目录
无锚框目标检测算法 anchor-free detectors
-
目标检测的基本范式
-
什么是目标检测
-
目标检测 vs 图像分类
-
-
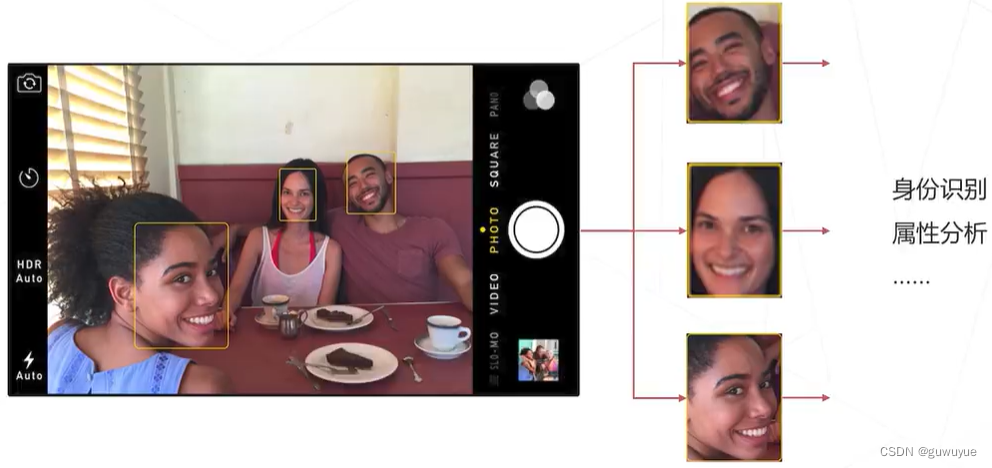
目标检测 in 人脸识别
-
目标检测 in 智慧城市



-
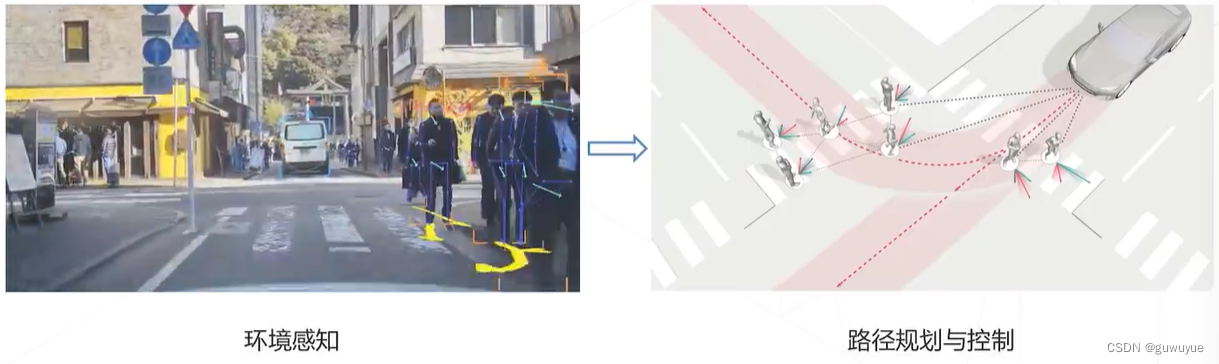
目标检测 in 自动驾驶
-
目标检测 in 下游视觉任务
-
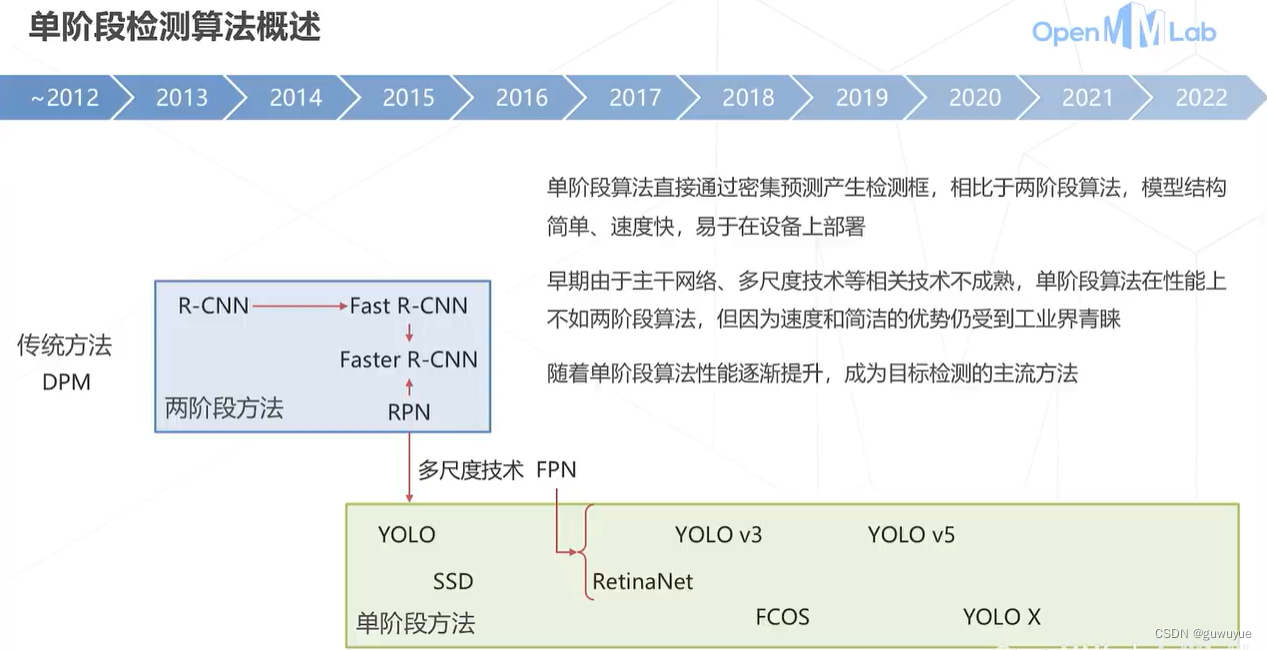
目标检测技术的演进
-
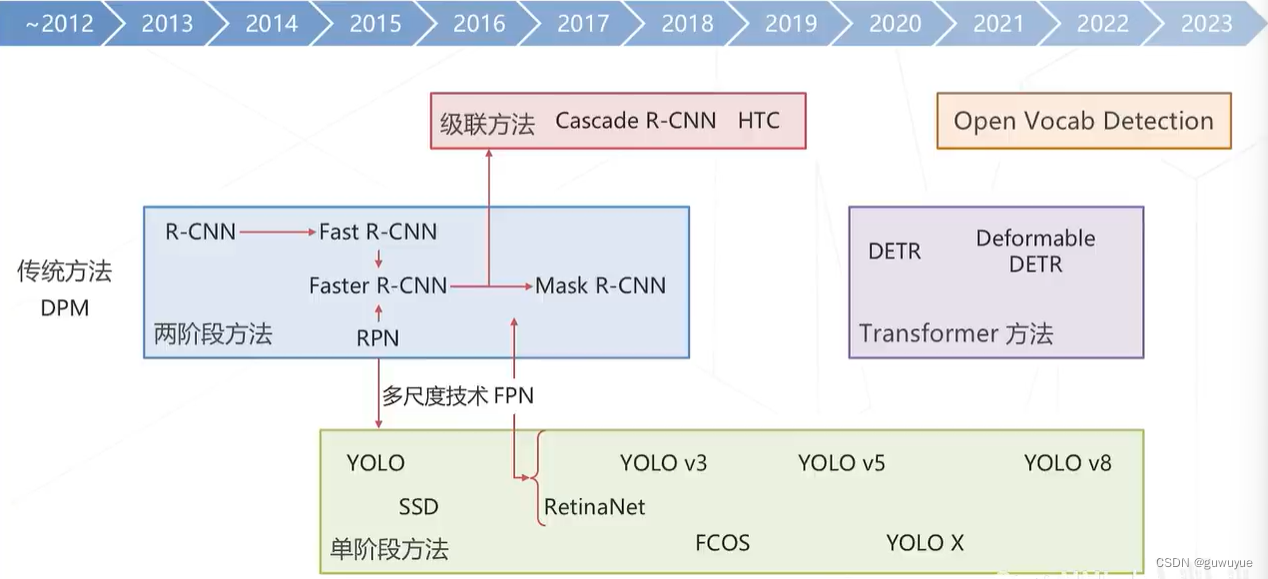
-
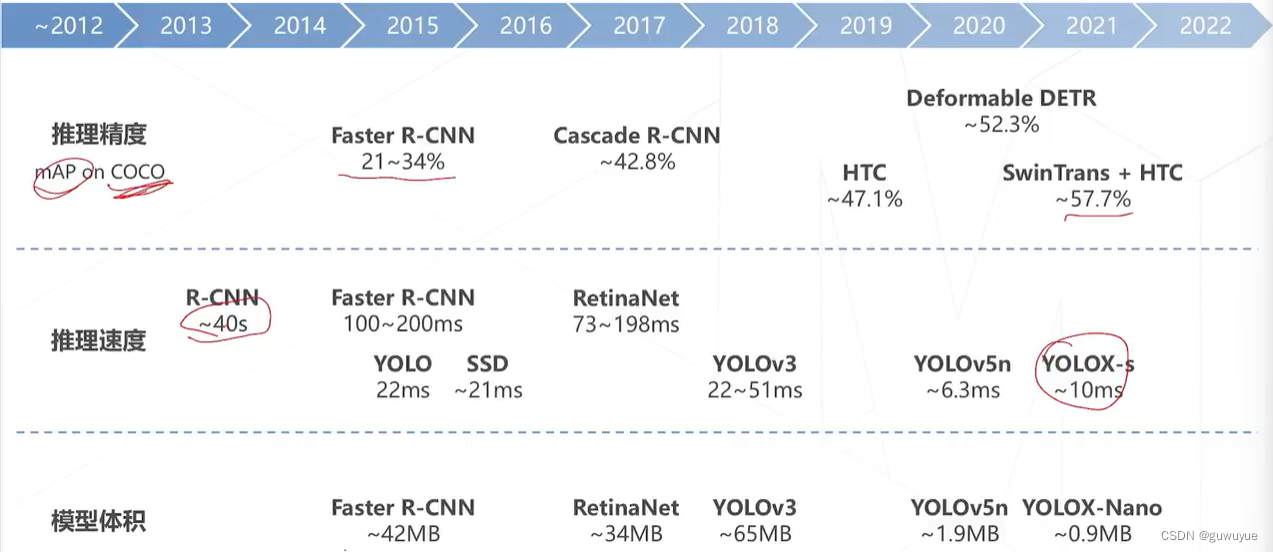
-
基础知识
-
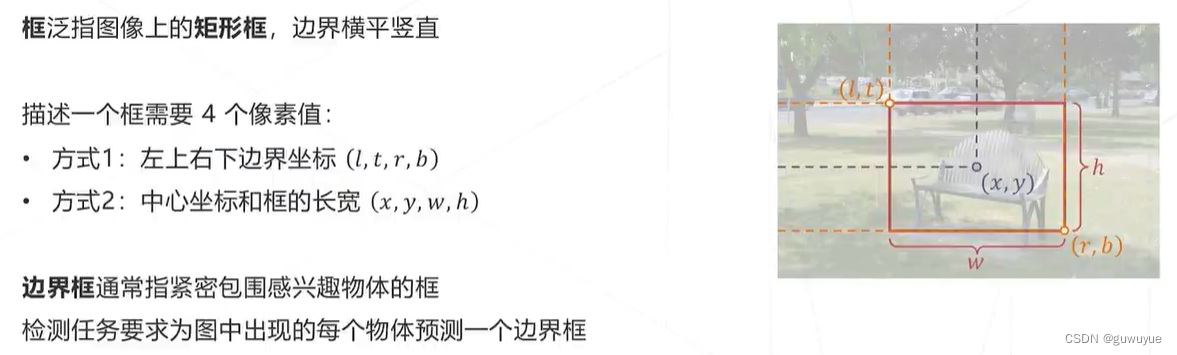
框、边界框(bounding box)
