一、3d相机简介
常见的三维视觉技术,包含双目、tof、激光三角、结构光等
毫米级:双目、tof、结构光(散斑)的精度为 mm 级,多见于消费领域,如:导航避障,vr/ar,刷脸支付等
微米级:线激光、结构光(编码)的精度是 um 级,主要应用在工业领域,如:表面缺陷检测、三维测量等
纳米级:另外,还有 nm 级精度的光谱共焦技术,可用于透明材质物体的三维测量
线激光3d相机,是一种基于三角测量原理,通过图像传感器,捕获激光发生器投射在物体表面的激光线信息,重构物体表面轮廓信息的三维相机。
以上文字来源于https://zhuanlan.zhihu.com/p/486516636
线激光3d相机品牌:基恩士keyence 埃尔森lmi 深视sszn
本文将介绍深视智能的线激光常见问题以及编程方式
二、sszn线激光
2.1常见问题
触发方式: 连续触发、io触发、编码器触发
最大速度计算公式:
最大速度 = 细化点数 * 采样频率 * 0.8 * 脉冲当量
扫描长度计算公式:
扫描长度 = 细化点数 * 批处理点数 * 脉冲当量
脉冲当量一般情况下为0.001mm
批处理点数不变的情况下,如何提高扫描速度?
压缩景深,可以提高采样频率
压缩景深z轴范围变小,需要看样品高度是否支持压缩景深,如果样品扫描不全就不能压缩
2.2 sdk接口介绍
#ifndef sr7link__h
#define sr7link__h
#include <stdio.h>
#ifdef win32
#define sr7_if_api __declspec(dllexport)
#else
#define sr7_if_api extern
#endif
typedef void * sr7if_data;
/// \brief 高速数据通信的回调函数接口.
/// \param pbuffer 指向储存概要数据的缓冲区的指针.
/// \param dwsize 每个单元(行)的字节数量.
/// \param dwcount 存储在pbuffer中的内存的单元数量.
/// \param dwnotify 中断或批量结束等中断的通知.
/// \param dwuser 用户自定义信息.
///
typedef void (*sr7if_callback)(char* pbuffer, unsigned int dwsize, unsigned int dwcount, unsigned int dwnotify, unsigned int dwuser);
typedef void (*sr7if_batchonetimecallback)(const void *info, const sr7if_data *data);
typedef struct {
unsigned char abyipaddress[4];
} sr7if_ethernet_config;
#define sr7if_error_not_found (-999) // 功能(相机)不存在.
#define sr7if_error_command (-998) // 该命令不支持.
#define sr7if_error_parameter (-997) // 参数错误.
#define sr7if_error_unimplemented (-996) // 功能未实现.
#define sr7if_error_handle (-995) // 句柄无效.
#define sr7if_error_memory (-994) // 内存(溢出/定义)错误.
#define sr7if_error_timeout (-993) // 操作超时.
#define sr7if_error_databuffer (-992) // 数据大缓冲区不足.
#define sr7if_error_stream (-991) // 数据流错误.
#define sr7if_error_closed (-990) // 接口关闭不可用.
#define sr7if_error_version (-989) // 当前版本无效.
#define sr7if_error_abort (-988) // 操作被终止,如连接被关闭、连接中断等.
#define sr7if_error_already_exists (-987) // 操作和现有的设置冲突.
#define sr7if_error_frame_loss (-986) // 批处理帧丢失.
#define sr7if_error_roll_data_overflow (-985) // 无终止循环批处理出现溢出异常等.
#define sr7if_error_roll_busy (-984) // 无终止循环批处理读数据忙.
#define sr7if_error_mode (-983) // 当前处理函数与设置的批处理模式有冲突.
#define sr7if_error_camera_not_online (-982) // 相机(传感头)不在线.
#define sr7if_error (-1) // 一般性错误,如设置失败、数据获取失败等.
#define sr7if_normal_stop (-100) // 正常停止,如外部io停止批处理操作等.
#define sr7if_ok (0) // 正确操作.
