本文是对学习笔记之——3d gaussian splatting源码解读的补充,并订正了一些错误。
目录
- 三、相机相关
- 四、前向传播(渲染):`submodules/diff-gaussian-rasterization/cuda_rasterizer/forward.cu`
- 预备知识:cuda编程基础
- `def render(viewpoint_camera, pc : gaussianmodel, pipe, bg_color : torch.tensor, scaling_modifier = 1.0, override_color = none)`
- cuda文件`rasterizer_impl.cu`: `submodules/diff-gaussian-rasterization/cuda_rasterizer`
- cuda文件`forward.cu`: `submodules/diff-gaussian-rasterization/cuda_rasterizer`
三、相机相关
scene/cameras.py:class camera
class camera(nn.module):
def __init__(self, colmap_id, r, t, fovx, fovy, image, gt_alpha_mask,
image_name, uid,
trans=np.array([0.0, 0.0, 0.0]), scale=1.0, data_device = "cuda"
):
super(camera, self).__init__()
self.uid = uid
self.colmap_id = colmap_id
self.r = r # 旋转矩阵
self.t = t # 平移向量
self.fovx = fovx # x方向视场角
self.fovy = fovy # y方向视场角
self.image_name = image_name
try:
self.data_device = torch.device(data_device)
except exception as e:
print(e)
print(f"[warning] custom device {data_device} failed, fallback to default cuda device" )
self.data_device = torch.device("cuda")
self.original_image = image.clamp(0.0, 1.0).to(self.data_device) # 原始图像
self.image_width = self.original_image.shape[2] # 图像宽度
self.image_height = self.original_image.shape[1] # 图像高度
if gt_alpha_mask is not none:
self.original_image *= gt_alpha_mask.to(self.data_device)
else:
self.original_image *= torch.ones((1, self.image_height, self.image_width), device=self.data_device)
# 距离相机平面znear和zfar之间且在视锥内的物体才会被渲染
self.zfar = 100.0 # 最远能看到多远
self.znear = 0.01 # 最近能看到多近
self.trans = trans # 相机中心的平移
self.scale = scale # 相机中心坐标的缩放
self.world_view_transform = torch.tensor(getworld2view2(r, t, trans, scale)).transpose(0, 1).cuda() # 世界到相机坐标系的变换矩阵,4×4
self.projection_matrix = getprojectionmatrix(znear=self.znear, zfar=self.zfar, fovx=self.fovx, fovy=self.fovy).transpose(0,1).cuda() # 投影矩阵
self.full_proj_transform = (self.world_view_transform.unsqueeze(0).bmm(self.projection_matrix.unsqueeze(0))).squeeze(0) # 从世界坐标系到图像的变换矩阵
self.camera_center = self.world_view_transform.inverse()[3, :3] # 相机在世界坐标系下的坐标
其中出现的辅助函数:
# utils/graphic_utils.py
def getworld2view2(r, t, translate=np.array([.0, .0, .0]), scale=1.0):
rt = np.zeros((4, 4)) # 按理来说是世界到相机的变换矩阵,但没有加平移和缩放
rt[:3, :3] = r.transpose()
rt[:3, 3] = t
rt[3, 3] = 1.0
c2w = np.linalg.inv(rt) # 相机到世界的变换矩阵
cam_center = c2w[:3, 3] # 相机中心在世界中的坐标,即c2w矩阵第四列的三维平移向量
cam_center = (cam_center + translate) * scale # 相机中心坐标需要平移和缩放处理
c2w[:3, 3] = cam_center # 重新填入c2w矩阵
rt = np.linalg.inv(c2w) # 再取逆获得w2c矩阵
return np.float32(rt)
四、前向传播(渲染):submodules/diff-gaussian-rasterization/cuda_rasterizer/forward.cu
预备知识:cuda编程基础
这部分的参考资料:
[1] cuda tutorial
[2] an even easier introduction to cuda
[3] introduction to cuda programming
cuda是一个为支持cuda的gpu提供的平台和编程模型。该平台使gpu能够进行通用计算。cuda提供了c/c++语言扩展和api,以便用户利用gpu进行高效计算。一般称cpu为host,gpu为device。
cuda c++语言中有一个加在函数前面的关键字__global__,用于表明该函数是运行在gpu上的,并且可以被cpu调用。这种函数称为kernel。
当我们调用kernel的时候,需要在函数名和括号之间加上<<<m, t>>>,其中m是block的个数,t是每个block中线程的个数。这些线程都是并行执行的,每个线程中都在执行该函数。
根据参考资料[3],gpu在同一时刻运行一个kernel(也就是一组任务),kernel运行在grid上,每个grid由多个block组成(他们是独立的alu组),每个block有多个线程。
同一block中的线程一般合作完成任务,它们可以共享内存(这部分内存速度极快,用__shared__关键字声明)。每个线程“知道”它在哪个block(通过访问内置变量blockidx.x)和它是第几个线程(通过访问变量threadidx.x),以及每个block有多少个线程(blockdim.x),从而确定它应该完成什么任务。实际上线程和block的索引是三维的,这里只举了一个一维的例子。

注意gpu和cpu的内存是隔离的,想要操作显存或者在显存和cpu内存之间进行交流必须显示的声明这些操作。指针也是不一样的,有可能虽然都是int*,但表示的含义却不同:device指针指向显存,host指针指向cpu内存。cuda提供了操作内存的内置函数:cudamalloc、cudafree、cudamemcpy等,它们分别类似于c函数malloc、free和memcpy。
关于同步方面,内置函数 __syncthreads()可以同步一个block中的所有线程。在cpu中调用内置函数cudadevicesynchronize()可以可以阻塞cpu,直到所有先前发出的cuda调用都完成为止。
另外还有__host__关键字和__device__关键字,前者表示该函数只编译成cpu版本(这是默认状态),后者表示只编译成gpu版本。二者同时使用表示编译cpu和gpu两个版本。从cpu调用__device__函数和从gpu调用__host__函数都会报错。
以下是一个cuda并行计算向量加法的示例:
#include <stdio.h>
int a[10] = {0, 1, 2, 3, 4, 5, 6, 7, 8, 9};
int b[10] = {0, 10, 20, 30, 40, 50, 60, 70, 80, 90};
int c[10];
__global__ void vec_add(int* a, int* b, int* c)
{
int i = blockidx.x * blockdim.x + threadidx.x;
c[i] = a[i] + b[i];
}
int main()
{
int* gpua, *gpub, *gpuc;
int sz = 10 * sizeof(int);
cudamalloc((void**)&gpua, sz); // 在gpu中分配内存
cudamalloc((void**)&gpub, sz);
cudamalloc((void**)&gpuc, sz);
cudamemcpy(gpua, a, sz, cudamemcpyhosttodevice); // 拷贝cpu中的数组到gpu
cudamemcpy(gpub, b, sz, cudamemcpyhosttodevice);
vec_add<<<2, 5>>>(gpua, gpub, gpuc); // 调用kernel
cudadevicesynchronize(); // 等gpu执行完(这里其实不是很有必要)
cudamemcpy(c, gpuc, sz, cudamemcpydevicetohost); // 把gpu的计算结果拷贝到cpu
for(int i = 0; i < 10; i++)
{
printf("%d\n", c[i]); // 输出结果,结果为0、11、22、……、99
}
return 0;
}
有了这些预备知识之后,我们就可以开始看代码了。在看cuda代码之前,我们先看看gaussian_renderer/__init__.py中的render函数。
def render(viewpoint_camera, pc : gaussianmodel, pipe, bg_color : torch.tensor, scaling_modifier = 1.0, override_color = none)
def render(viewpoint_camera, pc : gaussianmodel, pipe, bg_color : torch.tensor, scaling_modifier = 1.0, override_color = none):
'''
viewpoint_camera: scene.cameras.camera类的实例
pipe: 流水线,规定了要干什么
'''
# create zero tensor. we will use it to make pytorch return gradients of the 2d (screen-space) means
screenspace_points = torch.zeros_like(pc.get_xyz, dtype=pc.get_xyz.dtype, requires_grad=true, device="cuda") + 0
try:
screenspace_points.retain_grad() # 让screenspace_points在反向传播时接受梯度
except:
pass
# set up rasterization configuration
tanfovx = math.tan(viewpoint_camera.fovx * 0.5)
tanfovy = math.tan(viewpoint_camera.fovy * 0.5)
raster_settings = gaussianrasterizationsettings(
image_height=int(viewpoint_camera.image_height),
image_width=int(viewpoint_camera.image_width),
tanfovx=tanfovx,
tanfovy=tanfovy,
bg=bg_color, # 背景颜色
scale_modifier=scaling_modifier,
viewmatrix=viewpoint_camera.world_view_transform, # w2c矩阵
projmatrix=viewpoint_camera.full_proj_transform, # 世界到图像的投影矩阵
sh_degree=pc.active_sh_degree, # 目前的球谐阶数
campos=viewpoint_camera.camera_center, # camera center position,相机中心文职
prefiltered=false,
debug=pipe.debug
)
rasterizer = gaussianrasterizer(raster_settings=raster_settings)
