文章目录
前言
carsim内部有许多相关联合仿真的demo,simulink、labview等等都有涉及,这里简单介绍下python和carsim联合仿真的方法,虽然carsim官方有个steer_control.py相关的案例,但是感觉比较冗余,这里抽出重点部分和大家交流探讨下。
提示:以下是本篇文章正文内容,下面案例可供参考
一、carsim官方案例
在carsim项目文件夹路径下,例:c:\program files (x86)\carsim2022.1_data\extensions\custom_py,里面有几个案例可以参考下。
二、carsim配置
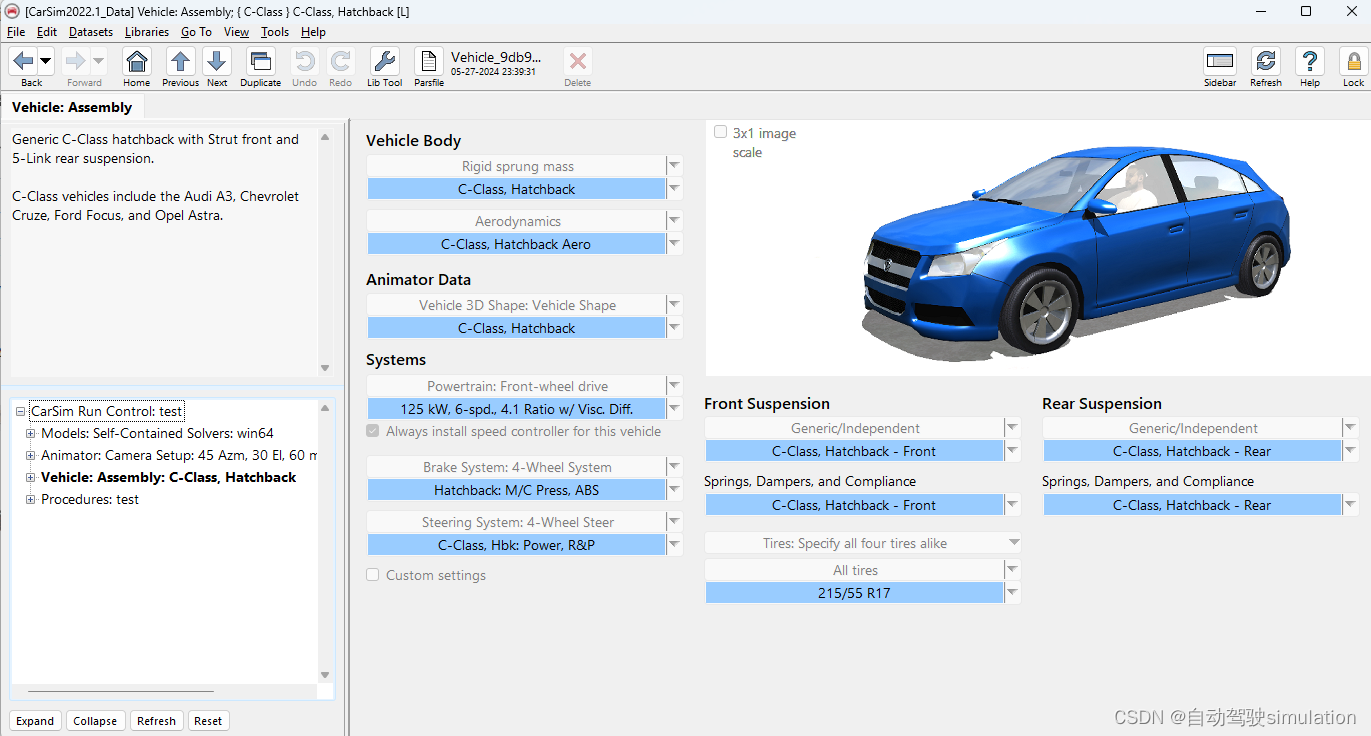
1、车辆模型
1)这里的车辆模型随便选一个就行了
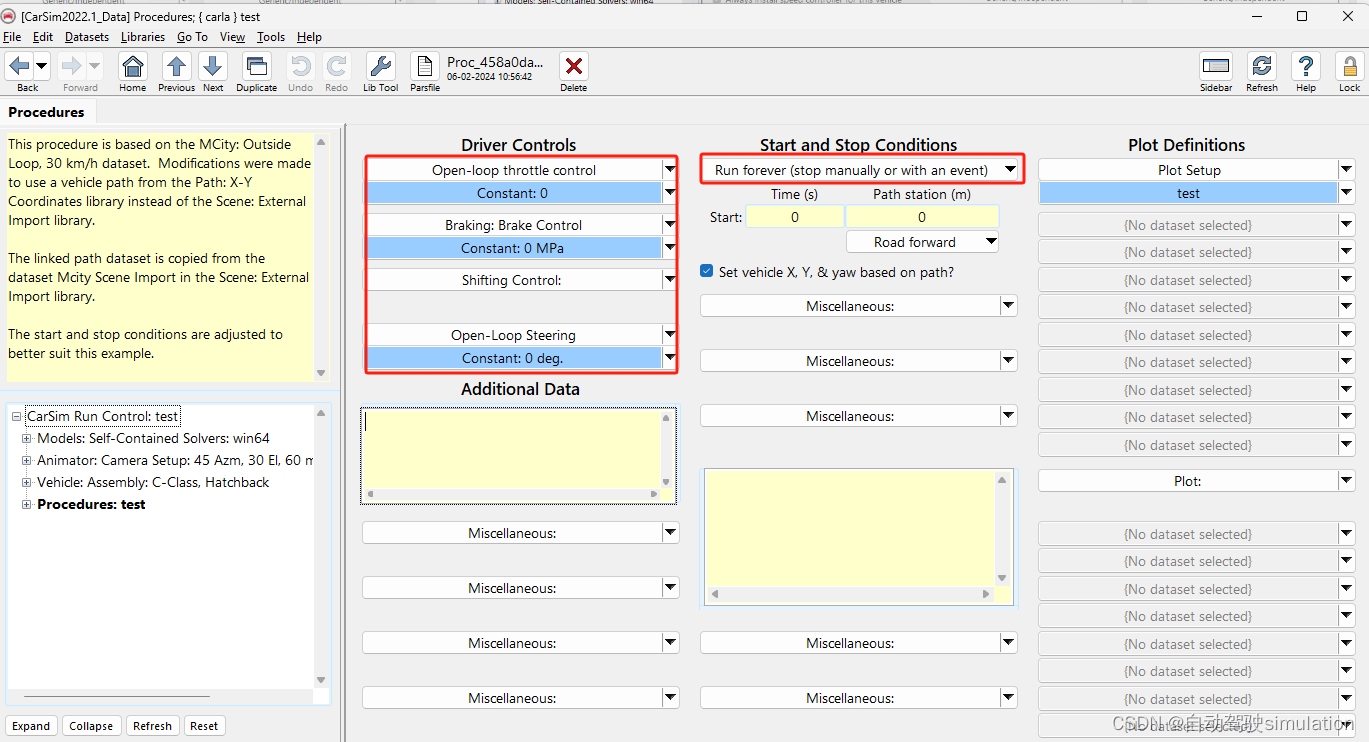
2、procedure配置
1)开环的节气门开度控制-油门
2)开环的制动主缸压力控制-刹车
3)开环的方向盘角度控制
4)运行条件选择run forver
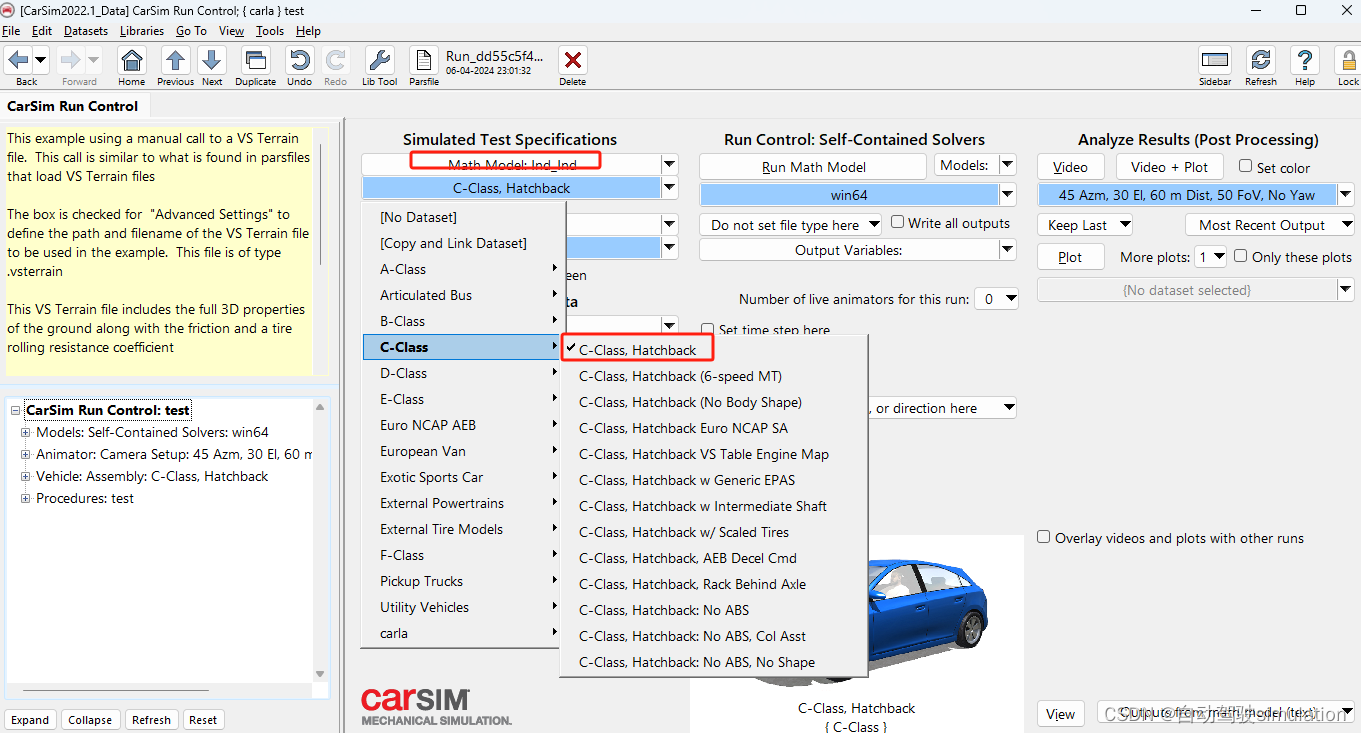
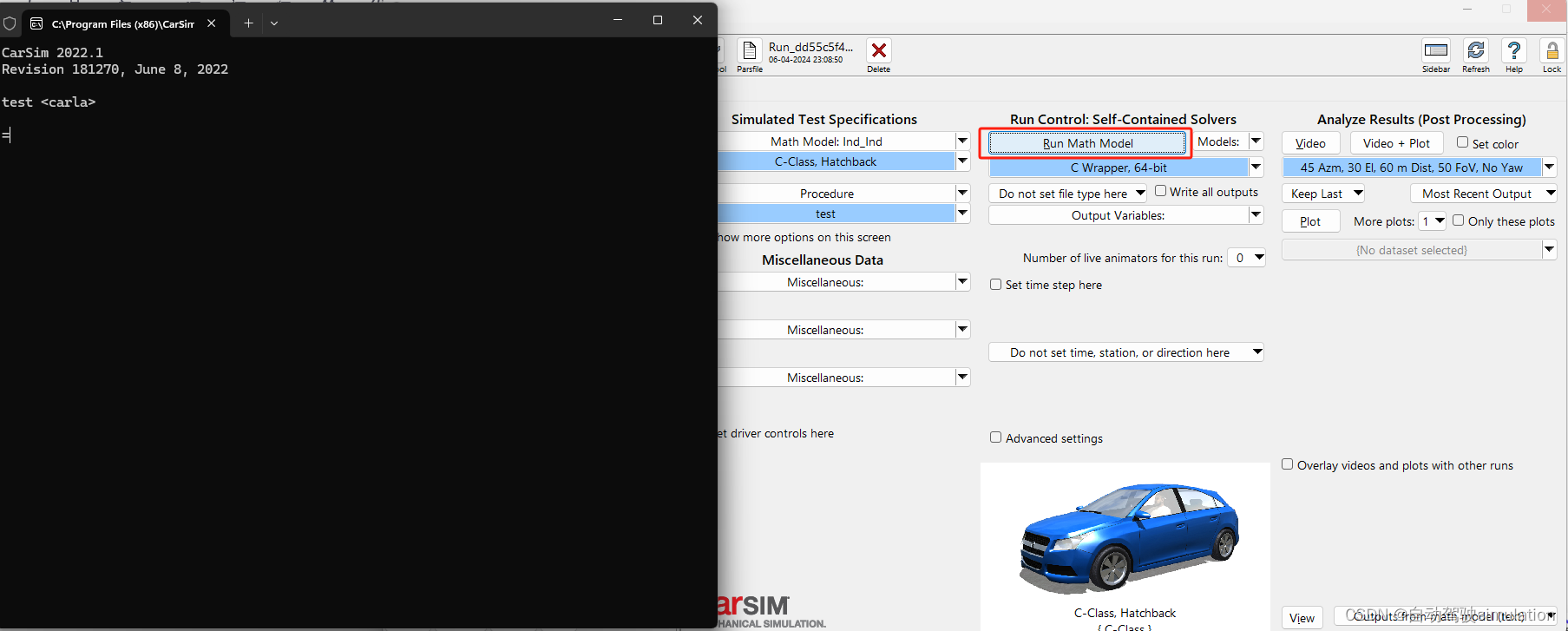
3、run control配置
1)选择运行模型为:self-contained solvers