#ifdef __cplusplus
extern "c" {
#endif
///
/// \brief sr7if_ethernetopen 通信连接.
/// \param ldeviceid 设备id号,范围为0-3.
/// \param pethernetconfig ethernet 通信设定.
/// \return
/// <0: 失败.
/// =0: 成功.
///
sr7_if_api int sr7if_ethernetopen(unsigned int ldeviceid, sr7if_ethernet_config* pethernetconfig);
///
/// \brief sr7if_commclose 断开与相机的连接.
/// \param ldeviceid 设备id号,范围为0-3.
/// \return
/// <0: 失败.
/// =0: 成功.
///
sr7_if_api int sr7if_commclose(unsigned int ldeviceid);
///
/// \brief sr7if_switchprogram 切换相机配置的参数.重启后不保存配方号.
/// \param ldeviceid 设备id号,范围为0-3.
/// \param no: 任务参数列表编号 0 - 63.
/// \return
/// <0: 失败.
/// =0: 成功.
///
sr7_if_api int sr7if_switchprogram(unsigned int ldeviceid, int no);
///
/// \brief sr7if_getonlinecamerab 获取传感头b是否在线
/// \param ldeviceid 设备id号,范围为0-3.
/// \return
/// <0: -982:传感头b不在线
/// 其他:获取失败
/// =0: 传感头b在线
///
sr7_if_api int sr7if_getonlinecamerab(unsigned int ldeviceid);
///
/// \brief sr7if_startmeasure 开始批处理,立即执行批处理程序.
/// \param ldeviceid 设备id号,范围为0-3.
/// \param timeout 非循环获取时,超时时间(单位ms);循环模式该参数可设置为-1.
/// \return
/// <0: 失败
/// =0: 成功
///
sr7_if_api int sr7if_startmeasure(unsigned int ldeviceid, int timeout = 50000);
/// \brief sr7if_startiotriggermeasure 开始批处理,硬件io触发开始批处理,具体查看硬件手册.
/// \param ldeviceid 设备id号,范围为0-3.
/// \param timeout 非循环获取时,超时时间(单位ms);循环模式该参数可设置为-1.
/// \param restart 预留,设为0.
/// \return
/// <0: 失败
/// =0: 成功
///
sr7_if_api int sr7if_startiotriggermeasure(unsigned int ldeviceid, int timeout = 50000, int restart = 0);
///
/// \brief sr7if_stopmeasure 停止批处理
/// \param ldeviceid 设备id号,范围为0-3.
/// \return
/// <0: 失败.
/// =0: 成功.
///
sr7_if_api int sr7if_stopmeasure(unsigned int ldeviceid);
/// \brief sr7if_receivedata 阻塞方式获取数据.
/// \param ldeviceid 设备id号,范围为0-3.
/// \param dataobj 返回数据指针.
/// \return
/// <0: 获取失败.
/// =0: 成功.
///
sr7_if_api int sr7if_receivedata(unsigned int ldeviceid, sr7if_data dataobj);
/// \brief sr7if_profilepointsetcount 获取当前批处理设定行数
/// \param ldeviceid 设备id号,范围为0-3
/// \param dataobj 预留,设置为null
/// \return 返回实际批处理行数
///
sr7_if_api int sr7if_profilepointsetcount(unsigned int ldeviceid, const sr7if_data dataobj);
/// \brief sr7if_profilepointcount 获取批处理实际获取行数.
/// \param ldeviceid 设备id号,范围为0-3.
/// \param dataobj 预留,设置为null.
/// \return 返回批处理实际获取行数.
///
sr7_if_api int sr7if_profilepointcount(unsigned int ldeviceid, const sr7if_data dataobj);
/// \brief sr7if_profiledatawidth 获取数据宽度.
/// \param ldeviceid 设备id号,范围为0-3.
/// \param dataobj 预留,设置为null.
/// \return 返回数据宽度(单位像素).
///
sr7_if_api int sr7if_profiledatawidth(unsigned int ldeviceid, const sr7if_data dataobj);
///
/// \brief sr7if_profiledata_xpitch 获取数据x方向间距.