means3d = pc.get_xyz
means2d = screenspace_points # 疑似各个gaussian的中心投影到在图像中的坐标
opacity = pc.get_opacity # 不透明度
# if precomputed 3d covariance is provided, use it. if not, then it will be computed from
# scaling / rotation by the rasterizer.
scales = none
rotations = none
cov3d_precomp = none
if pipe.compute_cov3d_python:
cov3d_precomp = pc.get_covariance(scaling_modifier)
else:
scales = pc.get_scaling
rotations = pc.get_rotation
# if precomputed colors are provided, use them. otherwise, if it is desired to precompute colors
# from shs in python, do it. if not, then sh -> rgb conversion will be done by rasterizer.
shs = none
colors_precomp = none
if override_color is none:
if pipe.convert_shs_python:
shs_view = pc.get_features.transpose(1, 2).view(-1, 3, (pc.max_sh_degree+1)**2)
dir_pp = (pc.get_xyz - viewpoint_camera.camera_center.repeat(pc.get_features.shape[0], 1))
dir_pp_normalized = dir_pp/dir_pp.norm(dim=1, keepdim=true)
# 找到高斯中心到相机的光线在单位球体上的坐标
sh2rgb = eval_sh(pc.active_sh_degree, shs_view, dir_pp_normalized)
# 球谐的傅里叶系数转成rgb颜色
colors_precomp = torch.clamp_min(sh2rgb + 0.5, 0.0)
else:
shs = pc.get_features
else:
colors_precomp = override_color
# rasterize visible gaussians to image, obtain their radii (on screen).
rendered_image, radii = rasterizer(
means3d = means3d,
means2d = means2d,
shs = shs,
colors_precomp = colors_precomp,
opacities = opacity,
scales = scales,
rotations = rotations,
cov3d_precomp = cov3d_precomp)
# those gaussians that were frustum culled or had a radius of 0 were not visible.
# they will be excluded from value updates used in the splitting criteria.
return {"render": rendered_image,
"viewspace_points": screenspace_points,
"visibility_filter" : radii > 0,
"radii": radii}
cuda文件rasterizer_impl.cu: submodules/diff-gaussian-rasterization/cuda_rasterizer
1. 引用头文件
#include "rasterizer_impl.h"
#include <iostream>
#include <fstream>
#include <algorithm>
#include <numeric>
#include <cuda.h>
#include "cuda_runtime.h"
#include "device_launch_parameters.h"
#include <cub/cub.cuh> // cuda的cub库
#include <cub/device/device_radix_sort.cuh>
#define glm_force_cuda
#include <glm/glm.hpp> // glm (opengl mathematics)库
#include <cooperative_groups.h> // cuda 9引入的cooperative groups库
#include <cooperative_groups/reduce.h>
namespace cg = cooperative_groups;
#include "auxiliary.h"
#include "forward.h"
#include "backward.h"
有一些库需要我们讲解一下。
(1) cooperative groups
参考资料:
我们直到 __syncthreads()函数提供了在一个block内同步各线程的方法,但有时要同步block内的一部分线程或者多个block的线程,这时候就需要cooperative groups库了。这个库定义了划分和同步一组线程的方法。
在gaussian splatting的所有cuda代码中,这个库仅以两种方式被调用:
🥕(a)
auto idx = cg::this_grid().thread_rank();
cg::this_grid()返回一个cg::grid_group实例,表示当前线程所处的grid。他有一个方法thread_rank()返回当前线程在该grid中排第几。
🥕(b)
auto block = cg::this_thread_block();
cg::this_thread_block返回一个cg::thread_block实例。代码中用到的成员函数有:
block.sync():同步该block中的所有线程(等价于__syncthreads())。block.thread_rank():返回非负整数,表示当前线程在该block中排第几。block.group_index():返回一个cg::dim3实例,表示该block在grid中的三维索引。block.thread_index():返回一个cg::dim3实例,表示当前线程在block中的三维索引。
(2) cub
参考资料:cub api
换言之,cub就是针对不同的计算等级:线程、wap、block、device等设计了并行算法。例如,reduce函数有四个版本:threadreduce、warpreduce、blockreduce、devicereduce。
diff-gaussian-rasterization模块调用了cub库的两个函数:
⭐️ (a) cub::devicescan::inclusivesum
这个函数是算前缀和的。所谓"inclusive"就是第 i i i个数被计入第 i i i个和中。函数定义如下:
template<typename inputiteratort, typename outputiteratort>
static inline cudaerror_t inclusivesum(
void *d_temp_storage, // 额外需要的临时显存空间
size_t &temp_storage_bytes, // 临时显存空间的大小
inputiteratort d_in, // 输入指针
outputiteratort d_out, // 输出指针
int num_items, // 元素个数
cudastream_t stream = 0)
⭐️ (b) cub::deviceradixsort::sortpairs:device级别的并行基数排序
该函数根据key将(key, value)对进行升序排序。这是一种稳定排序。
函数定义如下:
template<typename keyt, typename valuet, typename numitemst>
static inline cudaerror_t sortpairs(
void *d_temp_storage, // 排序时用到的临时显存空间
size_t &temp_storage_bytes, // 临时显存空间的大小
const keyt *d_keys_in, keyt *d_keys_out, // key的输入和输出指针
const valuet *d_values_in, valuet *d_values_out, // value的输入和输出指针
numitemst num_items, // 对多少个条目进行排序
int begin_bit = 0, // 低位
int end_bit = sizeof(keyt) * 8, // 高位
cudastream_t stream = 0)
// 按照[begin_bit, end_bit)内的位进行排序
示例代码:
#include <stdio.h>
#include <cub/cub.cuh>
// or equivalently <cub/device/device_radix_sort.cuh>
int main()
{
// declare, allocate, and initialize device-accessible pointers
// for sorting data
int num_items = 7;
int keys_in[7] = {8, 6, 7, 5, 3, 0, 9};
int* d_keys_in, *d_keys_out;
int values_in[7] = {0, 1, 2, 3, 4, 5, 6};
int* d_values_in, *d_values_out;
int keys_out[7], values_out[7];
// 下面把数据搬到显存中
int sz = 7 * sizeof(int);
cudamalloc((void**)&d_values_in, sz);
cudamalloc((void**)&d_values_out, sz);
cudamalloc((void**)&d_keys_in, sz);
cudamalloc((void**)&d_keys_out, sz);
cudamemcpy(d_keys_in, keys_in, sz, cudamemcpyhosttodevice);
cudamemcpy(d_values_in, values_in, sz, cudamemcpyhosttodevice);
// determine temporary device storage requirements
void *d_temp_storage = null;
size_t temp_storage_bytes = 0;
cub::deviceradixsort::sortpairs(d_temp_storage, temp_storage_bytes,
d_keys_in, d_keys_out, d_values_in, d_values_out, num_items);
// allocate temporary storage
cudamalloc(&d_temp_storage, temp_storage_bytes);
// run sorting operation
cub::deviceradixsort::sortpairs(d_temp_storage, temp_storage_bytes,
d_keys_in, d_keys_out, d_values_in, d_values_out, num_items);
// 结果:
// d_keys_out <-- [0, 3, 5, 6, 7, 8, 9]
// d_values_out <-- [5, 4, 3, 1, 2, 0, 6]
// 把算好的数据搬回来
cudamemcpy(keys_out, d_keys_out, sz, cudamemcpydevicetohost);
cudamemcpy(values_out, d_values_out, sz, cudamemcpydevicetohost);
puts("keys");
for(int i = 0; i < 7; i++)
{
printf("%d ", keys_out[i]);
}
puts("\nvalues");
for(int i = 0; i < 7; i++)
{
printf("%d ", values_out[i]);
}
cudafree(d_keys_in);
cudafree(d_keys_out);
cudafree(d_values_in);
cudafree(d_values_out);
return 0;
}
(3) glm
参考资料:glm的github页面
glm意为“opengl mathematics”,是一个专为图形学设计的只有头文件的c++数学库。
gaussian splatting的代码中用到了glm::vec3(三维向量), glm::vec4(四维向量), glm::mat3(3×3矩阵)和glm::dot(向量点积)。
2. gethighermsb
// helper function to find the next-highest bit of the msb
// on the cpu.
uint32_t gethighermsb(uint32_t n)
{
uint32_t msb = sizeof(n) * 4;
uint32_t step = msb;
while (step > 1)
{
step /= 2;
if (n >> msb)
msb += step;
else
msb -= step;
}
if (n >> msb)
msb++;
return msb;
}
这个函数似乎是用二分法检测n表示成二进制数除去前导零有几位(n=0时返回1)。我写了一个测试程序推测它的功能:
#include <iostream>
uint32_t gethighermsb(uint32_t n);
int main()
{
uint32_t n[] = {0b0, 0b1, 0b10, 0b11, 0b111, 0b10101, 0b1110001};
for(int i = 0; i < sizeof(n) / sizeof(uint32_t); i++)
std::cout << gethighermsb(n[i]) << ", ";
// 结果:1, 1, 2, 2, 3, 5, 7,
}
该函数只被调用过一次(在cudarasterizer::rasterizer::forward函数中),我们随后再推断它的具体含义。
3. checkfrustum和markvisible
根据函数命名和上下文推断,这两个函数的作用是检查一些gaussians是否在一个给定相机的视锥内,从而确定它能不能被该相机看见。
// wrapper method to call auxiliary coarse frustum containment test.
// mark all gaussians that pass it.