-
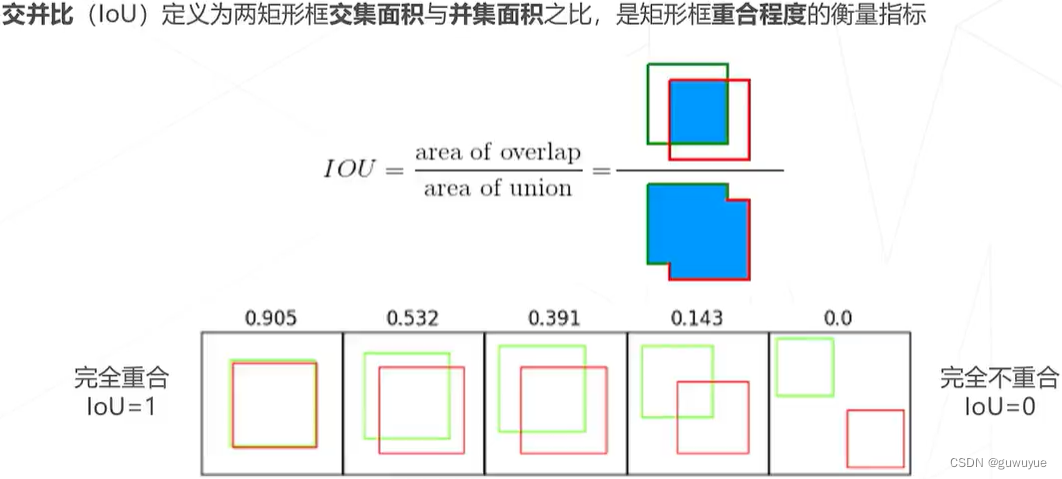
交并比 intersection over union
-
-
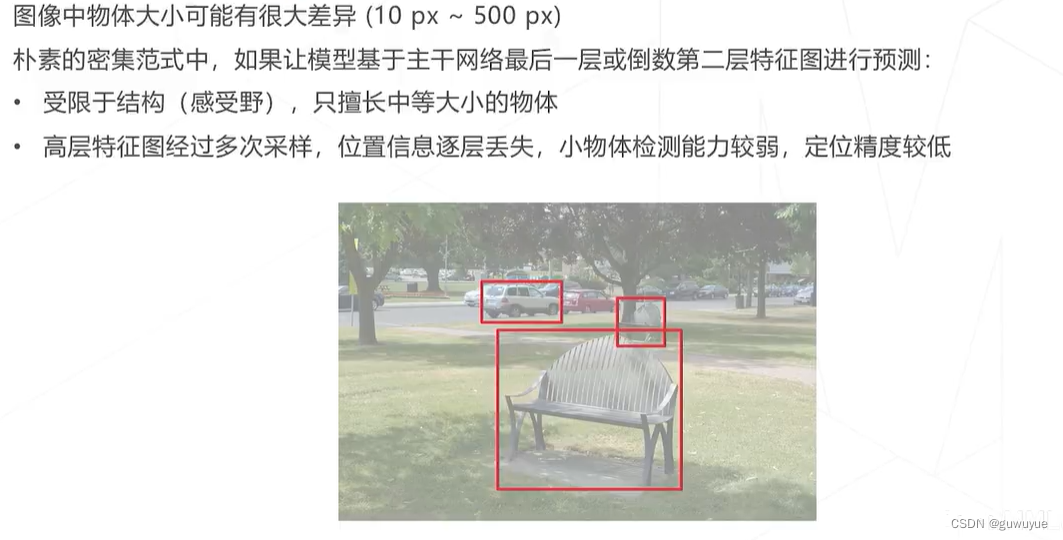
目标检测的基本思路(从滑窗到密集预测)
-
检测问题的难点
-
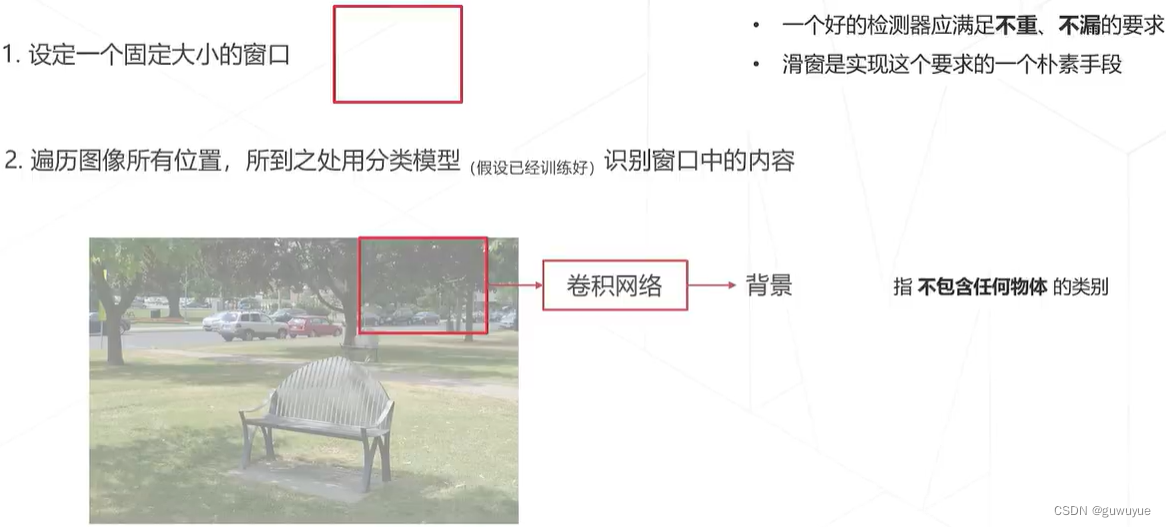
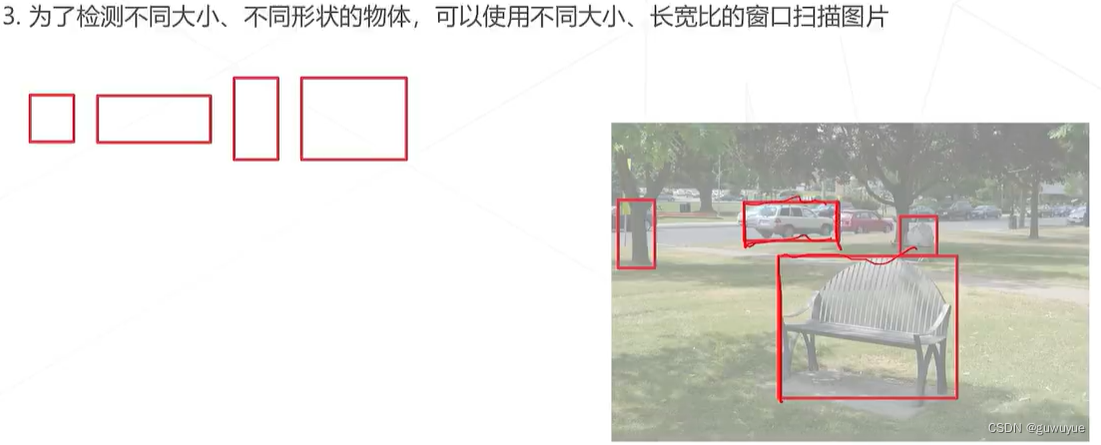
滑窗 sliding widow
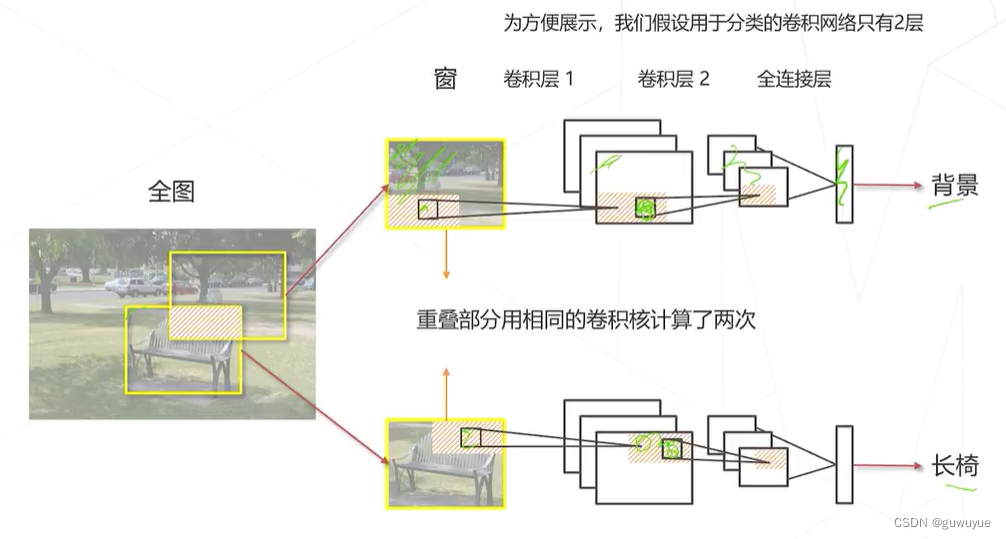
- 滑窗的效率问题
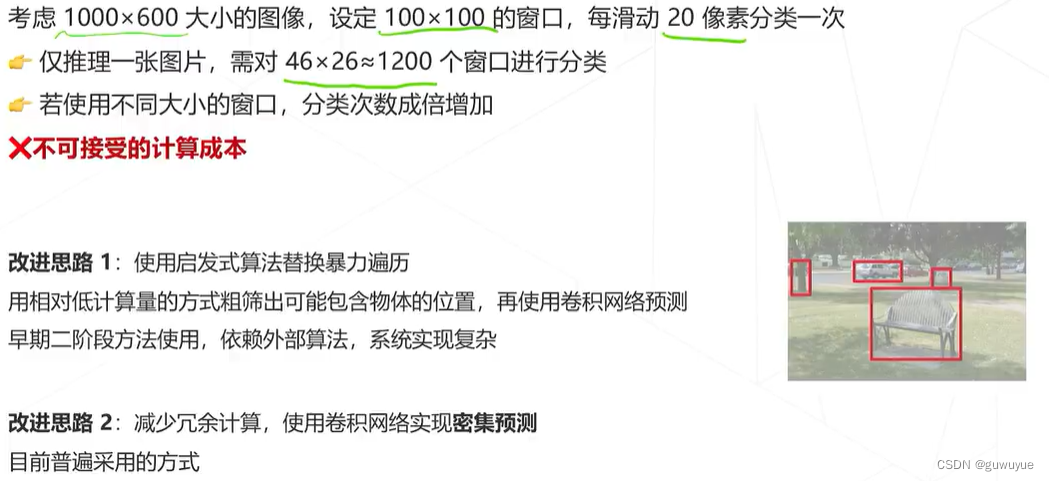
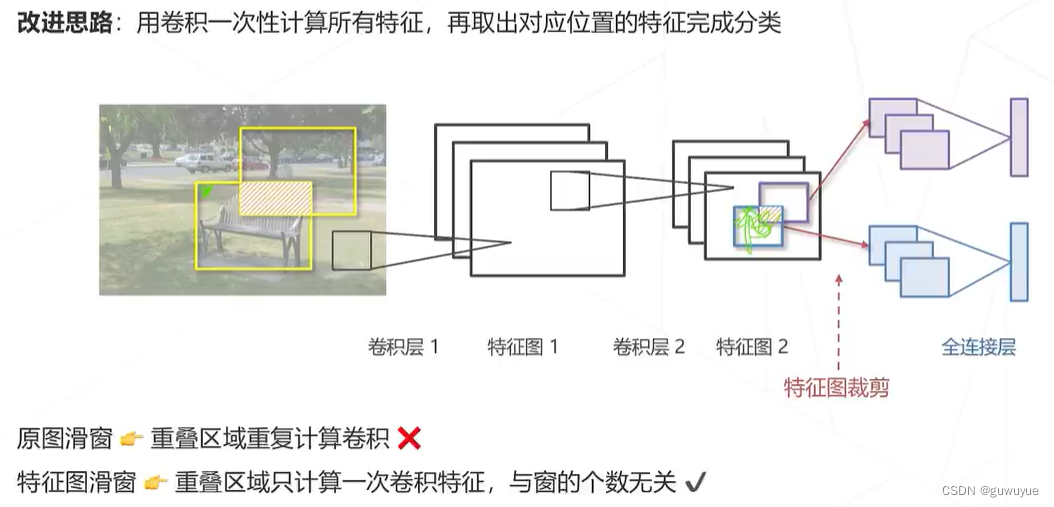
- 改进思路2:分析滑窗中的重复计算
- 消除滑窗中的重复计算
-