/// \param ldeviceid 设备id号,范围为0-3.
/// \param dataobj 预留,设置为null.
/// \return 返回数据x方向间距(mm).
///
sr7_if_api double sr7if_profiledata_xpitch(unsigned int ldeviceid, const sr7if_data dataobj);
///
/// \brief sr7if_getencoder 获取编码器值
/// \param ldeviceid 设备id号,范围为0-3.
/// \param dataobj 预留,设置为null
/// \param encoder 返回数据指针,双相机为a/b交替数据
/// \return
/// <0: 获取失败.
/// =0: 成功.
///
sr7_if_api int sr7if_getencoder(unsigned int ldeviceid, const sr7if_data dataobj, unsigned int *encoder);
///
/// \brief sr7if_getencodercontiune 非阻塞方式获取编码器值
/// \param ldeviceid 设备id号,范围为0-3.
/// \param dataobj 预留,设置为null
/// \param encoder 返回数据指针,双相机为a/b交替数据
/// \param getcnt 获取数据长度
/// \return
/// <0: 获取失败.
/// >=0: 实际返回的数据长度.
///
sr7_if_api int sr7if_getencodercontiune(unsigned int ldeviceid, const sr7if_data dataobj, unsigned int *encoder, unsigned int getcnt);
///
/// \brief sr7if_getprofiledata 阻塞方式获取轮廓数据
/// \param ldeviceid 设备id号,范围为0-3.
/// \param dataobj 预留,设置为null
/// \param profile 返回数据指针,双相机为a/b行交替数据
/// \return
/// <0: 获取失败.
/// =0: 成功.
///
sr7_if_api int sr7if_getprofiledata(unsigned int ldeviceid, const sr7if_data dataobj, int *profile);
///
/// \brief sr7if_getprofilecontiunedata 非阻塞方式获取轮廓数据
/// \param ldeviceid 设备id号,范围为0-3.
/// \param dataobj 预留,设置为null
/// \param profile 返回数据指针,双相机为a/b行交替数据
/// \param getcnt 获取数据长度
/// \return
/// <0: 获取失败.
/// >=0: 实际返回的数据长度.
///
sr7_if_api int sr7if_getprofilecontiunedata(unsigned int ldeviceid, const sr7if_data dataobj, int *profile, unsigned int getcnt);
///
/// \brief sr7if_getintensitydata 阻塞方式获取亮度数据
/// \param ldeviceid 设备id号,范围为0-3.
/// \param dataobj 预留,设置为null
/// \param intensity 返回数据指针,双相机为a/b行交替数据
/// \return
/// <0: 获取失败.
/// =0: 成功.
///
sr7_if_api int sr7if_getintensitydata(unsigned int ldeviceid, const sr7if_data dataobj, unsigned char *intensity);
///
/// \brief sr7if_getintensitycontiunedata 非阻塞获取亮度数据
/// \param ldeviceid 设备id号,范围为0-3.
/// \param dataobj 预留,设置为null
/// \param intensity 返回数据指针,双相机为a/b行交替数据
/// \param getcnt 获取数据长度
/// \return
/// <0: 获取失败.
/// >=0: 返回获实际数据行数.
///
sr7_if_api int sr7if_getintensitycontiunedata(unsigned int ldeviceid, const sr7if_data dataobj, unsigned char *intensity, unsigned int getcnt);
///
/// \brief sr7if_getbatchrolldata 无终止循环获取数据
/// \param ldeviceid 设备id号,范围为0-3.
/// \param dataobj 预留,设置为null
/// \param profile 返回轮廓数据指针,双相机为a/b行交替数据
/// \param intensity 返回亮度数据指针,双相机为a/b行交替数据
/// \param encoder 返回编码器数据指针,双相机为a/b交替数据
/// \param frameid 返回帧编号数据指针
/// \param frameloss 返回批处理过快掉帧数量数据指针,双相机为a/b交替数据
/// \param getcnt 获取数据长度
/// \return
/// <0: 获取失败.