__global__ void checkfrustum(int p, // 需要检查的点的个数
const float* orig_points, // 需要检查的点的世界坐标
const float* viewmatrix, // w2c矩阵
const float* projmatrix, // 投影矩阵
bool* present) // 返回值,表示能不能被看见
{
auto idx = cg::this_grid().thread_rank();
if (idx >= p)
return;
float3 p_view;
present[idx] = in_frustum(idx, orig_points, viewmatrix, projmatrix, false, p_view);
}
// mark gaussians as visible/invisible, based on view frustum testing
void cudarasterizer::rasterizer::markvisible(
int p,
float* means3d, // gaussians的中心点坐标
float* viewmatrix,
float* projmatrix,
bool* present)
{
checkfrustum << <(p + 255) / 256, 256 >> > (
p,
means3d,
viewmatrix, projmatrix,
present);
}
4. 几个fromchunk
这些函数的作用是从以char数组形式存储的二进制块中读取geometrystate、imagestate、binningstate等类的信息。
cudarasterizer::geometrystate cudarasterizer::geometrystate::fromchunk(char*& chunk, size_t p)
{
geometrystate geom;
obtain(chunk, geom.depths, p, 128);
obtain(chunk, geom.clamped, p * 3, 128);
obtain(chunk, geom.internal_radii, p, 128);
obtain(chunk, geom.means2d, p, 128);
obtain(chunk, geom.cov3d, p * 6, 128);
obtain(chunk, geom.conic_opacity, p, 128);
obtain(chunk, geom.rgb, p * 3, 128);
obtain(chunk, geom.tiles_touched, p, 128);
cub::devicescan::inclusivesum(nullptr, geom.scan_size, geom.tiles_touched, geom.tiles_touched, p);
obtain(chunk, geom.scanning_space, geom.scan_size, 128);
obtain(chunk, geom.point_offsets, p, 128);
return geom;
}
cudarasterizer::imagestate cudarasterizer::imagestate::fromchunk(char*& chunk, size_t n)
{
imagestate img;
obtain(chunk, img.accum_alpha, n, 128);
obtain(chunk, img.n_contrib, n, 128);
obtain(chunk, img.ranges, n, 128);
return img;
}
cudarasterizer::binningstate cudarasterizer::binningstate::fromchunk(char*& chunk, size_t p)
{
binningstate binning;
obtain(chunk, binning.point_list, p, 128);
obtain(chunk, binning.point_list_unsorted, p, 128);
obtain(chunk, binning.point_list_keys, p, 128);
obtain(chunk, binning.point_list_keys_unsorted, p, 128);
cub::deviceradixsort::sortpairs(
nullptr, binning.sorting_size,
binning.point_list_keys_unsorted, binning.point_list_keys,
binning.point_list_unsorted, binning.point_list, p);
obtain(chunk, binning.list_sorting_space, binning.sorting_size, 128);
return binning;
}
5. 为排序做准备:duplicatewithkeys
// generates one key/value pair for all gaussian / tile overlaps.
// run once per gaussian (1:n mapping).
__global__ void duplicatewithkeys(
int p,
const float2* points_xy,
const float* depths,
const uint32_t* offsets,
uint64_t* gaussian_keys_unsorted,
uint32_t* gaussian_values_unsorted,
int* radii,
dim3 grid)
{
auto idx = cg::this_grid().thread_rank(); // 线程索引,该显线程处理第idx个gaussian
if (idx >= p)
return;
// generate no key/value pair for invisible gaussians
if (radii[idx] > 0)
{
// find this gaussian's offset in buffer for writing keys/values.
uint32_t off = (idx == 0) ? 0 : offsets[idx - 1];
uint2 rect_min, rect_max;
getrect(points_xy[idx], radii[idx], rect_min, rect_max, grid);
// 因为要给gaussian覆盖的每个tile生成一个(key, value)对,
// 所以先获取它占了哪些tile
// for each tile that the bounding rect overlaps, emit a
// key/value pair. the key is | tile id | depth |,
// and the value is the id of the gaussian. sorting the values
// with this key yields gaussian ids in a list, such that they
// are first sorted by tile and then by depth.
for (int y = rect_min.y; y < rect_max.y; y++)
{
for (int x = rect_min.x; x < rect_max.x; x++)
{
uint64_t key = y * grid.x + x; // tile的id
key <<= 32; // 放在高位
key |= *((uint32_t*)&depths[idx]); // 低位是深度
gaussian_keys_unsorted[off] = key;
gaussian_values_unsorted[off] = idx;
off++; // 数组中的偏移量
}
}
}
}
6. 排序之后的处理:identifytileranges
// check keys to see if it is at the start/end of one tile's range in
// the full sorted list. if yes, write start/end of this tile.
// run once per instanced (duplicated) gaussian id.
__global__ void identifytileranges(
int l, // 排序列表中的元素个数
uint64_t* point_list_keys, // 排过序的keys
uint2* ranges)
// ranges[tile_id].x和y表示第tile_id个tile在排过序的列表中的起始和终止地址
{
auto idx = cg::this_grid().thread_rank();
if (idx >= l)
return;
// read tile id from key. update start/end of tile range if at limit.
uint64_t key = point_list_keys[idx];
uint32_t currtile = key >> 32; // 当前tile
if (idx == 0)
ranges[currtile].x = 0; // 边界条件:tile 0的起始位置
else
{
uint32_t prevtile = point_list_keys[idx - 1] >> 32;
if (currtile != prevtile)
// 上一个元素和我处于不同的tile,
// 那我是上一个tile的终止位置和我所在tile的起始位置
{
ranges[prevtile].y = idx;
ranges[currtile].x = idx;
}
}
if (idx == l - 1)
ranges[currtile].y = l; // 边界条件:最后一个tile的终止位置
}
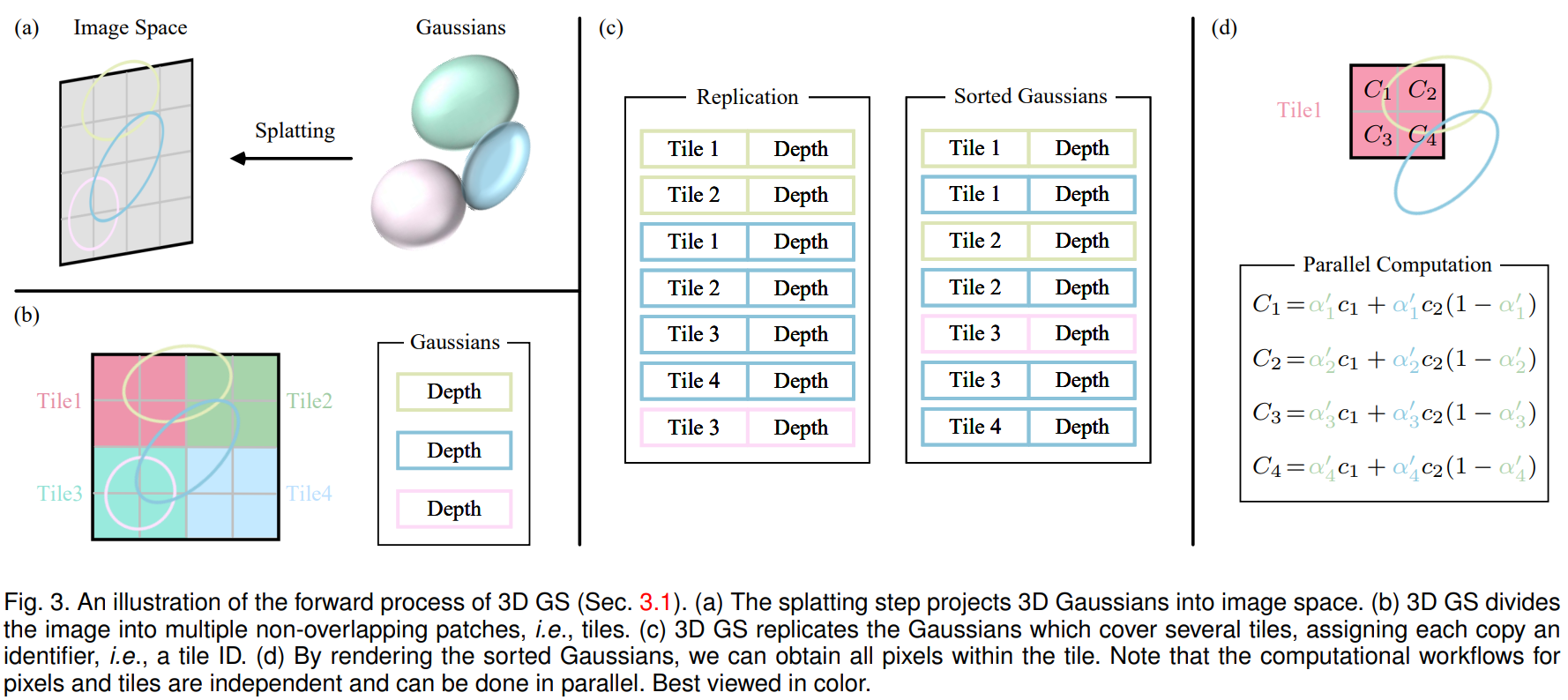
7. 重头戏:前向传播forward
原文第6节(fast differentiable rasterizer for gaussians):
附录c中的伪代码如下:
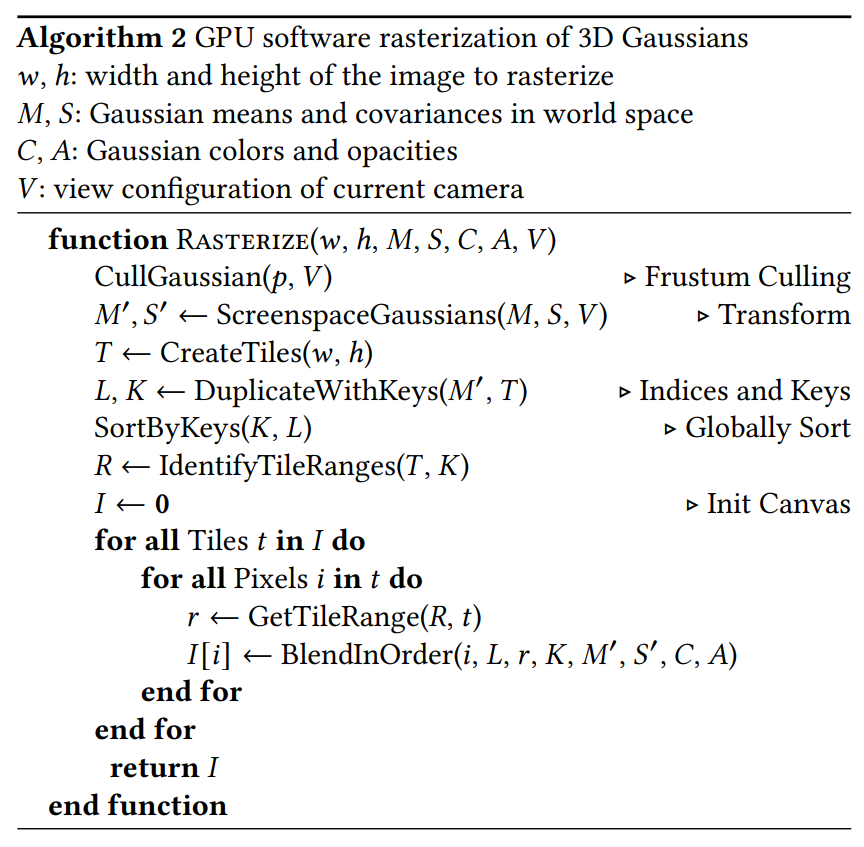
前向传播过程可以用该图片概括(出处:a survey on 3d gaussian splatting):
// forward rendering procedure for differentiable rasterization
// of gaussians.