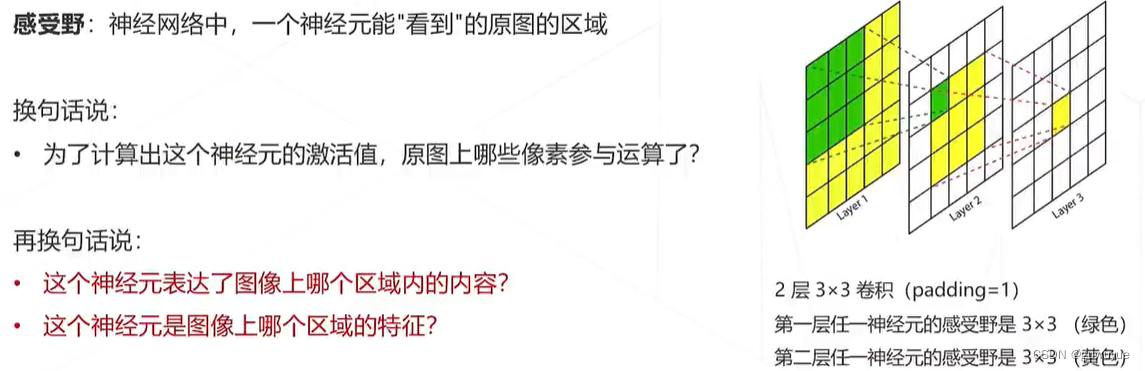
感受野(receptive field)
-
-
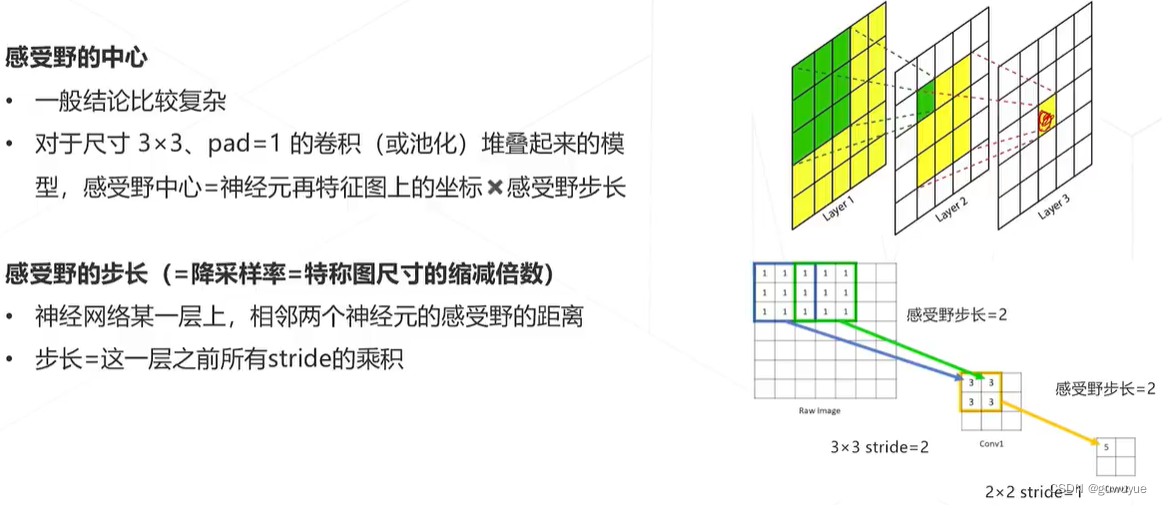
感受野的中心和步长
-
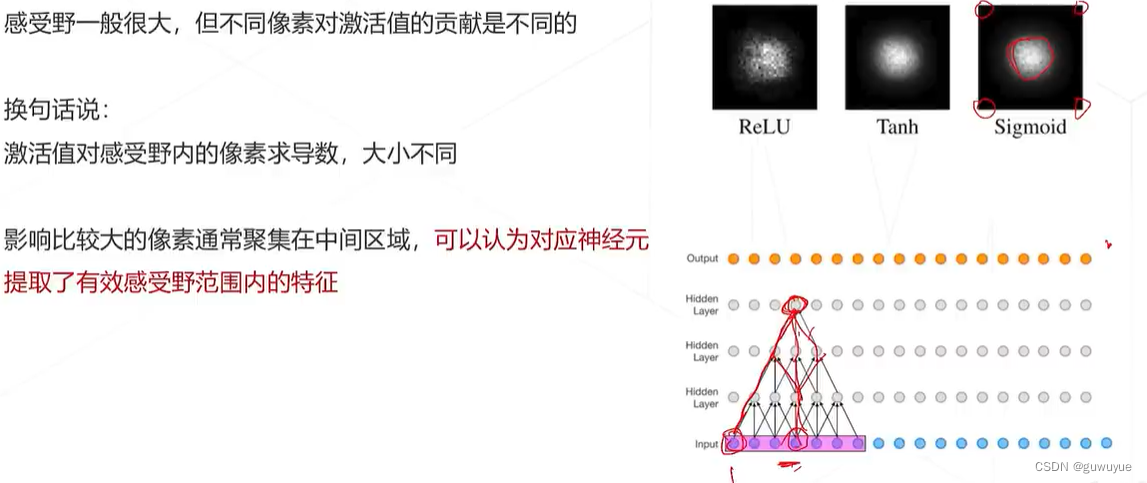
- 有效感受野(effective rf)
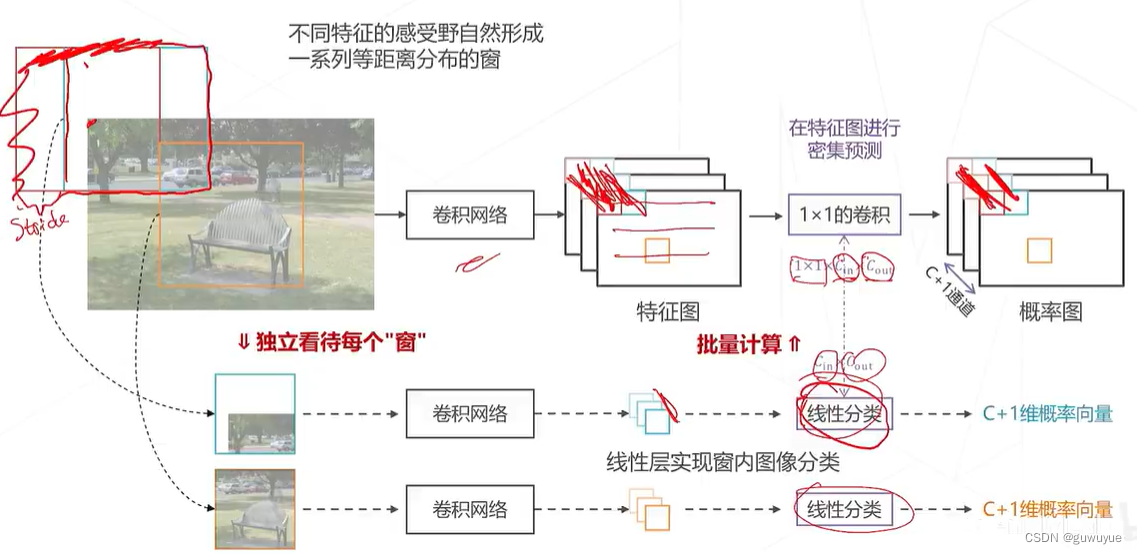
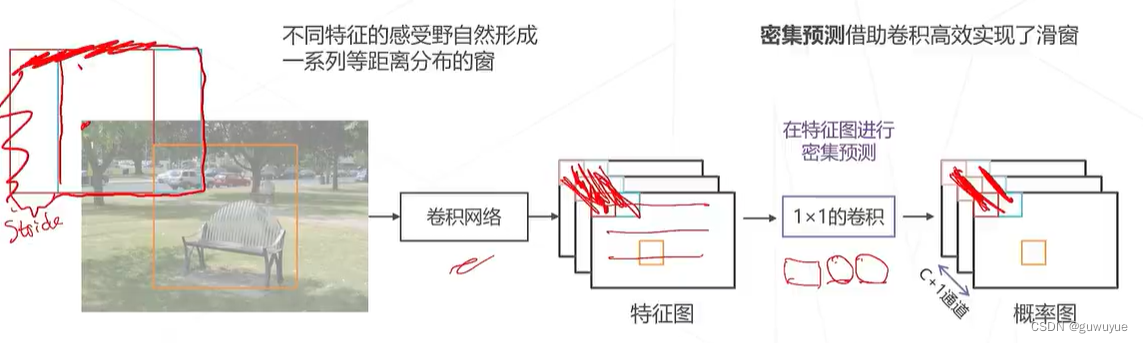
- 在特征图上进行密集预测
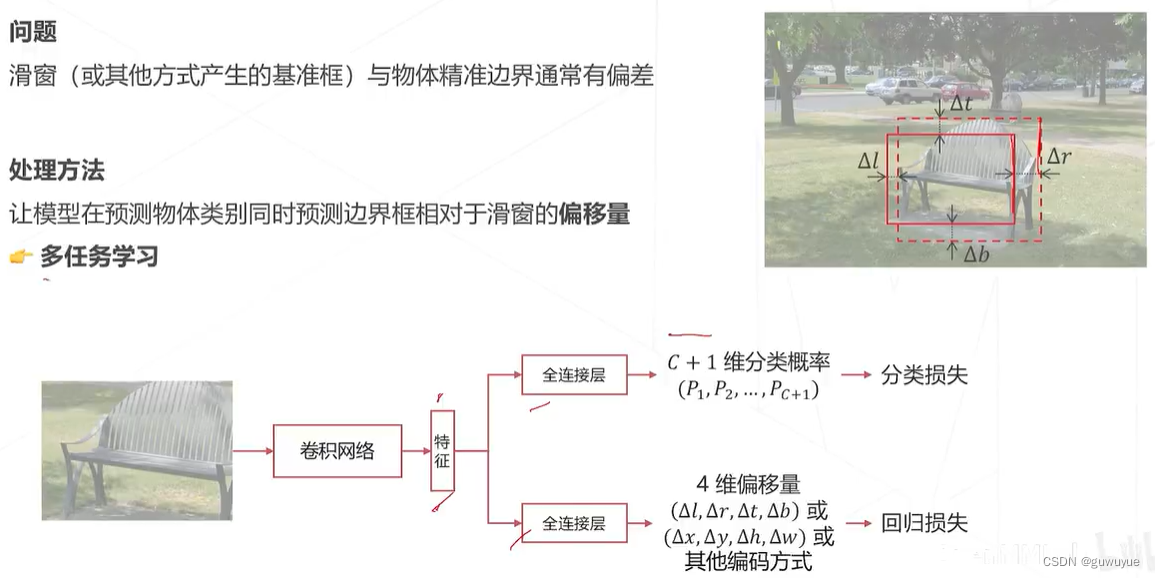
- 边界框回归 bounding box regression
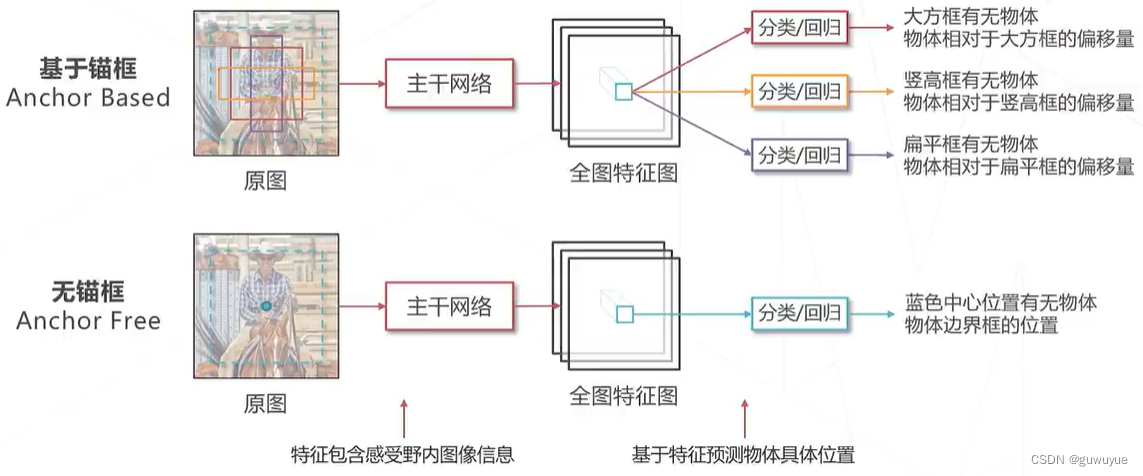
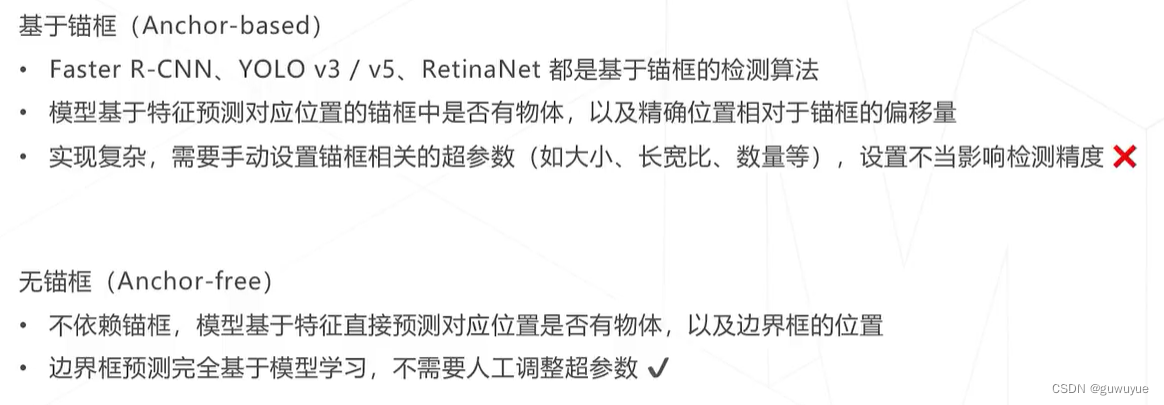