/// >=0: 实际返回的数据长度.
///
sr7_if_api int sr7if_getbatchrolldata(unsigned int ldeviceid, const sr7if_data dataobj,
int *profile, unsigned char *intensity, unsigned int *encoder, long long *frameid, unsigned int *frameloss,
unsigned int getcnt);
///
/// \brief sr7if_geterror 获取系统错误信息
/// \param ldeviceid 设备id号,范围为0-3.
/// \param pbyerrcnt 返回错误码数量
/// \param pwerrcode 返回错误码指针
/// \return
/// <0: 获取失败.
/// =0: 成功.
///
sr7_if_api int sr7if_geterror(unsigned int ldeviceid, int *pbyerrcnt, int *pwerrcode);
///
/// \brief sr7if_getbatchrollerror 无终止循环获取数据异常计算值
/// \param ldeviceid 设备id号,范围为0-3.
/// \param etherrcnt 返回网络传输导致错误的数量
/// \param usererrcnt 返回用户获取导致错误的数量
/// \return
/// <0: 获取失败.
/// =0: 成功.
///
sr7_if_api int sr7if_getbatchrollerror(unsigned int ldeviceid, int *etherrcnt, int *usererrcnt);
///
/// \brief sr7if_clearerror 暂无
/// \param ldeviceid
/// \param werrcode
/// \return
/// <0: 清除失败
/// =0: 成功
///
sr7_if_api int sr7if_clearerror(unsigned int ldeviceid, unsigned short werrcode);
///
/// \brief sr7if_getversion 获取库版本号.
/// \return 返回版本信息.
///
sr7_if_api const char *sr7if_getversion();
///
/// \brief sr7if_getmodels 获取相机型号.
/// \param ldeviceid 设备id号,范围为0-3.
/// \return 返回相机型号字符串.
///
sr7_if_api const char *sr7if_getmodels(unsigned int ldeviceid);
///
/// \brief sr7if_getheaderserial 获取相机头序列号
/// \param ldeviceid 设备id号,范围为0-3.
/// \param head 0:相机头a 1:相机头b
/// \return
/// !=null: 返回相机序列号字符串.
/// =null: 失败,相应头不存在或者参数错误.
///
sr7_if_api const char *sr7if_getheaderserial(unsigned int ldeviceid, int head);
/// 高速数据通信相关
///
/// \brief sr7if_highspeeddataethernetcommunicationinitalize 初始化以太网高速数据通信.
/// \param ldeviceid 设备id号,范围为0-3.
/// \param pethernetconfig ethernet 通信设定.
/// \param whighspeedportno ethernet 通信端口设定.
/// \param pcallback 高速通信中数据接收的回调函数.
/// \param dwprofilecnt 回调函数被调用的频率. 范围1-256
/// \param dwthreadid 线程号.
/// \return
/// <0: 失败.
/// =0: 成功.
///
sr7_if_api int sr7if_highspeeddataethernetcommunicationinitalize(unsigned int ldeviceid, sr7if_ethernet_config* pethernetconfig, int whighspeedportno,
sr7if_callback pcallback, unsigned int dwprofilecnt, unsigned int dwthreadid);
///
/// \brief sr7if_setoutputportlevel 设置输出端口电平.
/// \param ldeviceid 设备id号,范围为0-3.
/// \param port 输出端口号,范围为0-7.
/// \param level 输出电平值.
/// \return
/// <0: 失败.
/// =0: 成功.
///
sr7_if_api int sr7if_setoutputportlevel(unsigned int ldeviceid, unsigned int port, bool level);
///
/// \brief sr7if_setoutputportlevel 读取输入端口电平.
/// \param ldeviceid 设备id号,范围为0-3.
/// \param port 输入端口号,范围为0-7.
/// \param level 读取输入电平.
/// \return
/// <0: 失败.
/// =0: 成功.
///
sr7_if_api int sr7if_getinputportlevel(unsigned int ldeviceid, unsigned int port, bool *level);
///
/// \brief sr7if_getsingleprofile 获取当前一条轮廓(非批处理下,需在edgeimaging中设置为2.5d模式)
/// \param ldeviceid 设备id号,范围为0-3.