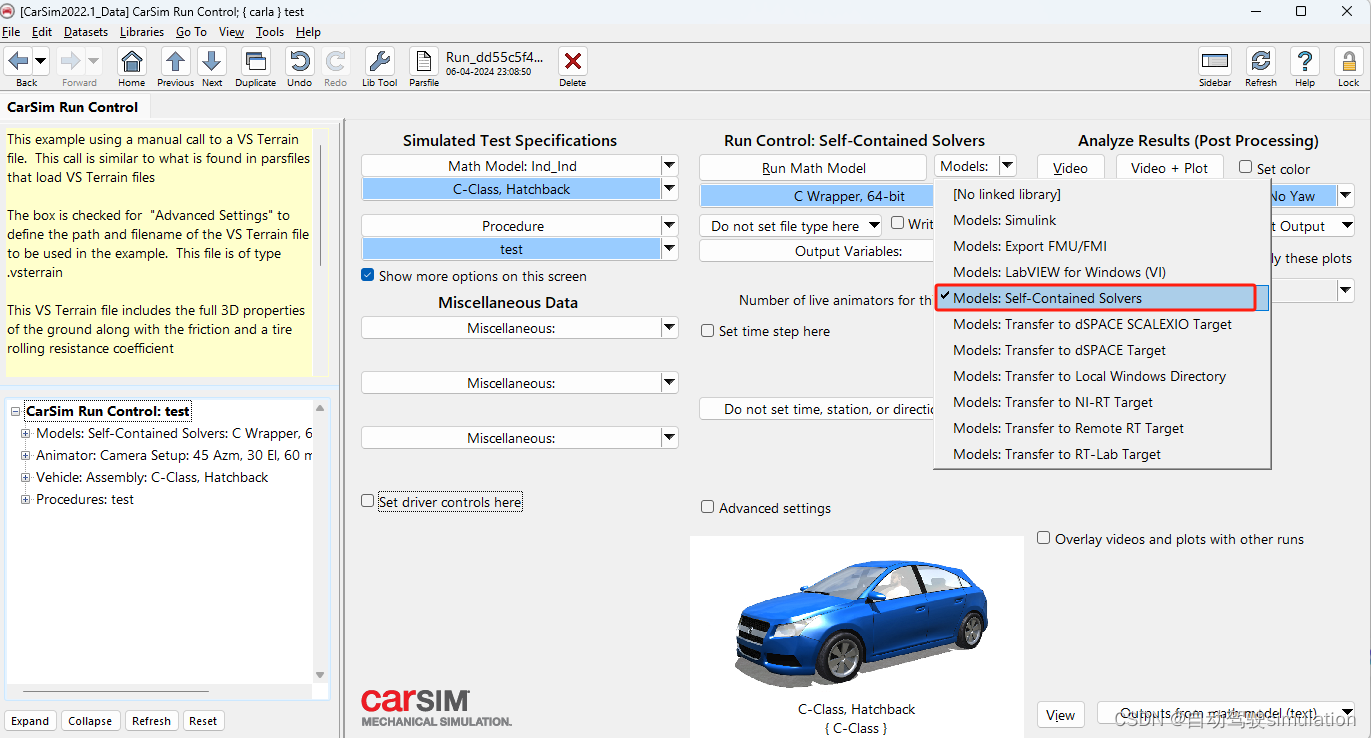
2)选择类型为c wrapper,64-bit
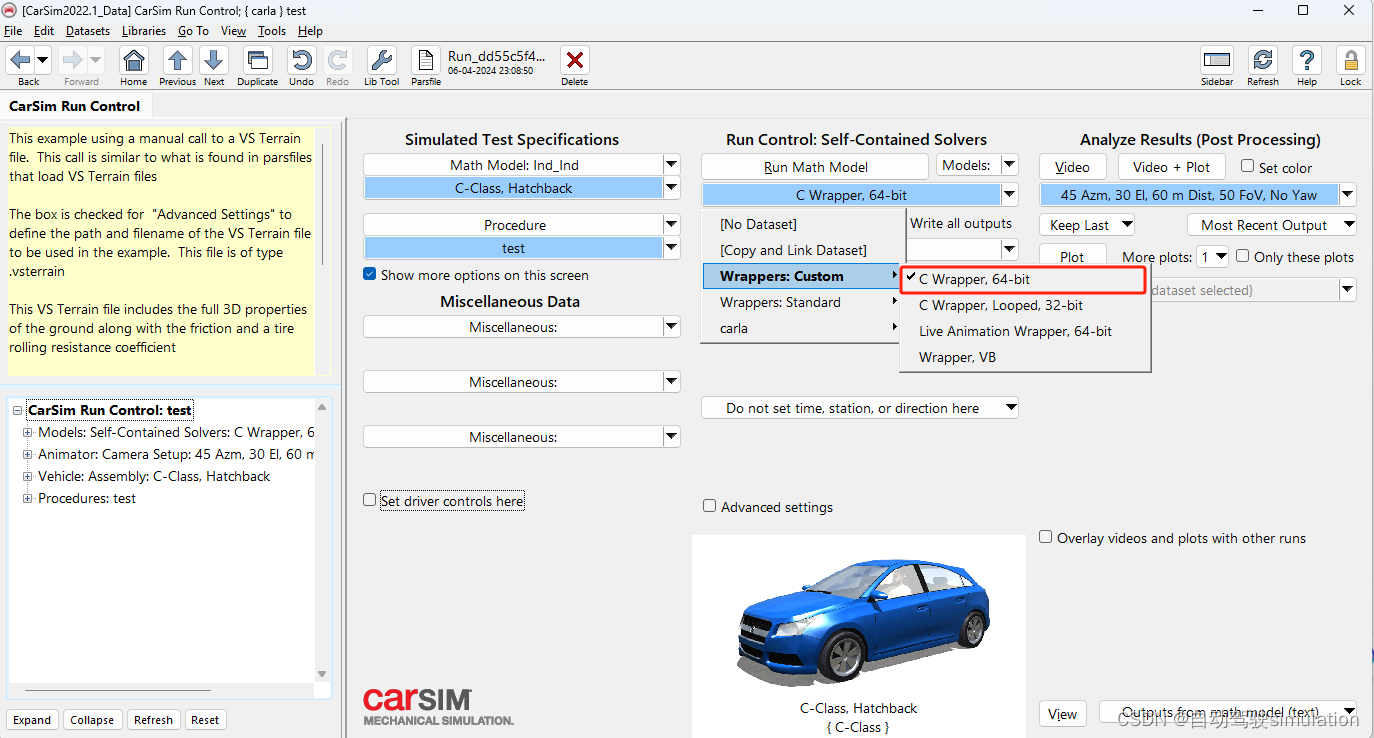
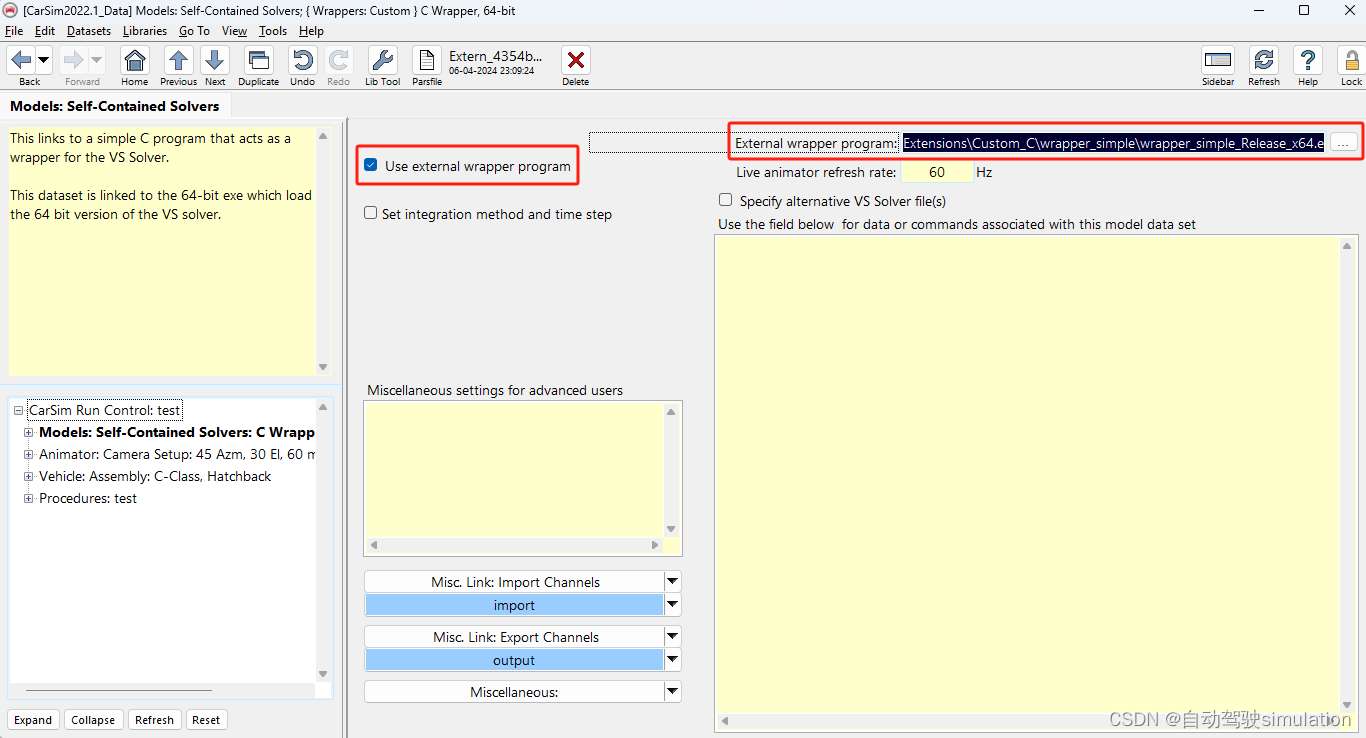
3)按照默认选择外部的解释器
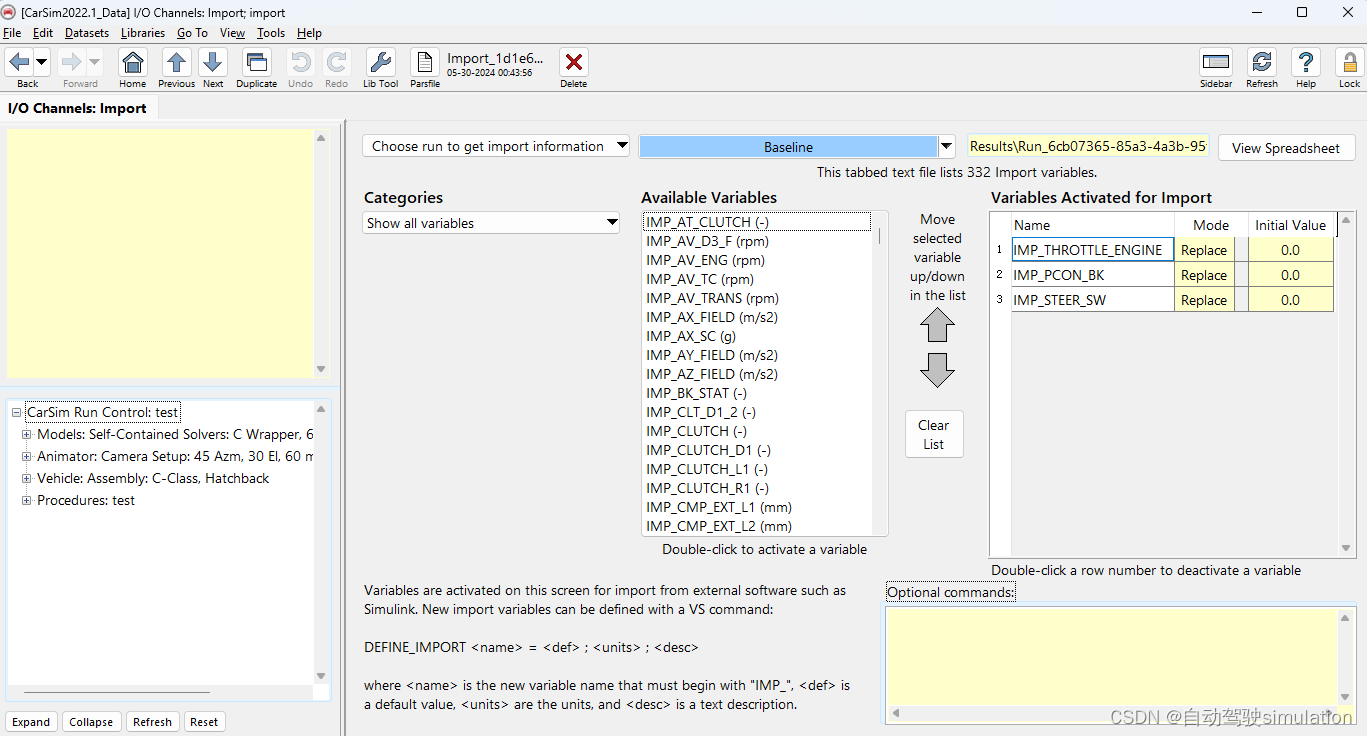
4)配置输入分别为:节气门开度,制动主缸压力,方向盘角度
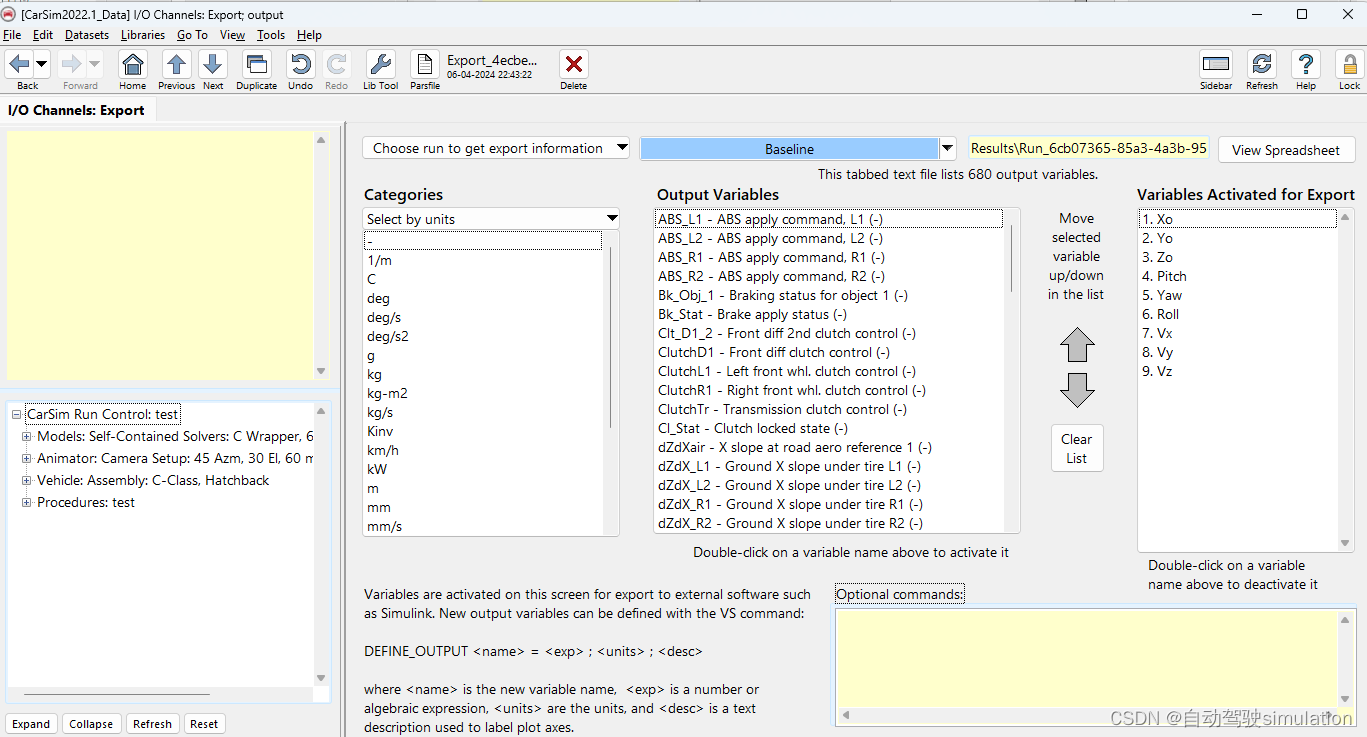
5)配置输出
三、python编写
1)第一步先找到vs_solver.py,用于调用simfile获取相关carsim dll的引用。vs_solver.py路径在c:\program files (x86)\carsim2022.1_data\extensions\custom_py,我们在下面代码中会引用vs_solver.py。
2)代码部分都很简单,一个是import vs_solver,另外一个比较重要的是simfile的路径需要填写,一般在你创建项目目录下如:c:\program files (x86)\carsim2022.1_data\simfile.sim,这个一定要根据你项目路径来填写。
import os
import keyboard
import ctypes