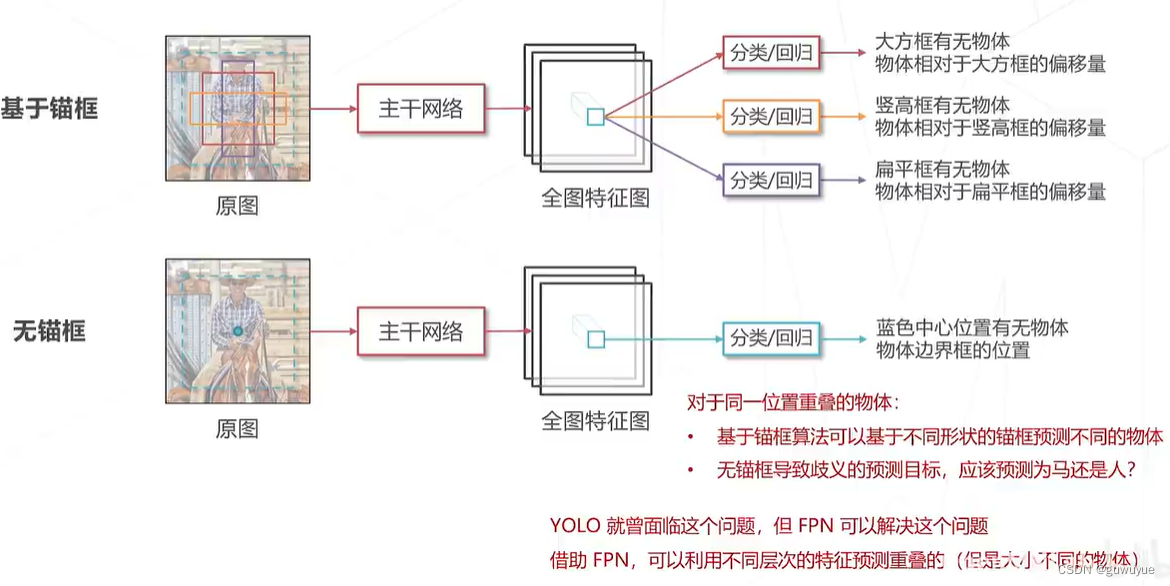
- 基于锚框 vs 无锚框
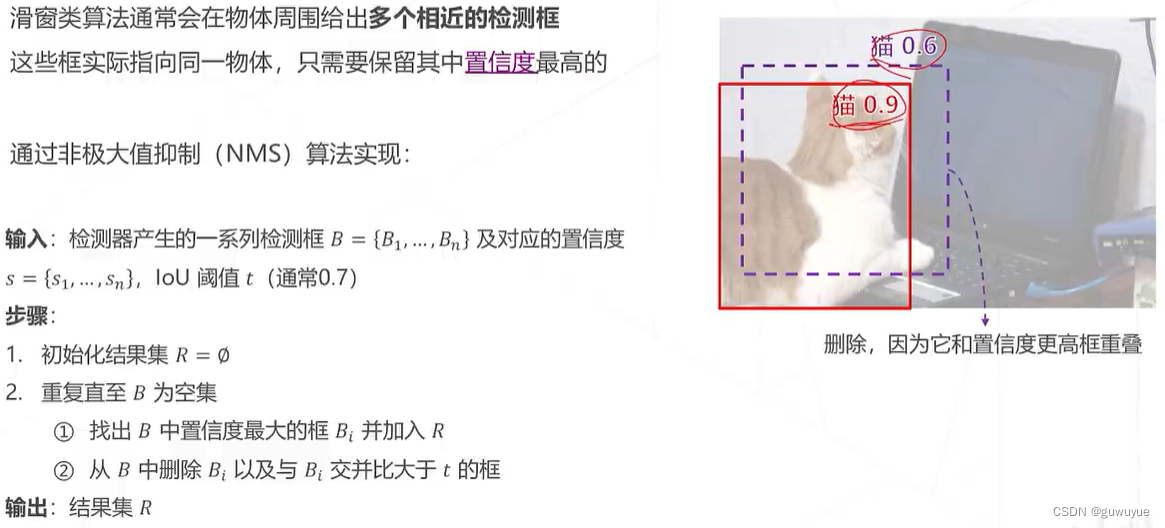
- 非极大值抑制 non-maximum suppression
-
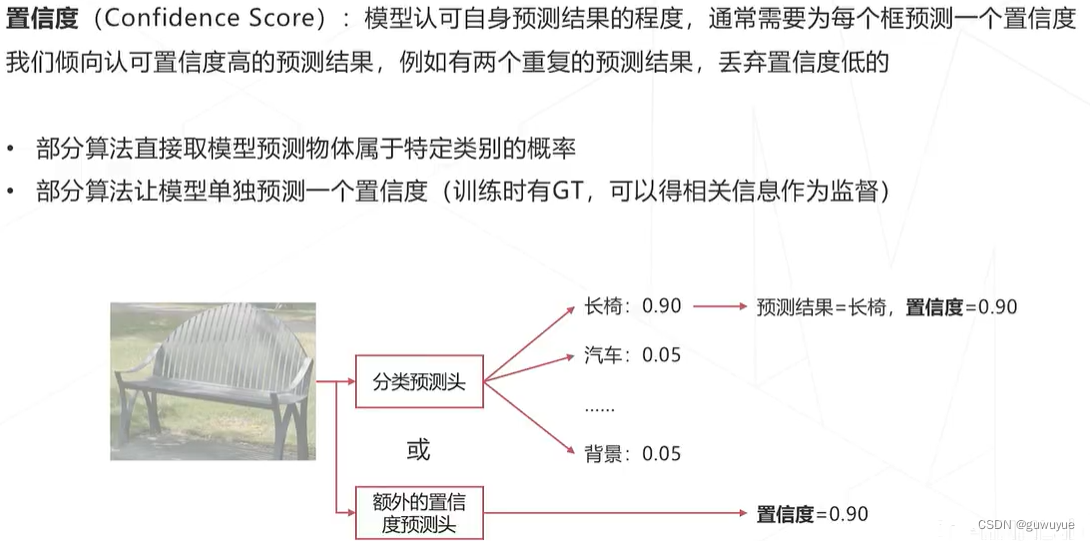
置信度 confidence score
-
-
-
使用卷积实现密集预测
- 使用密集预测模型进行推理
- 基本流程:
- 用模型做密集预测,得到预测图,每个位置包含类别概率、边界框回归的预测结果
- 保留预测类别不是背景的“框”
- 基于“框”中心,和边界框回归结果,进行边界框解码
- 后处理:非极大值抑制(non-maximum suppression)
- 基本流程:
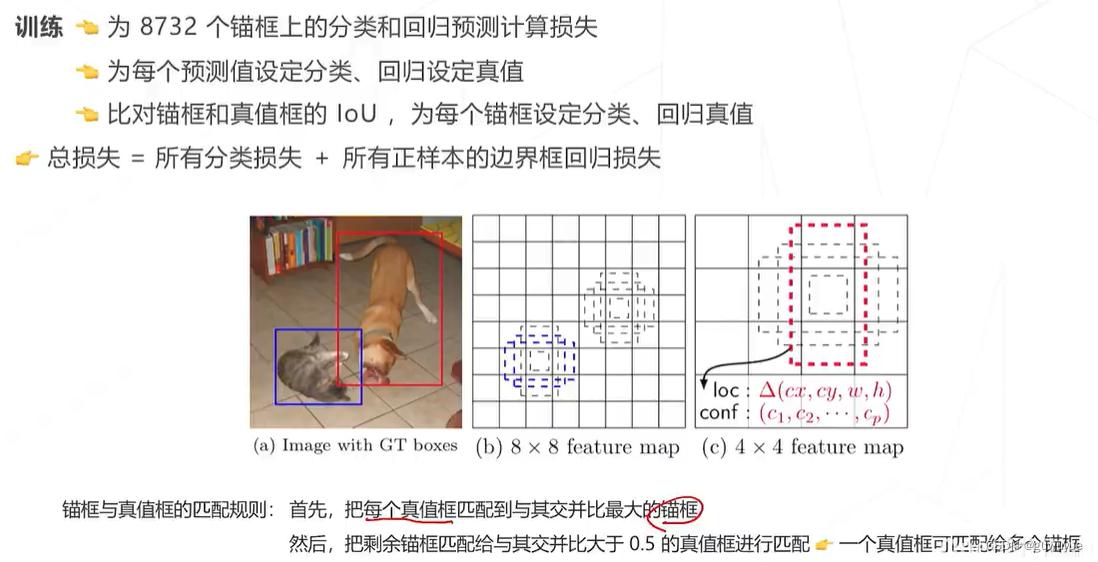
- 如何训练
- 密集预测模型的训练
-