/// \param pprofiledata 返回轮廓的指针.
/// \param pencoder 返回编码器的指针.
/// \return
/// <0: 失败.
/// =0: 成功.
///
sr7_if_api int sr7if_getsingleprofile(unsigned int ldeviceid, int *pprofiledata, unsigned int *pencoder);
///
/// \brief sr7if_setsetting 参数设定.
/// \param ldeviceid 设备id号,范围为0-3.
/// \param depth 设置的值的级别.
/// \param type 设置类型.
/// \param category 设置种类.
/// \param item 设置项目.
/// \param target[4] 根据发送 / 接收的设定,可能需要进行相应的指定。无需设定时,指定为 0。
/// \param pdata 设置数据.
/// \param datasize 设置数据的长度.
/// \return
/// <0: 失败.
/// =0: 成功.
///
sr7_if_api int sr7if_setsetting(unsigned int ldeviceid, int depth, int type, int category, int item, int target[4], void *pdata, int datasize);
///
/// \brief sr7if_getsetting 参数设定.
/// \param ldeviceid 设备id号,范围为0-3.
/// \param type 获取类型.
/// \param category 获取种类.
/// \param item 获取项目.
/// \param target[4] 根据发送 / 接收的设定,可能需要进行相应的指定。无需设定时,指定为 0。
/// \param pdata 获取的数据.
/// \param datasize 获取数据的长度.
/// \return
/// <0: 失败.
/// =0: 成功.
///
sr7_if_api int sr7if_getsetting(unsigned int ldeviceid, int type, int category, int item, int target[4], void *pdata, int datasize);
///
/// \brief sr7if_exportparameters 将系统参数导出,注意只导出当前任务的参数.
/// \param ldeviceid 设备id号,范围为0-3.
/// \param size 返回参数表的大小.
/// \return
/// null: 失败.
/// 其他: 成功.
///
sr7_if_api const char *sr7if_exportparameters(unsigned int ldeviceid, unsigned int *size);
///
/// \brief sr7if_loadparameters 将导出的参数导入到系统中.
/// \param ldeviceid 设备id号,范围为0-3.
/// \param psettingdata 导入参数表指针.
/// \param size 导入参数表的大小.
/// \return
/// <0: 失败.
/// =0: 成功.
///
sr7_if_api int sr7if_loadparameters(unsigned int ldeviceid, const char *psettingdata, unsigned int size);
///
/// \brief sr7if_getlicensekey 返回产品剩余天数
/// \param remainday 返回剩余天数
/// \return
/// < 0: 失败,参数错误或产品未注册
/// >=0: 成功.
///
sr7_if_api int sr7if_getlicensekey(unsigned int ldeviceid, unsigned short *remainday);
///
/// \brief sr7if_getcurrentencoder 读取当前编码器值
/// \param value 返回编码器值
/// \return
/// <0: 失败.
/// =0: 成功.
///
sr7_if_api int sr7if_getcurrentencoder(unsigned int ldeviceid, unsigned int *value);
///
/// \brief sr7if_getcameratemperature 读取相机温度,单位0.01摄氏度
/// \param tempa 相机a温度值
/// \param tempb 相机b温度值
/// \return
/// <0: 失败.
/// =0: 成功.
///
sr7_if_api int sr7if_getcameratemperature(unsigned int ldeviceid, unsigned int *tempa, unsigned int *tempb);
//
typedef struct {
int xpoints; //x方向数据数量
int batchpoints; //批处理数量
unsigned int batchtimes; //批处理次数
double xpixth; //x方向点间距
unsigned int startencoder; //批处理开始编码器值
int headnumber; //相机头数量
int returnstatus; //sr7if_ok:正常批处理
//sr7if_normal_stop
//sr7if_error_abort
//sr7if_error_closed
} sr7if_str_callback_info;
///
/// \brief sr7if_setbatchonetimedatahandler 设置回调函数,建议获取数据后另外开启线程进行处理(获取数据模式:批处理一次回调一次)
/// \param ldeviceid 设备id号,范围为0-3.