int cudarasterizer::rasterizer::forward(
std::function<char* (size_t)> geometrybuffer,
std::function<char* (size_t)> binningbuffer,
std::function<char* (size_t)> imagebuffer,
/*
上面的三个参数是用于分配缓冲区的函数,
在submodules/diff-gaussian-rasterization/rasterize_points.cu中定义
*/
const int p, // gaussian的数量
int d, // 对应于gaussianmodel.active_sh_degree,是球谐度数(本文参考的学习笔记在这里是错误的)
int m, // rgb三通道的球谐傅里叶系数个数,应等于3 × (d + 1)²(本文参考的学习笔记在这里也是错误的)
const float* background,
const int width, int height, // 图片宽高
const float* means3d, // gaussians的中心坐标
const float* shs, // 球谐系数
const float* colors_precomp, // 预先计算的rgb颜色
const float* opacities, // 不透明度
const float* scales, // 缩放
const float scale_modifier, // 缩放的修正项
const float* rotations, // 旋转
const float* cov3d_precomp, // 预先计算的3维协方差矩阵
const float* viewmatrix, // w2c矩阵
const float* projmatrix, // 投影矩阵
const float* cam_pos, // 相机坐标
const float tan_fovx, float tan_fovy, // 视场角一半的正切值
const bool prefiltered,
float* out_color, // 输出的颜色
int* radii, // 各gaussian在像平面上用3σ原则截取后的半径
bool debug)
{
const float focal_y = height / (2.0f * tan_fovy); // y方向的焦距
const float focal_x = width / (2.0f * tan_fovx); // x方向的焦距
/*
注意tan_fov = tan(fov / 2) (见上面的render函数)。
而tan(fov / 2)就是图像宽/高的一半与焦距之比。
以x方向为例,tan(fovx / 2) = width / 2 / focal_x,
故focal_x = width / (2 * tan(fovx / 2)) = width / (2 * tan_fovx)。
*/
// 下面初始化一些缓冲区
size_t chunk_size = required<geometrystate>(p); // geometrystate占据空间的大小
char* chunkptr = geometrybuffer(chunk_size);
geometrystate geomstate = geometrystate::fromchunk(chunkptr, p);
if (radii == nullptr)
{
radii = geomstate.internal_radii;
}
dim3 tile_grid((width + block_x - 1) / block_x, (height + block_y - 1) / block_y, 1);
// block_x = block_y = 16,准备分解成16×16的tiles。
// 之所以不能分解成更大的tiles,是因为对于同一张图片的离得较远的像素点而言
// gaussian按深度排序的结果可能是不同的。
// (想象一下两个gaussians离像平面很近,一个靠近图像左边缘,一个靠近右边缘)
// dim3是cuda定义的含义x,y,z三个成员的三维unsigned int向量类。
// tile_grid就是x和y方向上tile的个数。
dim3 block(block_x, block_y, 1);
// dynamically resize image-based auxiliary buffers during training
size_t img_chunk_size = required<imagestate>(width * height);
char* img_chunkptr = imagebuffer(img_chunk_size);
imagestate imgstate = imagestate::fromchunk(img_chunkptr, width * height);
if (num_channels != 3 && colors_precomp == nullptr)
{
throw std::runtime_error("for non-rgb, provide precomputed gaussian colors!");
}
// run preprocessing per-gaussian (transformation, bounding, conversion of shs to rgb)
check_cuda(forward::preprocess(
p, d, m,
means3d,
(glm::vec3*)scales,
scale_modifier,
(glm::vec4*)rotations,
opacities,
shs,
geomstate.clamped,
cov3d_precomp,
colors_precomp,
viewmatrix, projmatrix,
(glm::vec3*)cam_pos,
width, height,
focal_x, focal_y,
tan_fovx, tan_fovy,
radii,
geomstate.means2d, // gaussian投影到像平面上的中心坐标
geomstate.depths, // gaussian的深度
geomstate.cov3d, // 三维协方差矩阵
geomstate.rgb, // 颜色
geomstate.conic_opacity, // 椭圆二次型的矩阵和不透明度的打包向量
tile_grid, //
geomstate.tiles_touched,
prefiltered
), debug) // 预处理,主要涉及把3d的gaussian投影到2d
// compute prefix sum over full list of touched tile counts by gaussians
// e.g., [2, 3, 0, 2, 1] -> [2, 5, 5, 7, 8]
check_cuda(cub::devicescan::inclusivesum(geomstate.scanning_space, geomstate.scan_size, geomstate.tiles_touched, geomstate.point_offsets, p), debug)
// 这步是为duplicatewithkeys做准备
// (计算出每个gaussian对应的keys和values在数组中存储的起始位置)
// retrieve total number of gaussian instances to launch and resize aux buffers
int num_rendered;
check_cuda(cudamemcpy(&num_rendered, geomstate.point_offsets + p - 1, sizeof(int), cudamemcpydevicetohost), debug); // 东西塞到gpu里面去
size_t binning_chunk_size = required<binningstate>(num_rendered);
char* binning_chunkptr = binningbuffer(binning_chunk_size);
binningstate binningstate = binningstate::fromchunk(binning_chunkptr, num_rendered);
// for each instance to be rendered, produce adequate [ tile | depth ] key
// and corresponding dublicated gaussian indices to be sorted
duplicatewithkeys << <(p + 255) / 256, 256 >> > (
p,
geomstate.means2d,
geomstate.depths,
geomstate.point_offsets,
binningstate.point_list_keys_unsorted,
binningstate.point_list_unsorted,
radii,
tile_grid) // 生成排序所用的keys和values
check_cuda(, debug)
int bit = gethighermsb(tile_grid.x * tile_grid.y);
// sort complete list of (duplicated) gaussian indices by keys
check_cuda(cub::deviceradixsort::sortpairs(
binningstate.list_sorting_space,
binningstate.sorting_size,
binningstate.point_list_keys_unsorted, binningstate.point_list_keys,
binningstate.point_list_unsorted, binningstate.point_list,
num_rendered, 0, 32 + bit), debug)
// 进行排序,按keys排序:每个tile对应的gaussians按深度放在一起;value是gaussian的id
check_cuda(cudamemset(imgstate.ranges, 0, tile_grid.x * tile_grid.y * sizeof(uint2)), debug);
// identify start and end of per-tile workloads in sorted list
if (num_rendered > 0)
identifytileranges << <(num_rendered + 255) / 256, 256 >> > (
num_rendered,
binningstate.point_list_keys,
imgstate.ranges); // 计算每个tile对应排序过的数组中的哪一部分
check_cuda(, debug)
// let each tile blend its range of gaussians independently in parallel
const float* feature_ptr = colors_precomp != nullptr ? colors_precomp : geomstate.rgb;
check_cuda(forward::render(
tile_grid, block, // block: 每个tile的大小
imgstate.ranges,
binningstate.point_list,
width, height,
geomstate.means2d,
feature_ptr,
geomstate.conic_opacity,
imgstate.accum_alpha,
imgstate.n_contrib,
background,
out_color), debug) // 最后,进行渲染
return num_rendered;
}
cuda文件forward.cu: submodules/diff-gaussian-rasterization/cuda_rasterizer
1. computecolorfromsh
函数定义如下(内容从略):
__device__ glm::vec3 computecolorfromsh(
int idx, // 该线程负责第几个gaussian
int deg, // 球谐的度数
int max_coeffs, // 一个gaussian最多有几个傅里叶系数
const glm::vec3* means, // gaussian中心位置
glm::vec3 campos, // 相机位置
const float* shs, // 球谐系数
bool* clamped) // 表示每个值是否被截断了(rgb只能为正数),这个在反向传播的时候用
{
// the implementation is loosely based on code for
// "differentiable point-based radiance fields for
// efficient view synthesis" by zhang et al. (2022)
glm::vec3 pos = means[idx];
glm::vec3 dir = pos - campos;
dir = dir / glm::length(dir); // dir = direction,即观察方向
...