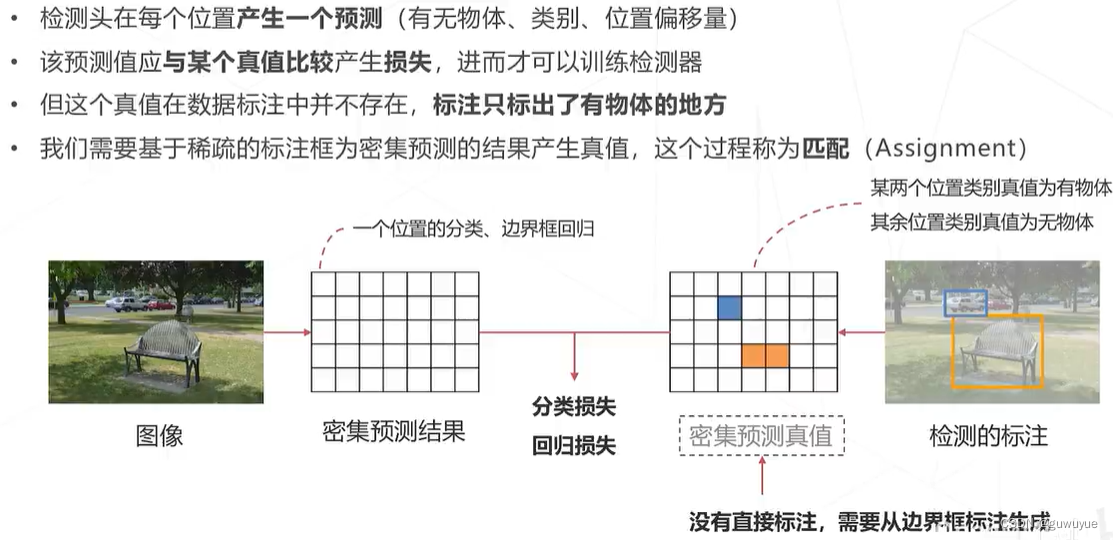
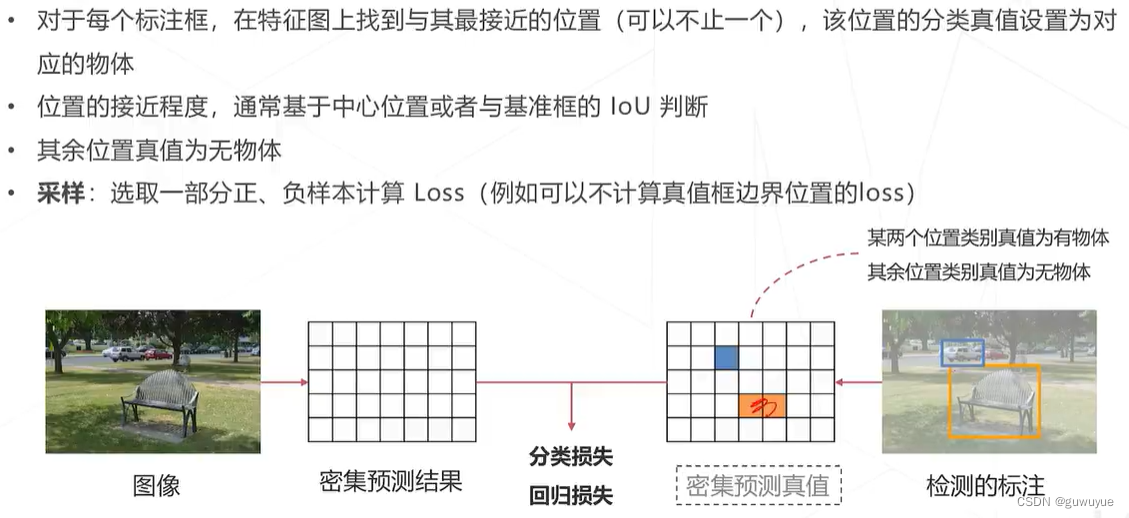
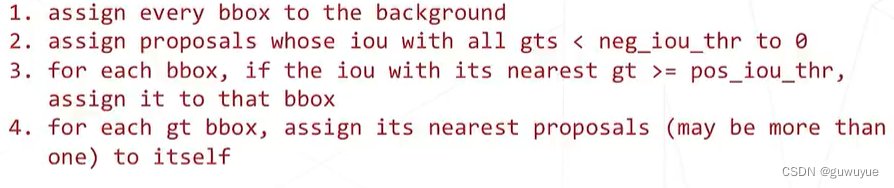
匹配的基本思路
-
-
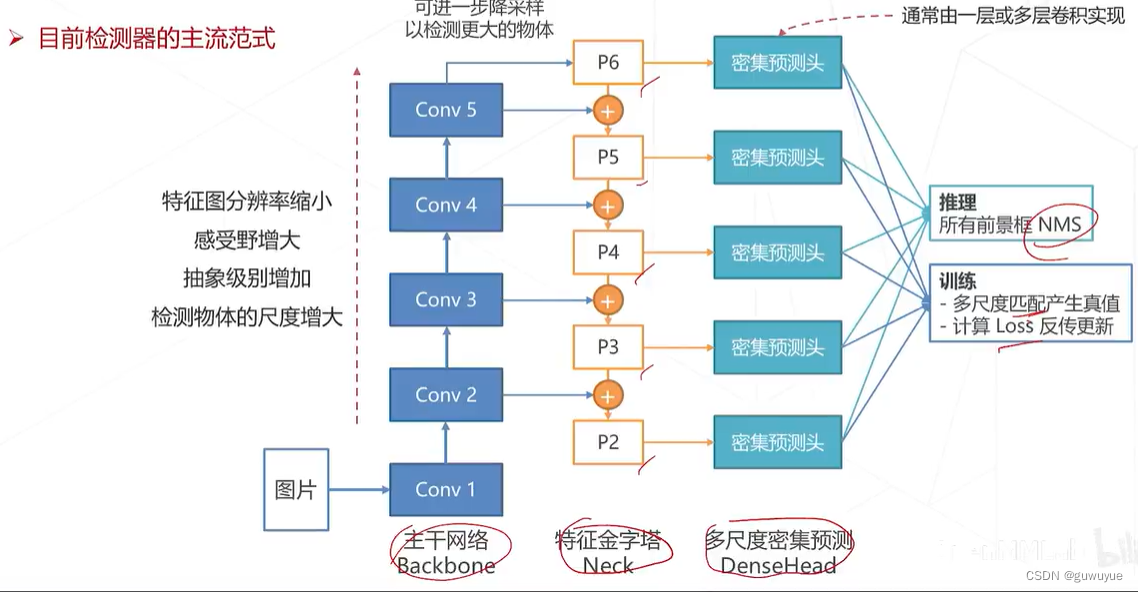
密集预测的基本范式
-
- 密集预测范式的改进:多尺度预测
- 如何处理尺度问题:
- 使用密集预测模型进行推理
-

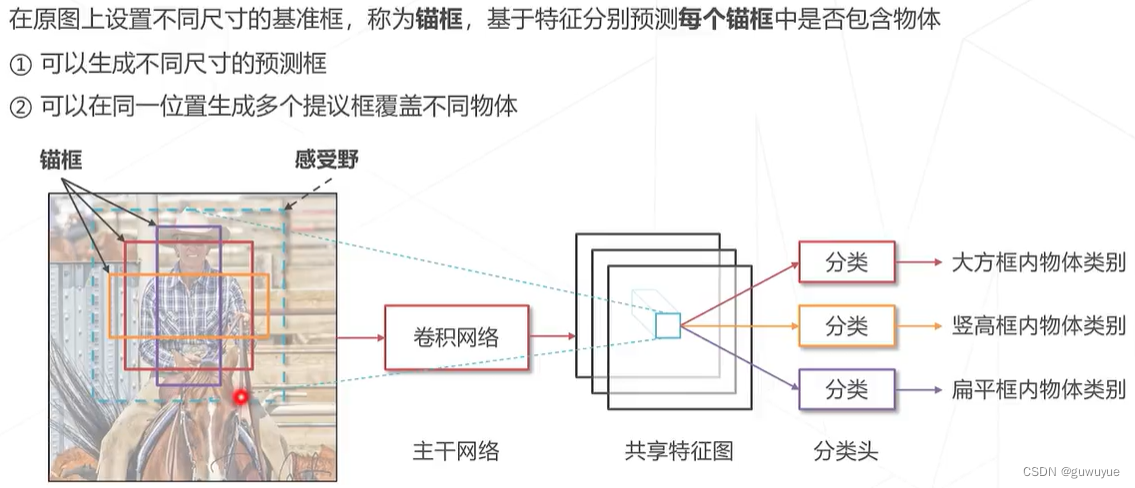
- 锚框
- 基于锚框anchor
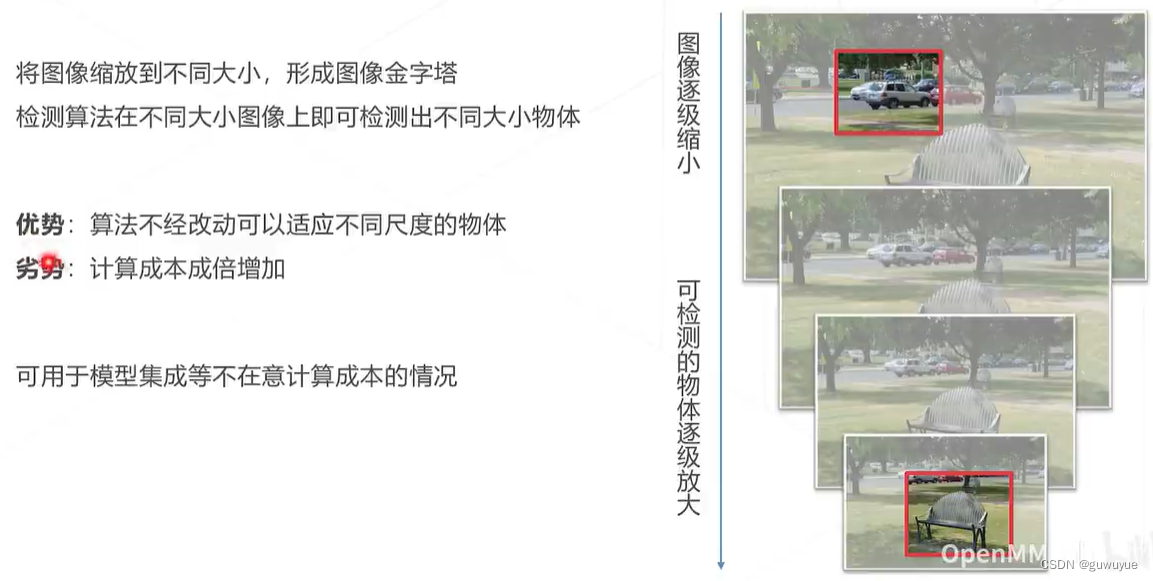
- 图像金字塔 image pyramid
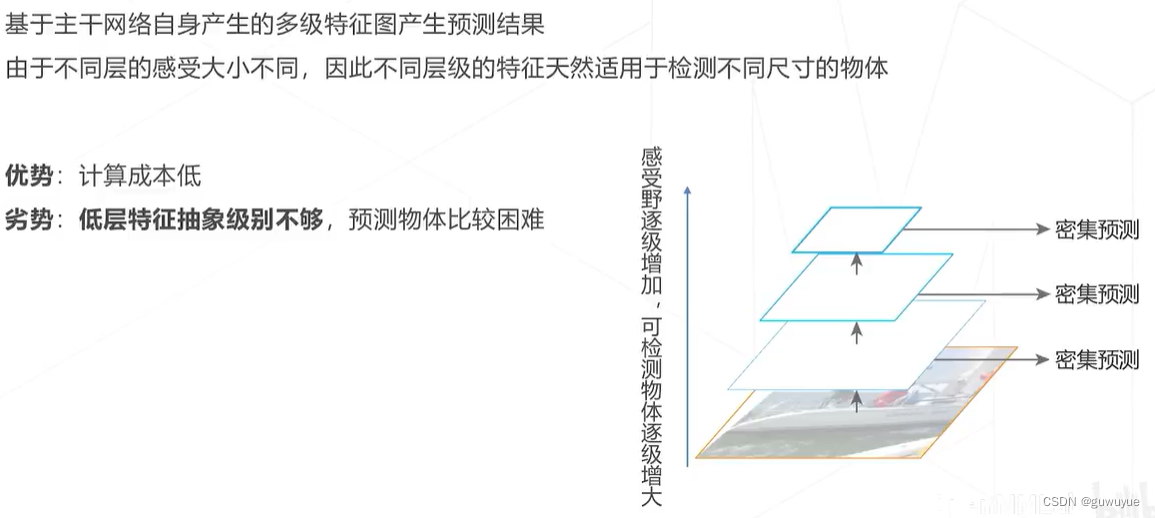
- 基于层次化特征
- 特征金字塔网络 feature pyramid network 2016