/// \param callfunc 回调函数.
/// \return
/// <0: 失败.
/// =0: 成功.
///
sr7_if_api int sr7if_setbatchonetimedatahandler(unsigned int ldeviceid, sr7if_batchonetimecallback callfunc);
///
/// \brief sr7if_startmeasurewithcallback 开始批处理(获取数据模式:批处理一次回调一次)
/// \param ldeviceid 设备id号,范围为0-3.
/// \param immediatebatch 0:立即开始批处理 1:等待外部开始批处理.
/// \return
/// <0: 失败.
/// =0: 成功.
///
sr7_if_api int sr7if_startmeasurewithcallback(int ideviceid, int immediatebatch);
///
/// \brief sr7if_triggeronebatch 批处理软件触发开始(获取数据模式:批处理一次回调一次)
/// \param ldeviceid 设备id号,范围为0-3.
/// \return
/// <0: 失败.
/// =0: 成功.
///
sr7_if_api int sr7if_triggeronebatch(int ideviceid);
///
/// \brief sr7if_getbatchprofilepoint 批处理轮廓获取(获取数据模式:批处理一次回调一次)
/// \param ldeviceid 设备id号,范围为0-3.
/// \param head 0:相机头a 1:相机头b
/// \return
/// !=null: 返回数据指针
/// =null: 失败,无数据或者相应头不存在.
///
sr7_if_api const int *sr7if_getbatchprofilepoint(const sr7if_data *dataindex, int head);
///
/// \brief sr7if_getbatchintensitypoint 批处理亮度获取(获取数据模式:批处理一次回调一次)
/// \param ldeviceid 设备id号,范围为0-3.
/// \param head 0:相机头a 1:相机头b
/// \return
/// !=null: 返回数据指针
/// =null: 失败,无数据或者相应头不存在.
///
sr7_if_api const unsigned char *sr7if_getbatchintensitypoint(const sr7if_data *dataindex, int head);
///
/// \brief sr7if_getbatchencoderpoint 批处理编码器获取(获取数据模式:批处理一次回调一次)
/// \param ldeviceid 设备id号,范围为0-3.
/// \param head 0:相机头a 1:相机头b
/// \return
/// !=null: 返回数据指针
/// =null: 失败,无数据或者相应头不存在.
///
sr7_if_api const unsigned int *sr7if_getbatchencoderpoint(const sr7if_data *dataindex, int head);
#ifdef __cplusplus
}
#endif
#endif //sr7link__h
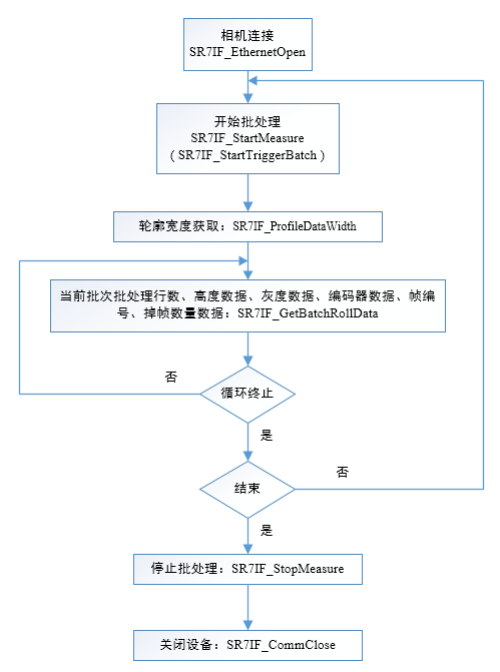
2.3 使用流程
阻塞方式获取数据
2.4 qt中编程
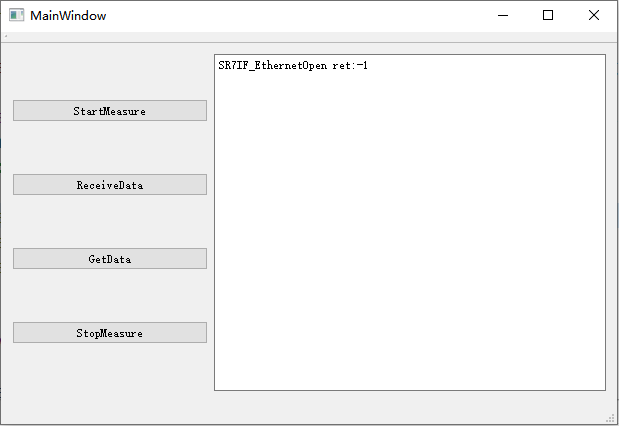
设计简易界面
pro文件链接sdk
sr_third_party_path = $$pwd/3rdparty/sr_sdkdll
# sr7link
win32 {
config(release, debug|release) {
libs += -l$$sr_third_party_path/x64/ -lsr7link
}else {
libs += -l$$sr_third_party_path/x64/ -lsr7link
}
}
includepath += $$sr_third_party_path/include
dependpath += $$sr_third_party_path/include调用代码
#include "mainwindow.h"
#include "ui_mainwindow.h"
#include "highgui/highgui.hpp"