import vs_solver
class carsim_simulation():
def __init__(self):
self.simfile_path = r'c:\program files (x86)\carsim2022.1_data\simfile.sim'
self.vs = vs_solver.vs_solver()
self.vs_dll_exist_flag = self.vs_dll_is_exist()
self.configuration = self.vs.read_configuration(self.simfile_path)
def vs_dll_is_exist(self):
dll_path = self.vs.get_dll_path(self.simfile_path)
if dll_path is not none and os.path.exists(dll_path):
vs_dll = ctypes.cdll.loadlibrary(dll_path)
if self.vs.get_api(vs_dll):
exist_flag = true
else:
exist_flag = false
print(f'can not get dll api, please check the dll {dll_path}')
else:
exist_flag = false
print(f'please check dll_path or simfile_path existence or not')
return exist_flag
def get_export_array(self):
return self.vs.copy_export_vars(carsim_sim.configuration.get('n_export'))
def get_time_step(self):
return self.configuration.get('t_step')
def stop(self, t_current):
self.vs.terminate_run(t_current)
if __name__ == '__main__':
carsim_sim = carsim_simulation()
t_current = carsim_sim.get_time_step()
export_array = carsim_sim.get_export_array()
status = 0
while status == 0:
#更新当前时间
t_current = t_current + carsim_sim.get_time_step()
import_array = [0.1, 0, 0]
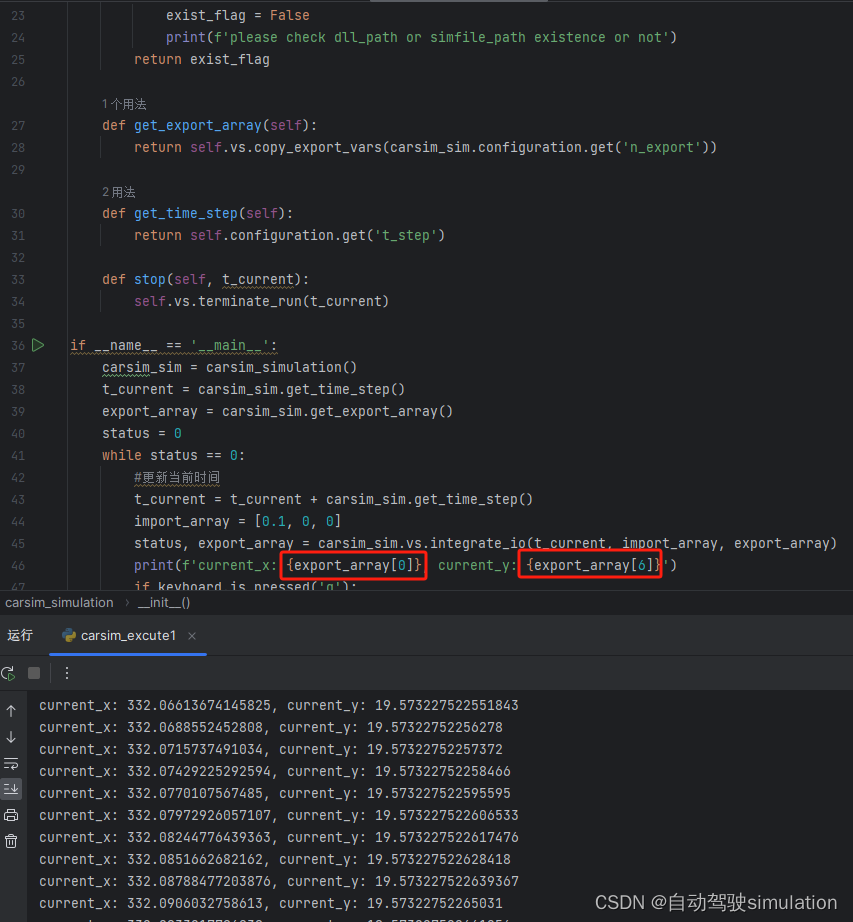