- 多尺度的密集预测
- 基于锚框anchor
-
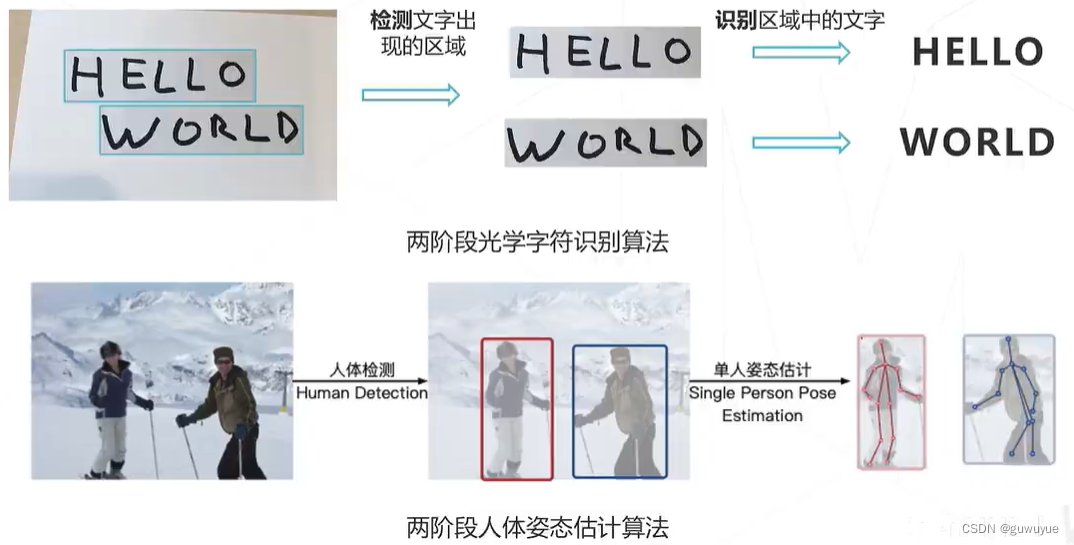
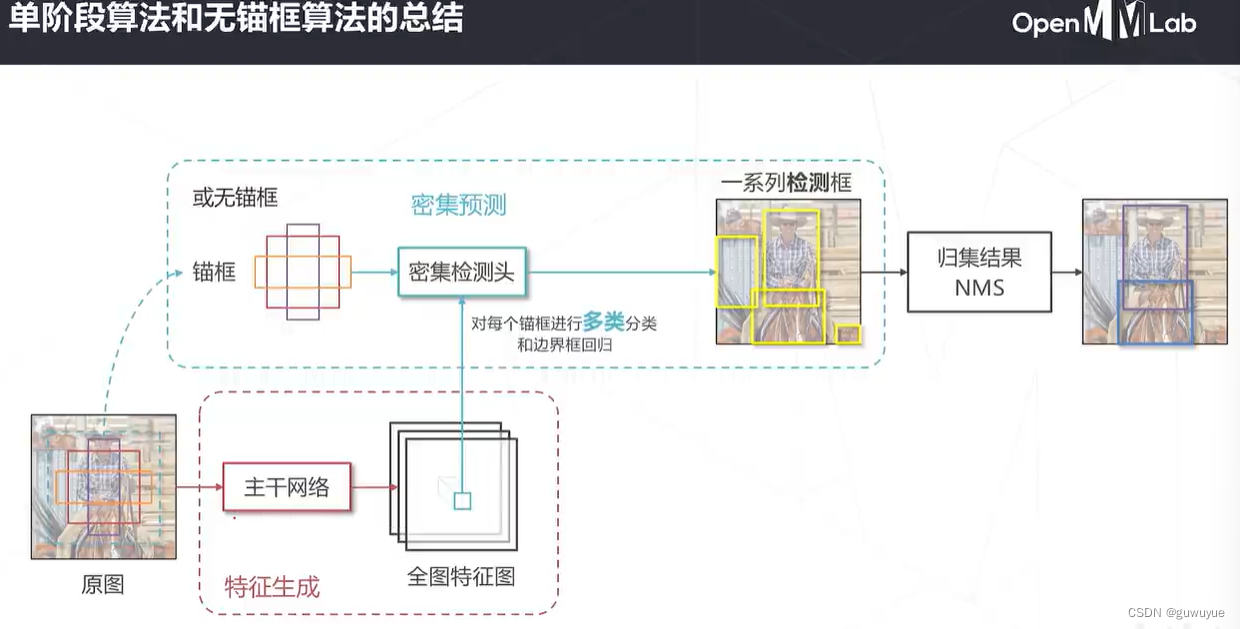
单阶段 & 无锚框检测器 选讲
- rpn(region proposal network 2015)
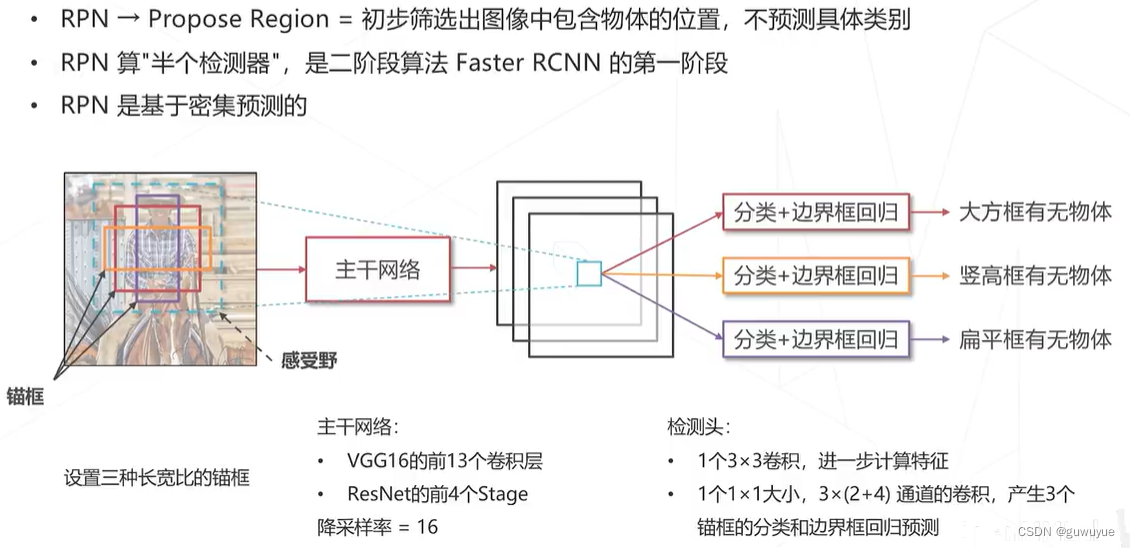
-
rpn的主干网络
-

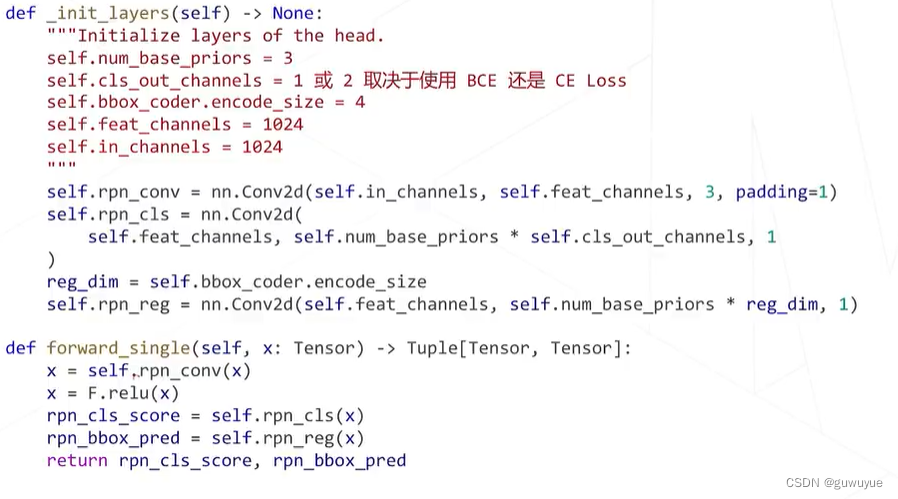
- 代码
-
-
-
基于iou的匹配
-
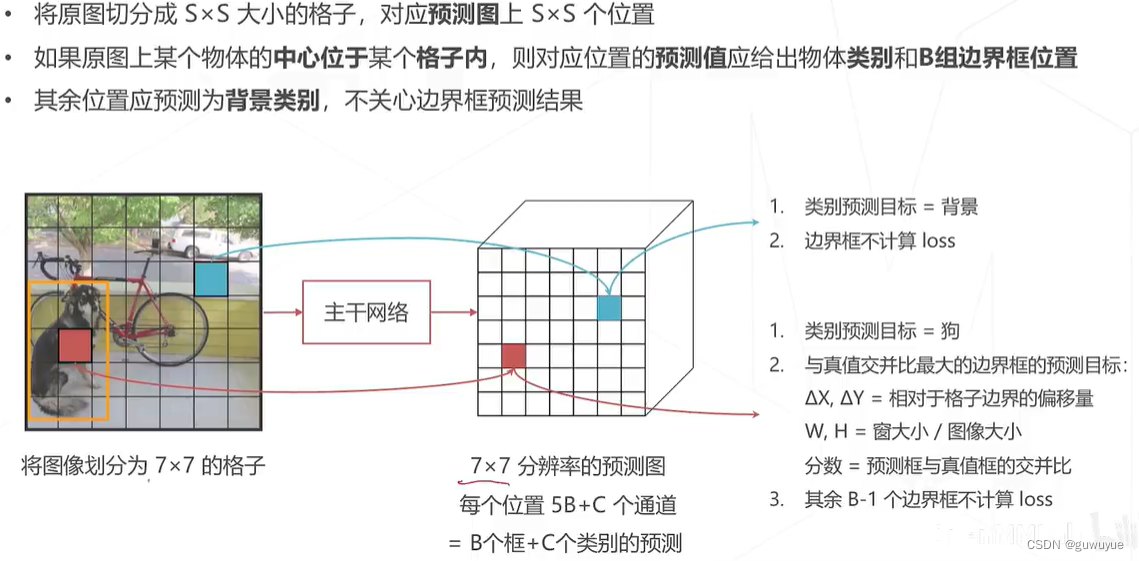
- yolo:you only look once 2015
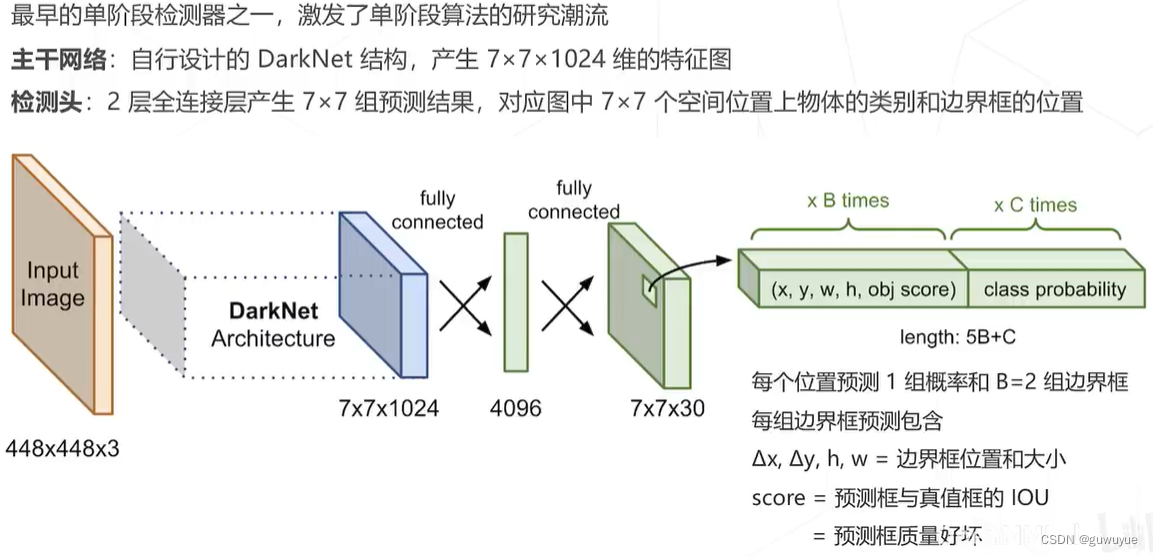
-
yolo的匹配与框编码
-
-