// rgb colors are clamped to positive values. if values are
// clamped, we need to keep track of this for the backward pass.
clamped[3 * idx + 0] = (result.x < 0);
clamped[3 * idx + 1] = (result.y < 0);
clamped[3 * idx + 2] = (result.z < 0);
return glm::max(result, 0.0f);
}
该函数从球谐系数相机观察每个gaussian的rgb颜色。
2. computecov2d
// forward version of 2d covariance matrix computation
__device__ float3 computecov2d(
const float3& mean, // gaussian中心坐标
float focal_x, // x方向焦距
float focal_y, // y方向焦距
float tan_fovx,
float tan_fovy,
const float* cov3d, // 已经算出来的三维协方差矩阵
const float* viewmatrix) // w2c矩阵
{
// the following models the steps outlined by equations 29
// and 31 in "ewa splatting" (zwicker et al., 2002).
// additionally considers aspect / scaling of viewport.
// transposes used to account for row-/column-major conventions.
float3 t = transformpoint4x3(mean, viewmatrix);
// w2c矩阵乘gaussian中心坐标得其在相机坐标系下的坐标
const float limx = 1.3f * tan_fovx;
const float limy = 1.3f * tan_fovy;
const float txtz = t.x / t.z; // gaussian中心在像平面上的x坐标
const float tytz = t.y / t.z; // gaussian中心在像平面上的y坐标
t.x = min(limx, max(-limx, txtz)) * t.z;
t.y = min(limy, max(-limy, tytz)) * t.z;
glm::mat3 j = glm::mat3(
focal_x / t.z, 0.0f, -(focal_x * t.x) / (t.z * t.z),
0.0f, focal_y / t.z, -(focal_y * t.y) / (t.z * t.z),
0, 0, 0); // 雅可比矩阵(用泰勒展开近似)
glm::mat3 w = glm::mat3( // w2c矩阵
viewmatrix[0], viewmatrix[4], viewmatrix[8],
viewmatrix[1], viewmatrix[5], viewmatrix[9],
viewmatrix[2], viewmatrix[6], viewmatrix[10]);
glm::mat3 t = w * j;
glm::mat3 vrk = glm::mat3( // 3d协方差矩阵,是对称阵
cov3d[0], cov3d[1], cov3d[2],
cov3d[1], cov3d[3], cov3d[4],
cov3d[2], cov3d[4], cov3d[5]);
glm::mat3 cov = glm::transpose(t) * glm::transpose(vrk) * t;
// transpose(j) @ transpose(w) @ vrk @ w @ j
// apply low-pass filter: every gaussian should be at least
// one pixel wide/high. discard 3rd row and column.
cov[0][0] += 0.3f;
cov[1][1] += 0.3f;
return { float(cov[0][0]), float(cov[0][1]), float(cov[1][1]) };
// 协方差矩阵是对称的,只用存储上三角,故只返回三个数
}
该函数的理论基础是论文ewa splatting的6.2.2节:
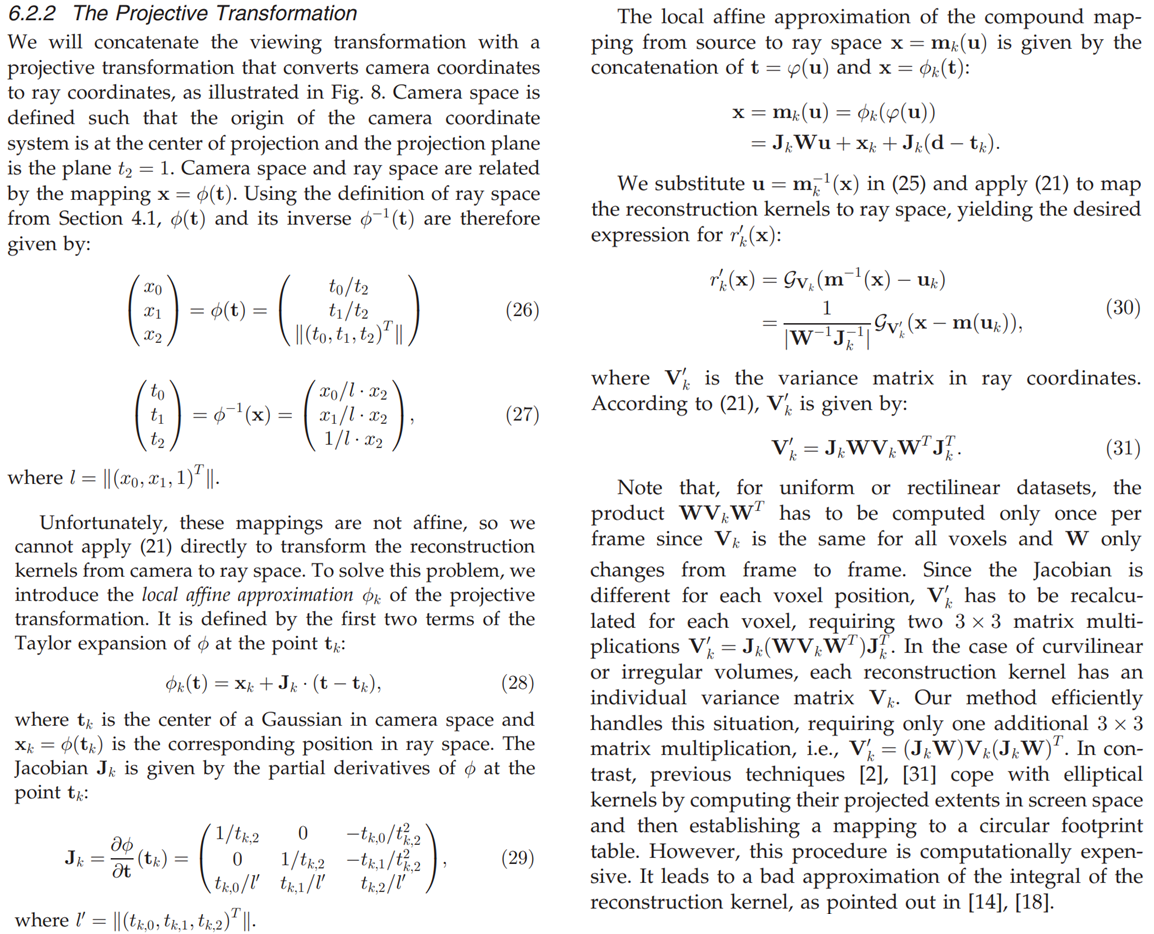
由于近大远小的原理,三维椭球体在二维图片上表现出来不一定是椭圆,而是一种被压扁的形状(下图右下所示)。
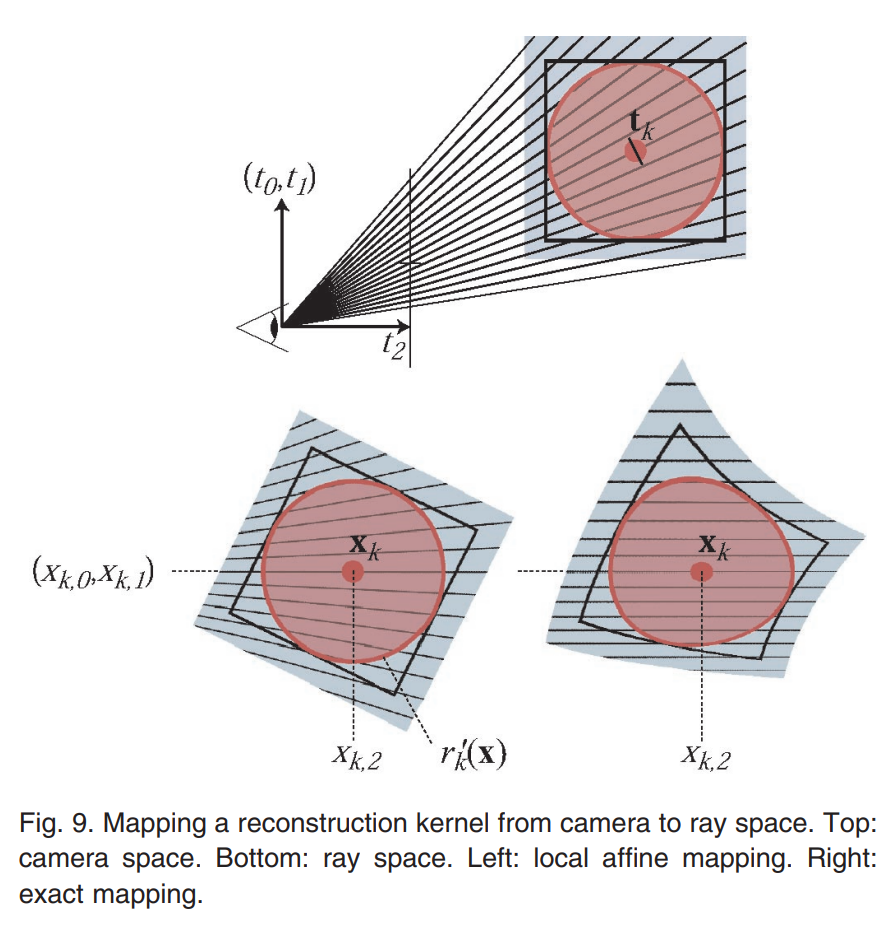
我们想要投影的结果仍然是一个椭圆形。办法是,利用泰勒公式进行近似。论文中 ( t 0 , t 1 , t 2 ) t (t_0,t_1,t_2)^t (t0,t1,t2)t表示相机坐标系下的坐标, ( x 0 , x 1 ) (x_0,x_1) (x0,x1)为像平面坐标系下的二维坐标, x 2 x_2 x2代表深度(物体到相机中心的距离)。回想一下泰勒公式的标量形式: f ( x ) = f ( x 0 ) + f ′ ( x 0 ) ( x − x 0 ) + ⋯ f(x)=f(x_0)+f'(x_0)(x-x_0)+\cdots f(x)=f(x0)+f′(x0)(x−x0)+⋯将 x ↦ t x\mapsto\boldsymbol{t} x↦t, f ( x ) ↦ x f(x)\mapsto\boldsymbol{x} f(x)↦x, x 0 ↦ t k x_0\mapsto\boldsymbol{t}_k x0↦tk, f ( x 0 ) ↦ x k f(x_0)\mapsto\boldsymbol{x}_k f(x0)↦xk代入得: x = x k + d x d t ∣ t = t k ( t − t k ) \boldsymbol{x}=\boldsymbol{x}_k+\left.\cfrac{d\boldsymbol{x}}{d\boldsymbol{t}}\right|_{\boldsymbol{t}=\boldsymbol{t}_k}(\boldsymbol{t}-\boldsymbol{t}_k) x=xk+dtdx t=tk(t−tk)其中雅可比矩阵 j k = d x d t ∣ t = t k \left.\boldsymbol{j}_k=\cfrac{d\boldsymbol{x}}{d\boldsymbol{t}}\right|_{\boldsymbol{t}=\boldsymbol{t}_k} jk=dtdx t=tk。注意 x k \boldsymbol{x}_k xk和 t k \boldsymbol{t}_k tk分别代表二维和三维gaussian中心,必须用原始的精确公式计算。
如果你检查一下论文中出现的 j k \boldsymbol{j}_k jk就会发现它是 x \boldsymbol x x对 t \boldsymbol t t的导。例如,其 ( 0 , 0 ) (0,0) (0,0)项为 1 t k , 2 \cfrac{1}{t_{k,2}} tk,21,而 x 0 = t 0 t 2 x_0=\cfrac{t_0}{t_2} x0=t2t0,刚好有 ∂ x 0 ∂ t 2 = 1 t 2 \cfrac{\partial x_0}{\partial t_2}=\cfrac{1}{t_{2}} ∂t2∂x0=t21,在 t = t k \boldsymbol{t}=\boldsymbol{t_k} t=tk时就是 1 t k , 2 \cfrac{1}{t_{k,2}} tk,21。
3. computecov3d
根据缩放和旋转计算三维协方差矩阵。比较简单。
// forward method for converting scale and rotation properties of each
// gaussian to a 3d covariance matrix in world space. also takes care
// of quaternion normalization.
__device__ void computecov3d(
const glm::vec3 scale, // 表示缩放的三维向量