3 status, export_array = carsim_sim.vs.integrate_io(t_current, import_array, export_array)
print(f'current_x: {export_array[0]}, current_y: {export_array[6]}')
if keyboard.is_pressed('q'):
carsim_sim.stop(t_current)
break
四、运行carsim
1)运行carsim等待几秒会出现黑窗,然后关掉黑窗即可。
五、运行python
1)运行python脚本之后结果哗啦啦就出来了,就很简单。
六、补充vs_solver.py代码
# copyright (c) 2019-2020, mechanical simulation corporation
# all rights reserved.
#
# the software is provided "as is", without warranty of any kind, express or
# implied, including but not limited to the warranties of merchantability,
# fitness for a particular purpose and noninfringement. in no event shall the
# authors or copyright holders be liable for any claim, damages or other
# liability, whether in an action of contract, tort or otherwise, arising from,
# out of or in connection with the software or the use or other dealings in
# the software.
import ctypes
import sys,string,os,re
class vs_solver:
def __init__(self):
self.dll_handle = none
def get_api(self, dll_handle):
self.dll_handle = dll_handle
if dll_handle.vs_run is not none and \
dll_handle.vs_initialize is not none and \
dll_handle.vs_read_configuration is not none and \
dll_handle.vs_integrate_io is not none and \