yolo的损失函数
-
-
yolo的优点和缺点
-
-
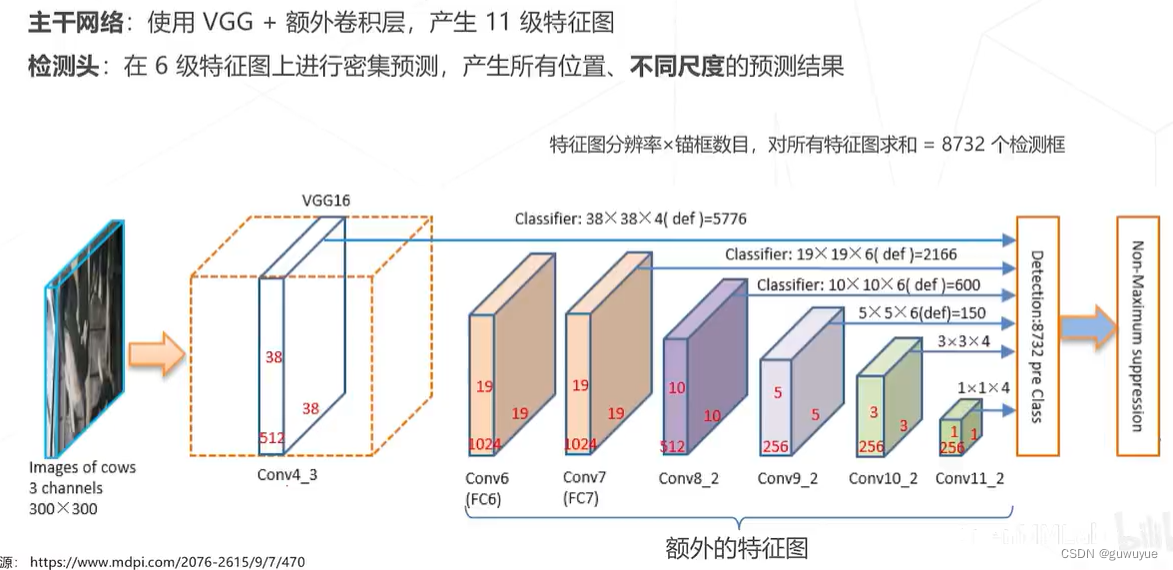
ssd:single shot multibox detector 2016
- ssd的匹配规则
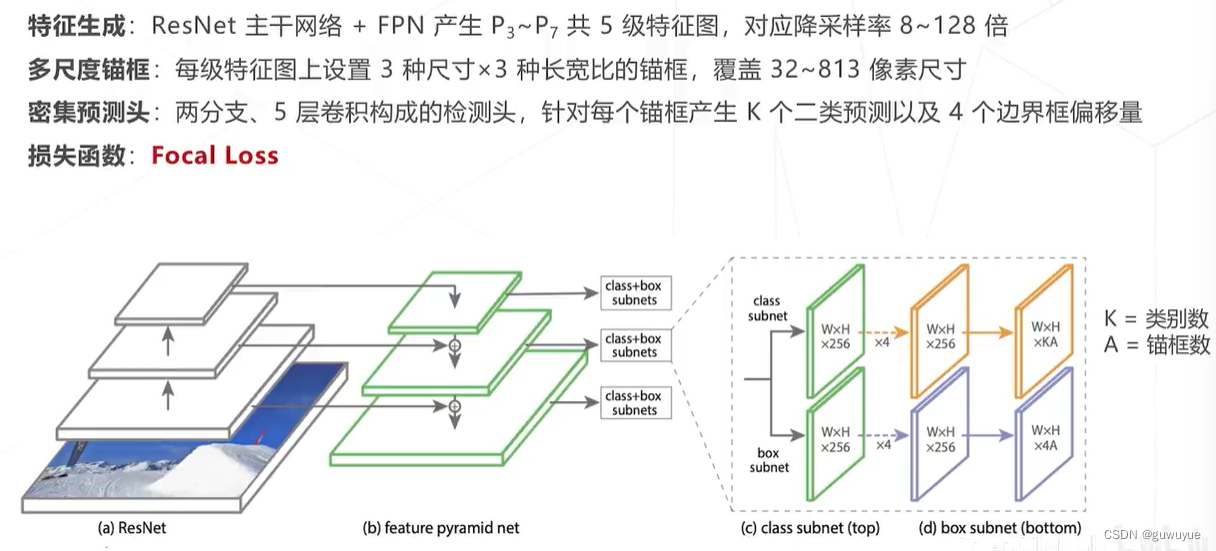
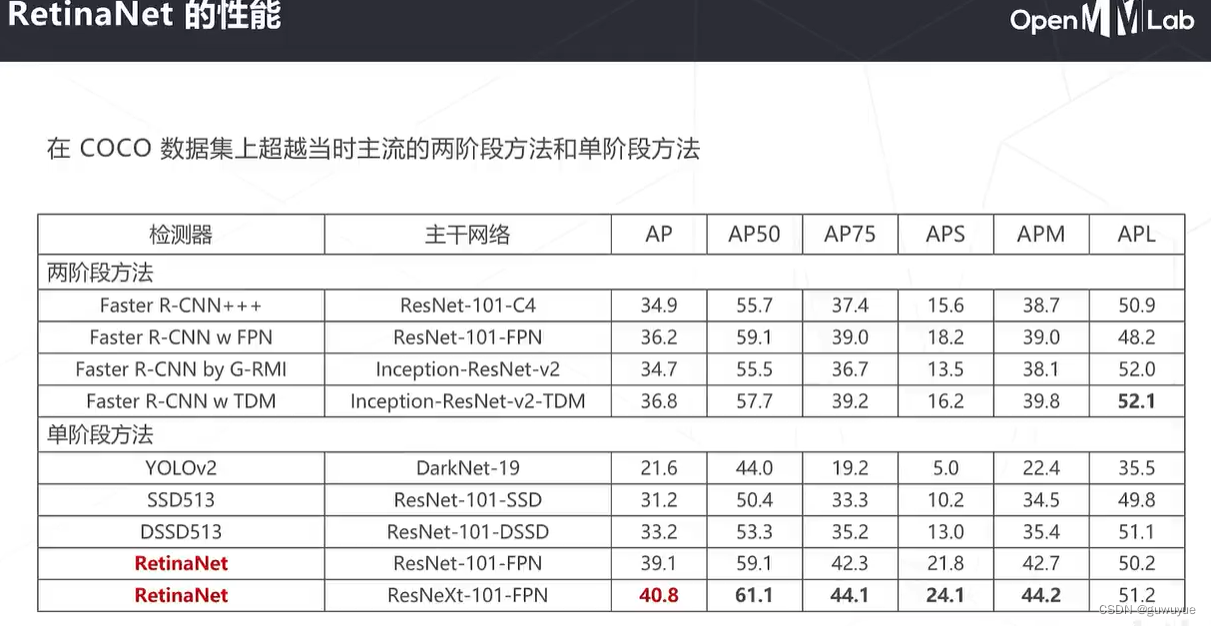
- retinanet 2017
-
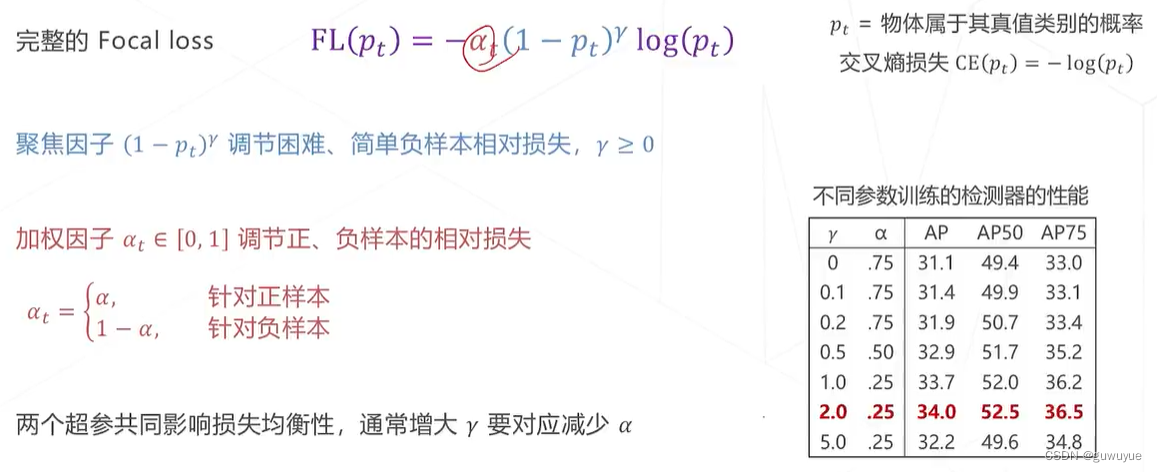
单阶段算法面临的正负样本不均衡问题

-
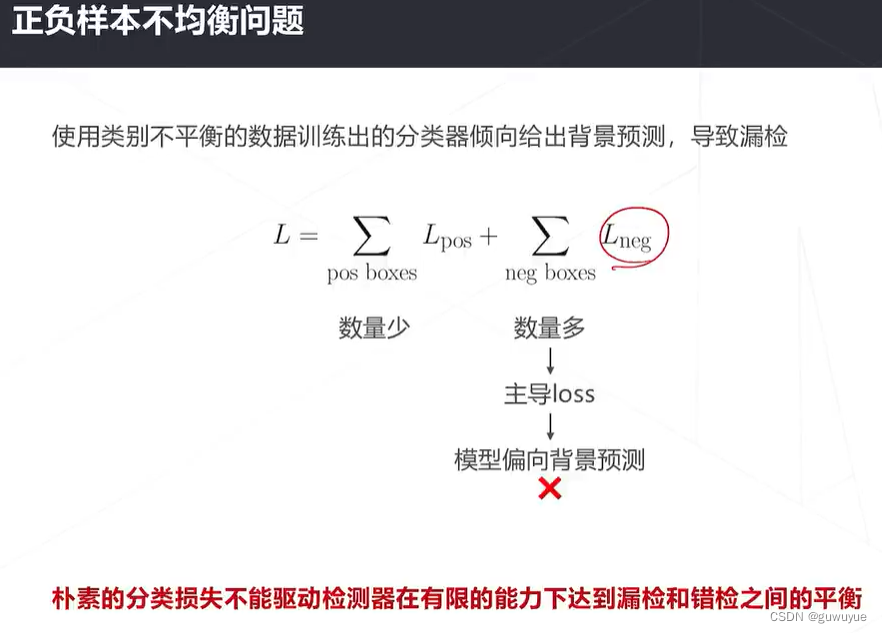
-
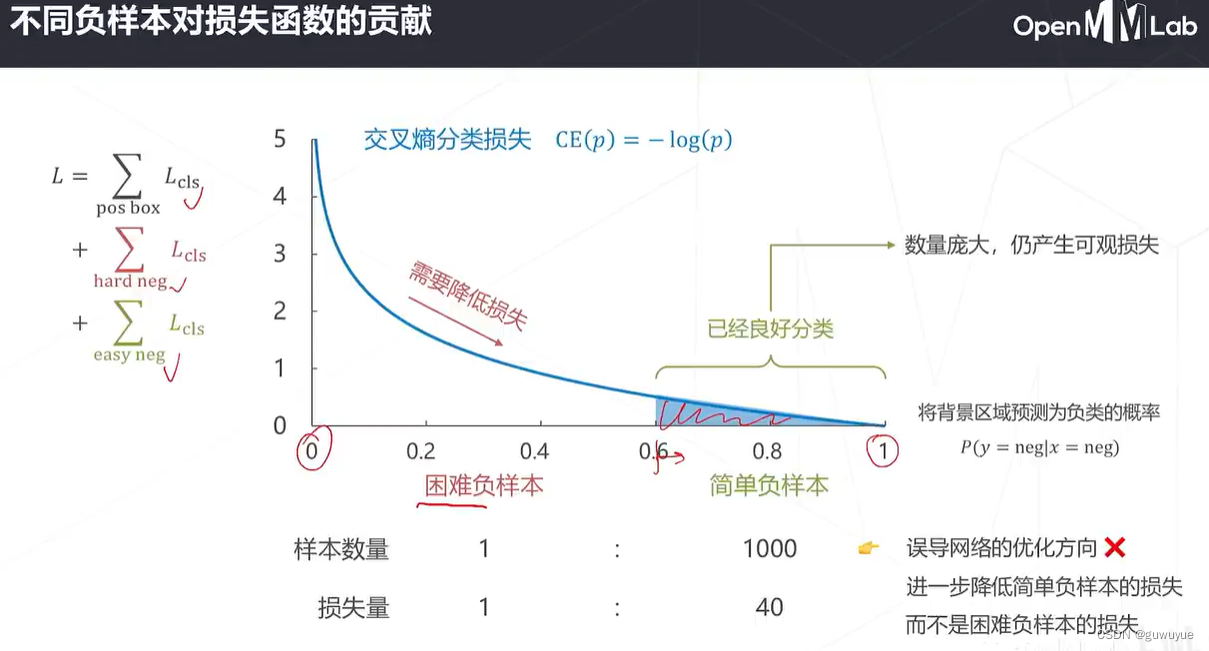
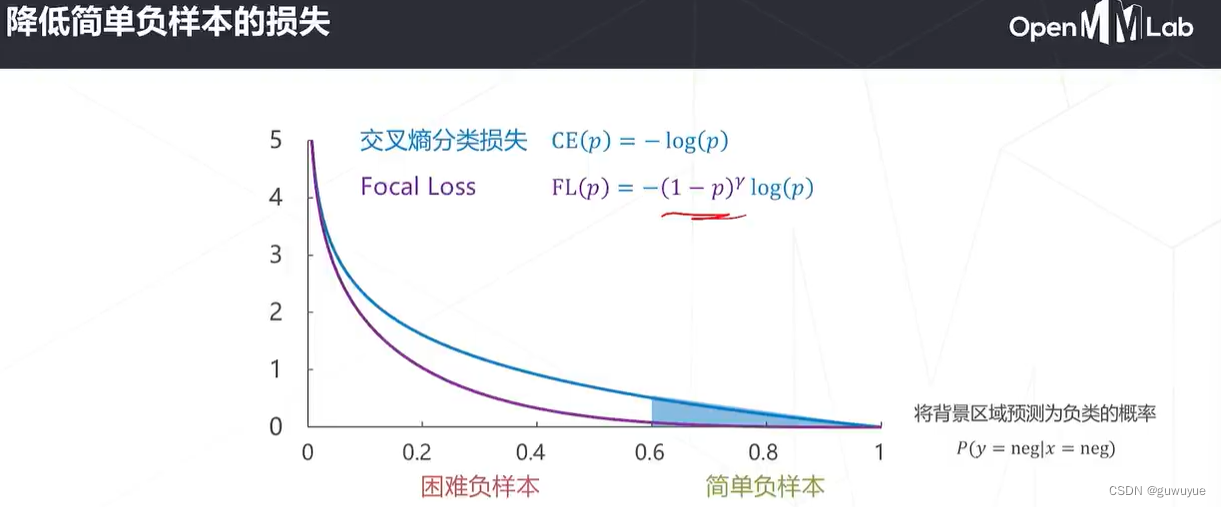
- focal loss