float mod, // 对应gaussian_renderer/__init__.py中的scaling_modifier
const glm::vec4 rot, // 表示旋转的四元数
float* cov3d) // 结果:三维协方差矩阵
{
// create scaling matrix
glm::mat3 s = glm::mat3(1.0f);
s[0][0] = mod * scale.x;
s[1][1] = mod * scale.y;
s[2][2] = mod * scale.z;
// normalize quaternion to get valid rotation
glm::vec4 q = rot;// / glm::length(rot);
float r = q.x;
float x = q.y;
float y = q.z;
float z = q.w;
// compute rotation matrix from quaternion
glm::mat3 r = glm::mat3(
1.f - 2.f * (y * y + z * z), 2.f * (x * y - r * z), 2.f * (x * z + r * y),
2.f * (x * y + r * z), 1.f - 2.f * (x * x + z * z), 2.f * (y * z - r * x),
2.f * (x * z - r * y), 2.f * (y * z + r * x), 1.f - 2.f * (x * x + y * y)
);
glm::mat3 m = s * r;
// compute 3d world covariance matrix sigma
glm::mat3 sigma = glm::transpose(m) * m;
// covariance is symmetric, only store upper right
cov3d[0] = sigma[0][0];
cov3d[1] = sigma[0][1];
cov3d[2] = sigma[0][2];
cov3d[3] = sigma[1][1];
cov3d[4] = sigma[1][2];
cov3d[5] = sigma[2][2];
}
4. preprocesscuda
预处理函数,作用是:
- 检查gaussian是否可见(在视锥内);
- 计算3维、2维协方差矩阵;
- 把gaussian投影到图像上,计算图像上的中心坐标、半径和覆盖的tile;
- 计算颜色、深度等杂项。
// perform initial steps for each gaussian prior to rasterization.
template<int c>
__global__ void preprocesscuda(int p, int d, int m,
const float* orig_points, // 也就是cudarasterizer::rasterizer::forward的means3d
const glm::vec3* scales,
const float scale_modifier,
const glm::vec4* rotations,
const float* opacities,
const float* shs,
bool* clamped,
const float* cov3d_precomp,
const float* colors_precomp,
const float* viewmatrix,
const float* projmatrix,
const glm::vec3* cam_pos,
const int w, int h,
const float tan_fovx, float tan_fovy,
const float focal_x, float focal_y,
int* radii,
/*上面这些参数的含义都提到过*/
float2* points_xy_image, // gaussian中心在图像上的像素坐标
float* depths, // gaussian中心的深度,即其在相机坐标系的z轴的坐标
float* cov3ds, // 三维协方差矩阵
float* rgb, // 根据球谐算出的rgb颜色值
float4* conic_opacity, // 椭圆对应二次型的矩阵和不透明度的打包存储
const dim3 grid, // tile的在x、y方向上的数量
uint32_t* tiles_touched, // gaussian覆盖的tile数量
bool prefiltered)
{
auto idx = cg::this_grid().thread_rank(); // 该函数预处理第idx个gaussian
if (idx >= p)
return;
// initialize radius and touched tiles to 0. if this isn't changed,
// this gaussian will not be processed further.
radii[idx] = 0;
tiles_touched[idx] = 0;
// perform near culling, quit if outside.
float3 p_view; // gaussian中心在相机坐标系下的坐标
if (!in_frustum(idx, orig_points, viewmatrix, projmatrix, prefiltered, p_view))
return; // 不在相机的视锥内就不管了
// transform point by projecting
float3 p_orig = { orig_points[3 * idx], orig_points[3 * idx + 1], orig_points[3 * idx + 2] };
float4 p_hom = transformpoint4x4(p_orig, projmatrix); // homogeneous coordinates(齐次坐标)
float p_w = 1.0f / (p_hom.w + 0.0000001f); // 想要除以p_hom.w从而转成正常的3d坐标,这里防止除零
float3 p_proj = { p_hom.x * p_w, p_hom.y * p_w, p_hom.z * p_w };
// if 3d covariance matrix is precomputed, use it, otherwise compute
// from scaling and rotation parameters.
const float* cov3d;
if (cov3d_precomp != nullptr)
{
cov3d = cov3d_precomp + idx * 6;
}
else
{
computecov3d(scales[idx], scale_modifier, rotations[idx], cov3ds + idx * 6);
cov3d = cov3ds + idx * 6;
}
// compute 2d screen-space covariance matrix
float3 cov = computecov2d(p_orig, focal_x, focal_y, tan_fovx, tan_fovy, cov3d, viewmatrix);
// invert covariance (ewa algorithm)
float det = (cov.x * cov.z - cov.y * cov.y); // 二维协方差矩阵的行列式
if (det == 0.0f)
return;
float det_inv = 1.f / det; // 行列式的逆
float3 conic = { cov.z * det_inv, -cov.y * det_inv, cov.x * det_inv };
// conic是cone的形容词,意为“圆锥的”。猜测这里是指圆锥曲线(椭圆)。
// 二阶矩阵求逆口诀:“主对调,副相反”。
// compute extent in screen space (by finding eigenvalues of
// 2d covariance matrix). use extent to compute a bounding rectangle
// of screen-space tiles that this gaussian overlaps with. quit if
// rectangle covers 0 tiles.
