注单个传感器的数据,而忽略了其他可用的信息源。most 则引入了多模态场景分割的概念,将来自多个传感器的数据整合起来,从而提高了预测的准确性。具体来说,most 包含以下几个关键步骤:
- 数据收集:首先,需要收集多种类型的传感器数据,例如摄像头图像、雷达点云等。
- 建立模型:使用收集到的数据来训练一个能够产生更准确预测的模型。在这个过程中,引入多模态场景分割的概念。
- 训练模型:使用多模态场景分割的概念来训练模型,使其能够更好地利用来自多个传感器的数据来指导运动预测。
-评估性能:最后,对模型进行评估以确保其在实际应用中的有效性。可以使用各种指标来衡量模型的性能,例如平均绝对误差(mae)或均方根误差(rmse)。
通过这些步骤,most 提供了一种新的方法来提高运动预测的准确性和鲁棒性。



发表评论