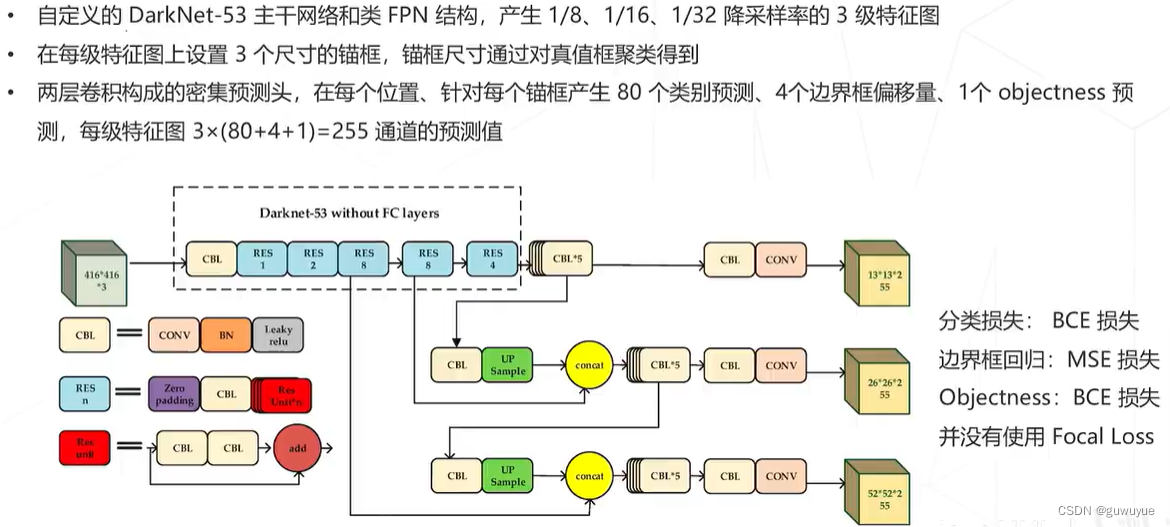
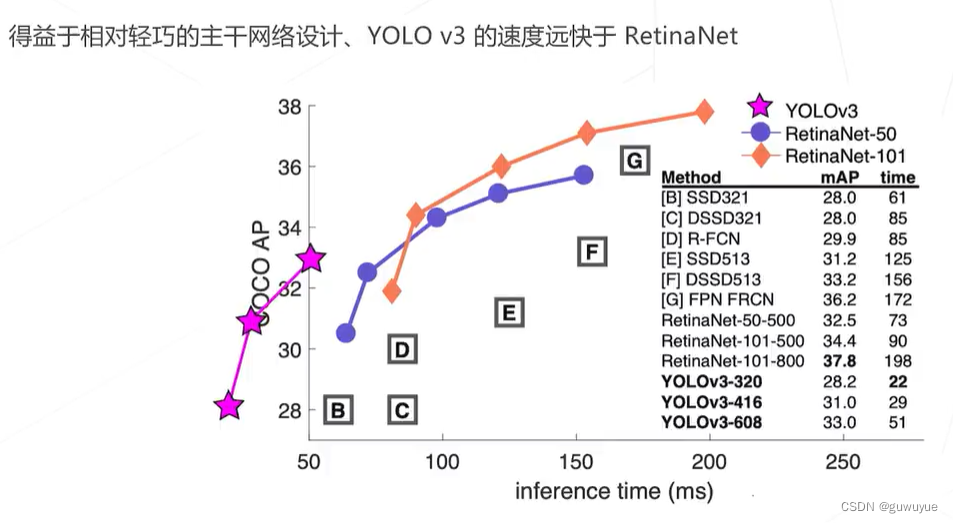
- yolo v3 2018



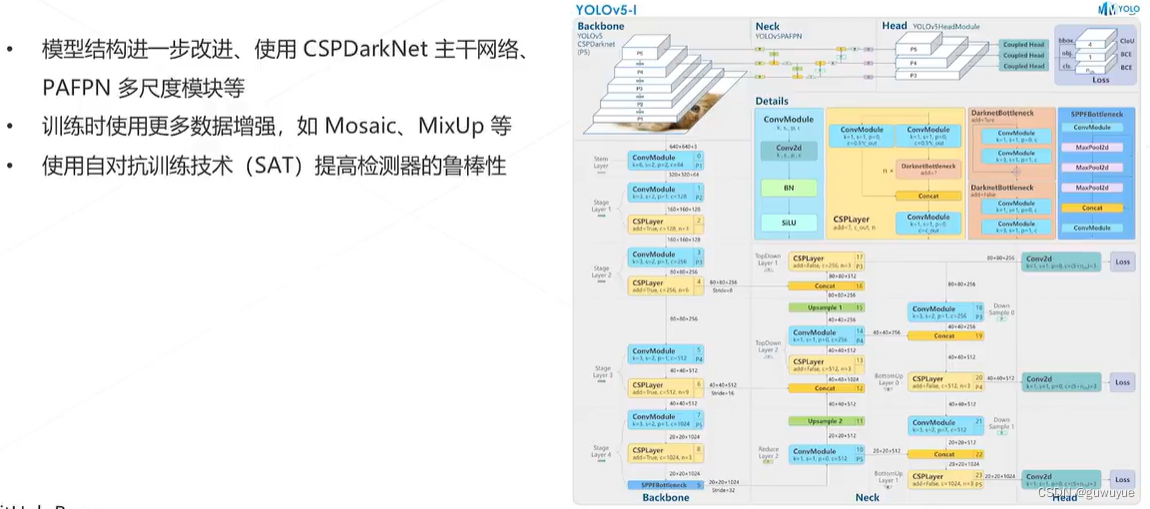
- yolo v5 2020
-
无锚框目标检测算法 anchor-free detectors
- 锚框 vs 无锚框
-
fcos-fully convolutional one-stage 2019
-
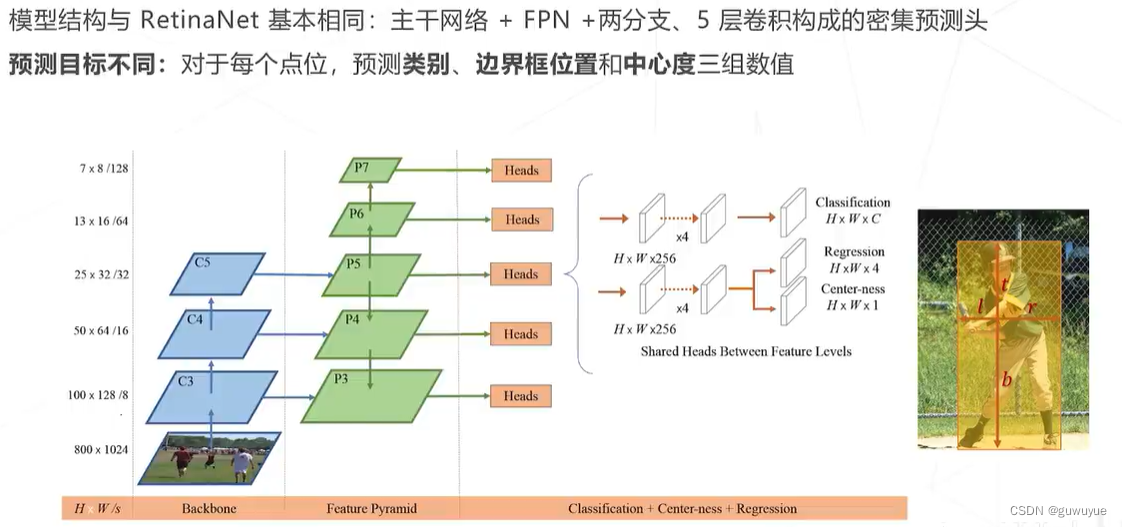
-
fcos的预测目标 & 匹配规则
-
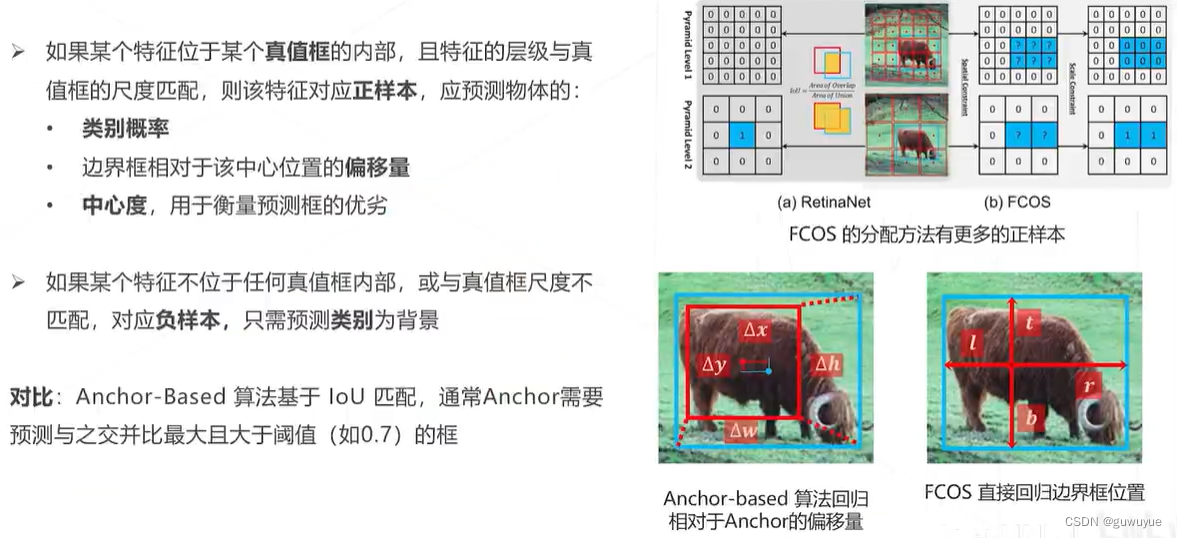
-
fcos的多尺度匹配
-
-
中心度center-ness
-

-
fcos的损失函数
-
-
centernet2019
-
-
yolo x 2021
-
-
发表评论