float mid = 0.5f * (cov.x + cov.z);
float lambda1 = mid + sqrt(max(0.1f, mid * mid - det));
float lambda2 = mid - sqrt(max(0.1f, mid * mid - det));
// 韦达定理求二维协方差矩阵的特征值
float my_radius = ceil(3.f * sqrt(max(lambda1, lambda2)));
// 原理见代码后面我的补充说明
// 这里就是截取gaussian的中心部位(3σ原则),只取像平面上半径为my_radius的部分
float2 point_image = { ndc2pix(p_proj.x, w), ndc2pix(p_proj.y, h) };
// ndc2pix(v, s) = ((v + 1) * s - 1) / 2 = (v + 1) / 2 * s - 0.5
uint2 rect_min, rect_max;
getrect(point_image, my_radius, rect_min, rect_max, grid);
// 检查该gaussian在图片上覆盖了哪些tile(由一个tile组成的矩形表示)
if ((rect_max.x - rect_min.x) * (rect_max.y - rect_min.y) == 0)
return; // 不与任何tile相交,不管了
// if colors have been precomputed, use them, otherwise convert
// spherical harmonics coefficients to rgb color.
if (colors_precomp == nullptr)
{
glm::vec3 result = computecolorfromsh(idx, d, m, (glm::vec3*)orig_points, *cam_pos, shs, clamped);
rgb[idx * c + 0] = result.x;
rgb[idx * c + 1] = result.y;
rgb[idx * c + 2] = result.z;
}
// store some useful helper data for the next steps.
depths[idx] = p_view.z; // 深度,即相机坐标系的z轴
radii[idx] = my_radius; // gaussian在像平面坐标系下的半径
points_xy_image[idx] = point_image; // gaussian中心在图像上的像素坐标
// inverse 2d covariance and opacity neatly pack into one float4
conic_opacity[idx] = { conic.x, conic.y, conic.z, opacities[idx] };
tiles_touched[idx] = (rect_max.y - rect_min.y) * (rect_max.x - rect_min.x);
// gaussian覆盖的tile数量
}
补充说明
❄️(1) 关于二维高斯分布和椭圆的关系,我们可以这么考虑:
二维高斯分布的概率密度函数为
p
(
x
)
=
1
(
2
π
)
n
2
∣
σ
∣
1
2
exp
{
−
1
2
(
x
−
μ
)
t
σ
−
1
(
x
−
μ
)
}
\begin{equation} p(\boldsymbol{x})=\frac{1}{(2\pi)^{\frac{n}{2}}|\sigma|^{\frac{1}{2}}}\exp\left\{-\frac{1}{2}(\bm{x}-\bm{\mu})^t \sigma^{-1} (\bm{x}-\bm{\mu})\right\} \tag{†} \end{equation}
p(x)=(2π)2n∣σ∣211exp{−21(x−μ)tσ−1(x−μ)}(†),其中
x
=
(
x
,
y
)
t
\boldsymbol{x}=(x,y)^t
x=(x,y)t,
σ
\sigma
σ为协方差矩阵,
μ
\mu
μ为均值。考虑令
p
(
x
)
p(\boldsymbol{x})
p(x)等于一个常数,并令
u
=
x
−
μ
\boldsymbol{u}=\boldsymbol{x}-\boldsymbol{\mu}
u=x−μ,即
u
t
σ
−
1
u
=
r
2
\boldsymbol{u}^t\sigma^{-1}\boldsymbol{u}=r^2
utσ−1u=r2其中
r
2
r^2
r2为常数。由于
σ
\sigma
σ是对称矩阵,一定存在正交矩阵
p
p
p使得
σ
=
p
t
λ
p
\sigma=p^t\lambda p
σ=ptλp其中
λ
=
diag
(
λ
1
,
λ
2
)
\lambda=\operatorname{diag}(\lambda_1,\lambda_2)
λ=diag(λ1,λ2)是由
σ
\sigma
σ的特征值组成的对角矩阵。带入式
(
†
)
(†)
(†)得
u
t
p
t
λ
−
1
p
u
=
r
2
\boldsymbol{u}^t p^t\lambda^{-1} p\boldsymbol{u}=r^2
utptλ−1pu=r2令
v
=
p
u
\boldsymbol{v}=p\boldsymbol{u}
v=pu(也就是相对
u
\boldsymbol{u}
u坐标系旋转了一个角度),则
v
t
λ
−
1
v
=
r
2
\boldsymbol{v}^t\lambda^{-1}\boldsymbol{v}=r^2
vtλ−1v=r2即
v
1
2
λ
1
r
2
+
v
2
2
λ
2
r
2
=
1
\frac{v_1^2}{\lambda_1r^2}+\frac{v_2^2}{\lambda_2 r^2}=1
λ1r2v12+λ2r2v22=1正好是一个长短轴分别为
λ
1
r
\sqrt{\lambda_1}r
λ1r、
λ
2
r
\sqrt{\lambda_2}r
λ2r的椭圆。令
r
=
3
r=3
r=3就得到了代码中算my_radius的公式。
❄️(2) 关于ndc2pix的解读:
这时候我们必须知道p_proj的真正含义。p_proj是projmatrix乘以gaussian中心的世界坐标p_orig的结果(注意这里所有东西都是转置的,transformpoint4x4(const float3& p, const float* matrix)做的事情实际上是
[
x
y
z
1
]
m
\begin{bmatrix}x&y&z&1\end{bmatrix}m
[xyz1]m,其中
m
m
m代表matrix(这里是投影矩阵的转置),
x
,
y
,
z
x,y,z
x,y,z代表p)。proj_matrix又是w2c矩阵和投影矩阵的积。我们重点关注投影矩阵。计算投影矩阵的函数为utils/graph_utils.py中的getprojectionmatrix:
def getprojectionmatrix(znear, zfar, fovx, fovy):
tanhalffovy = math.tan((fovy / 2))
tanhalffovx = math.tan((fovx / 2))
top = tanhalffovy * znear
bottom = -top
right = tanhalffovx * znear
left = -right
p = torch.zeros(4, 4)
z_sign = 1.0
p[0, 0] = 2.0 * znear / (right - left)
p[1, 1] = 2.0 * znear / (top - bottom)
p[0, 2] = (right + left) / (right - left)
p[1, 2] = (top + bottom) / (top - bottom)
p[3, 2] = z_sign
p[2, 2] = z_sign * zfar / (zfar - znear)
p[2, 3] = -(zfar * znear) / (zfar - znear)
return p
这个函数写的极其怪异,p[0,2]和p[1,2]显然为
0
0
0,不知道作者的用意是什么。回想znear和zfar代表该相机能看到的最近和最远距离。注意矩阵
p
p
p是从相机坐标系到像平面二维坐标系的映射,可以表示为
p
=
[
1
t
a
n
h
a
l
f
f
o
v
x
0
0
0
0
1
t
a
n
h
a
l
f
f
o
v
y
0
0
0
0
z
f
a
r
z
f
a
r
−
z
n
e
a
r
z
f
a
r
×
z
n
e
a
r
z
f
a
r
−
z
n
e
a
r
0
0
1
0
]
p=\begin{bmatrix} \frac{1}{\mathrm{tanhalffovx}} &0&0&0\\ 0&\frac{1}{\mathrm{tanhalffovy}}&0&0\\ 0&0&\frac{\mathrm{zfar}}{\mathrm{zfar}-\mathrm{znear}}&\frac{\mathrm{zfar}\times\mathrm{znear}}{\mathrm{zfar}-\mathrm{znear}}\\ 0&0&1&0\\ \end{bmatrix}
p=
tanhalffovx10000tanhalffovy10000zfar−znearzfar100zfar−znearzfar×znear0
所以,
p
[
x
y
z
1
]
=
[
x
t
a
n
h
a
l
f
f
o
v
x
y
t
a
n
h
a
l
f
f
o
v
y
z
f
a
r
(
z
−
z
n
e
a
r
)
z
f
a
r
−
z
n
e
a
r
z
]
p\begin{bmatrix}x\\y\\z\\1\end{bmatrix}= \begin{bmatrix} \cfrac{x}{\mathrm{tanhalffovx}}\\ \\ \cfrac{y}{\mathrm{tanhalffovy}}\\ \\ \cfrac{\mathrm{zfar}(z-\mathrm{znear})}{\mathrm{zfar}-\mathrm{znear}}\\ \\ z \end{bmatrix}
p
xyz1
=
tanhalffovxxtanhalffovyyzfar−znearzfar(z−znear)z
显然,作者假设相机坐标系的
z
z
z轴与像平面垂直。
p
p
p矩阵把
z
z
z的范围
[
z
n
e
a
r
,
z
f
a
r
]
[\mathrm{znear},\mathrm{zfar}]
[znear,zfar]映射到
[
0
,
z
f
a
r
]
[0,\mathrm{zfar}]
[0,zfar];
x
,
y
x,y
x,y被映射到了像平面上的坐标,其中图像中心在像平面上的坐标为
(
0
,
0
)
(0,0)
(0,0),图像边缘在像平面上的
x
x
x、
y
y
y坐标为
±
1
\pm 1
±1。同时,作者在结果的第四个元素保留了被映射前的
z
z
z。
函数ndc2pix的作用就是把像平面上的坐标转化为像素坐标(ndc = normalized device coordinates,详见这篇文章)。我们提到,ndc2pix(v, s)等价于(v + 1) / 2 * s - 0.5。首先把范围
[
−
1
,
1
]
[-1,1]
[−1,1]映射为
[
0
,
2
]
[0,2]
[0,2],再除以
2
2
2得
[
0
,
1
]
[0,1]
[0,1],乘
s
s
s(等于图像宽度或高度)就转化为了像素坐标,最后
−
0.5
-0.5
−0.5映射到像素中心。
❗️注意:我们有四个坐标系:世界坐标系、相机坐标系、像平面坐标系、图像坐标系,关系如图:
5. render和rendercuda
void forward::render(
const dim3 grid, dim3 block,
const uint2* ranges,
const uint32_t* point_list,
int w, int h,
const float2* means2d,
const float* colors,
const float4* conic_opacity,
float* final_t,
uint32_t* n_contrib,
const float* bg_color,
float* out_color)
{
rendercuda<num_channels> << <grid, block >> > (
ranges,
point_list,
w, h,
means2d,
colors,
conic_opacity,
final_t,
n_contrib,
bg_color,
out_color);
// 一个线程负责一个像素,一个block负责一个tile
}
// main rasterization method. collaboratively works on one tile per
// block, each thread treats one pixel. alternates between fetching
// and rasterizing data.