#include "imgproc/imgproc.hpp"
const int device_id = 0;
mainwindow::mainwindow(qwidget *parent) :
qmainwindow(parent),
ui(new ui::mainwindow)
{
ui->setupui(this);
sr7if_ethernet_config srethernetconfig;
srethernetconfig.abyipaddress[0] = 192;
srethernetconfig.abyipaddress[1] = 168;
srethernetconfig.abyipaddress[2] = 0;
srethernetconfig.abyipaddress[3] = 10;
int ret = sr7if_ethernetopen(device_id, &srethernetconfig);
ui->textbrowser->append(tr("sr7if_ethernetopen ret:%1").arg(ret));
}
mainwindow::~mainwindow()
{
int ret = sr7if_commclose(device_id);
ui->textbrowser->append(tr("sr7if_commclose ret:%1").arg(ret));
delete ui;
}
void mainwindow::on_btnstartmeasure_clicked()
{
int ret = sr7if_startmeasure(device_id, 50 * 1000);
ui->textbrowser->append(tr("sr7if_startmeasure ret:%1").arg(ret));
}
void mainwindow::on_btnreceivedata_clicked()
{
int ret = sr7if_receivedata(device_id, dataobject);
ui->textbrowser->append(tr("sr7if_receivedata ret:%1").arg(ret));
}
void mainwindow::on_btngetdata_clicked()
{
int batchpoint = sr7if_profilepointcount(device_id, dataobject);
int m_datawidth = sr7if_profiledatawidth(device_id, dataobject);
ui->textbrowser->append(tr("batchpoint:%1 datawidth:%2").arg(batchpoint).arg(m_datawidth));
int *heightdata = new int[batchpoint * m_datawidth];
int ret = sr7if_getprofiledata(device_id, dataobject, heightdata);
ui->textbrowser->append(tr("sr7if_getprofiledata ret:%1").arg(ret));
unsigned char *graydata = new unsigned char[batchpoint * m_datawidth];
ret = sr7if_getintensitydata(device_id, dataobject, graydata);
ui->textbrowser->append(tr("sr7if_getintensitydata ret:%1").arg(ret));
unsigned int *encoder = new unsigned int[batchpoint];
ret = sr7if_getencoder(device_id, dataobject, encoder);
ui->textbrowser->append(tr("sr7if_getencoder ret:%1").arg(ret));
cv::mat graymat = cv::mat(batchpoint, m_datawidth, cv_8uc1, graydata);
cv::imwrite("graymat.bmp", graymat);
// cv::flip(graymat, graymat, 0);
delete[] heightdata;
delete[] graydata;
delete[] encoder;
}
void mainwindow::on_btnstopmeasure_clicked()
{
int ret = sr7if_stopmeasure(device_id);
}




发表评论