// "alternates between fetching and rasterizing data":
// 线程在读取数据(把数据从公用显存拉到block自己的显存)和进行计算之间来回切换,
// 使得线程们可以共同读取gaussian数据。
// 这样做的原因是block共享内存比公共显存快得多。
template <uint32_t channels> // channels取3,即rgb三个通道
__global__ void __launch_bounds__(block_x * block_y)
rendercuda(
const uint2* __restrict__ ranges, // 每个tile对应排过序的数组中的哪一部分
const uint32_t* __restrict__ point_list, // 按tile、深度排序后的gaussian id列表
int w, int h, // 图像宽高
const float2* __restrict__ points_xy_image, // 图像上每个gaussian中心的2d坐标
const float* __restrict__ features, // rgb颜色
const float4* __restrict__ conic_opacity, // 解释过了
float* __restrict__ final_t, // 最终的透光率
uint32_t* __restrict__ n_contrib,
// 多少个gaussian对该像素的颜色有贡献(用于反向传播时判断各个gaussian有没有梯度)
const float* __restrict__ bg_color, // 背景颜色
float* __restrict__ out_color) // 渲染结果(图片)
{
// identify current tile and associated min/max pixel range.
auto block = cg::this_thread_block();
uint32_t horizontal_blocks = (w + block_x - 1) / block_x; // x方向上tile的个数
uint2 pix_min = { block.group_index().x * block_x, block.group_index().y * block_y };
// 我负责的tile的坐标较小的那个角的坐标
uint2 pix_max = { min(pix_min.x + block_x, w), min(pix_min.y + block_y , h) };
// 我负责的tile的坐标较大的那个角的坐标
uint2 pix = { pix_min.x + block.thread_index().x, pix_min.y + block.thread_index().y };
// 我负责哪个像素
uint32_t pix_id = w * pix.y + pix.x;
// 我负责的像素在整张图片中排行老几
float2 pixf = { (float)pix.x, (float)pix.y }; // pix的浮点数版本
// check if this thread is associated with a valid pixel or outside.
bool inside = pix.x < w && pix.y < h; // 看看我负责的像素有没有跑到图像外面去
// done threads can help with fetching, but don't rasterize
bool done = !inside;
// load start/end range of ids to process in bit sorted list.
uint2 range = ranges[block.group_index().y * horizontal_blocks + block.group_index().x];
const int rounds = ((range.y - range.x + block_size - 1) / block_size);
// block_size = 16 * 16 = 256
// 我要把任务分成rounds批,每批处理block_size个gaussians
// 每一批,每个线程负责读取一个gaussian的信息,
// 所以该block的256个线程每一批就可以读取256个gaussian的信息
int todo = range.y - range.x; // 我要处理的gaussian个数
// allocate storage for batches of collectively fetched data.
// __shared__: 同一block中的线程共享的内存
__shared__ int collected_id[block_size];
__shared__ float2 collected_xy[block_size];
__shared__ float4 collected_conic_opacity[block_size];
// initialize helper variables
float t = 1.0f; // t = transmittance,透光率
uint32_t contributor = 0; // 多少个gaussian对该像素的颜色有贡献
uint32_t last_contributor = 0; // 比contributor慢半拍的变量
float c[channels] = { 0 }; // 渲染结果
// iterate over batches until all done or range is complete
for (int i = 0; i < rounds; i++, todo -= block_size)
{
// end if entire block votes that it is done rasterizing
int num_done = __syncthreads_count(done);
// 它首先具有__syncthreads的功能(让所有线程回到同一个起跑线上),
// 并且返回对于多少个线程来说done是true。
if (num_done == block_size)
break; // 全干完了,收工
// collectively fetch per-gaussian data from global to shared
// 由于当前block的线程要处理同一个tile,所以它们面对的gaussians也是相同的
// 因此合作读取block_size条的数据。
// 之所以分批而不是一次读完可能是因为block的共享内存空间有限。
int progress = i * block_size + block.thread_rank();
if (range.x + progress < range.y) // 我还有没有活干
{
// 读取我负责的gaussian信息
int coll_id = point_list[range.x + progress];
collected_id[block.thread_rank()] = coll_id;
collected_xy[block.thread_rank()] = points_xy_image[coll_id];
collected_conic_opacity[block.thread_rank()] = conic_opacity[coll_id];
}
block.sync(); // 这下collected_*** 数组就被填满了
// iterate over current batch
for (int j = 0; !done && j < min(block_size, todo); j++)
{
// keep track of current position in range
contributor++;
// 下面计算当前gaussian的不透明度
// resample using conic matrix (cf. "surface
// splatting" by zwicker et al., 2001)
float2 xy = collected_xy[j]; // gaussian中心
float2 d = { xy.x - pixf.x, xy.y - pixf.y };
// 该像素到gaussian中心的位移向量
float4 con_o = collected_conic_opacity[j];
float power = -0.5f * (con_o.x * d.x * d.x + con_o.z * d.y * d.y) - con_o.y * d.x * d.y;
// 二维高斯分布公式的指数部分(见补充说明)
if (power > 0.0f)
continue;
// eq. (2) from 3d gaussian splatting paper.
// obtain alpha by multiplying with gaussian opacity
// and its exponential falloff from mean.
// avoid numerical instabilities (see paper appendix).
float alpha = min(0.99f, con_o.w * exp(power));
// gaussian对于这个像素点来说的不透明度
// 注意con_o.w是”opacity“,是gaussian整体的不透明度
if (alpha < 1.0f / 255.0f) // 不透明度太小,不渲染
continue;
float test_t = t * (1 - alpha); // 透光率是累乘
if (test_t < 0.0001f)
{ // 当透光率很低的时候,就不继续渲染了(反正渲染了也看不见)
done = true;
continue;
}
// eq. (3) from 3d gaussian splatting paper.
for (int ch = 0; ch < channels; ch++)
c[ch] += features[collected_id[j] * channels + ch] * alpha * t;
// 计算当前gaussian对像素颜色的贡献
t = test_t; // 更新透光率
// keep track of last range entry to update this
// pixel.
last_contributor = contributor;
}
}
// all threads that treat valid pixel write out their final
// rendering data to the frame and auxiliary buffers.
if (inside)
{
final_t[pix_id] = t;
n_contrib[pix_id] = last_contributor;
for (int ch = 0; ch < channels; ch++)
out_color[ch * h * w + pix_id] = c[ch] + t * bg_color[ch];
// 把渲染出来的像素值写进out_color
}
}
补充说明
二维高斯分布的指数部分为
−
1
2
d
t
σ
−
1
d
-\frac{1}{2}\boldsymbol{d}^t\sigma^{-1}\boldsymbol{d}
−21dtσ−1d其中
d
\boldsymbol{d}
d就是代码中的d(像素到gaussian中心的位移向量),
σ
−
1
=
[
c
o
n
_
o
.
x
c
o
n
_
o
.
y
c
o
n
_
o
.
y
c
o
n
_
o
.
z
]
\sigma^{-1}=\begin{bmatrix}\mathtt{con\_o.x}&\mathtt{con\_o.y}\\\mathtt{con\_o.y}&\mathtt{con\_o.z}\end{bmatrix}
σ−1=[con_o.xcon_o.ycon_o.ycon_o.z]。把矩阵乘开就得到了代码中的-0.5f * (con_o.x * d.x * d.x + con_o.z * d.y * d.y) - con_o.y * d.x * d.y。
至于为什么不乘前面的常数
1
(
2
π
)
n
2
∣
σ
∣
1
2
\frac{1}{(2\pi)^{\frac{n}{2}}|\sigma|^{\frac{1}{2}}}
(2π)2n∣σ∣211呢?因为con_o.w(即opacity)是可学习的参数,这个常量可以包括进去。



发表评论