dll_handle.vs_copy_export_vars is not none and \
dll_handle.vs_terminate_run is not none and \
dll_handle.vs_error_occurred is not none and \
dll_handle.vs_set_opt_error_dialog is not none and \
dll_handle.vs_get_error_message is not none and \
dll_handle.vs_road_l is not none:
dll_handle.vs_road_l.restype = ctypes.c_double
#vsimports = (ctypes.c_double*1)()
#vsexports = (ctypes.c_double*1)()
#dll_handle.vs_integrate_io.argtypes = [ctypes.c_double, ctypes.byref(vsimports), ctypes.byref(vsexports)]
##dll_handle.vs.integrate_io.argtypes = [ctypes.c_double, ctypes.c_int]
return true
else:
return false
def get_char_pointer(self, python_string):
# python version is greater or equal to 3.0 then we need to define the encoding when converting a string to
# bytes. once that is done we can convert the the python string to a char*.
if sys.version_info >= (3, 0):
char_pointer = ctypes.c_char_p(bytes(python_string, 'utf-8'))
else:
char_pointer = ctypes.c_char_p(bytes(python_string))
return char_pointer
def get_parameter_value(self, line):
index = line.find(' ')
if index >= 0:
return line[index:].strip()
else:
return none
def get_dll_path(self, path_to_sim_file):
dll_path = none
prog_dir = none
veh_code = none
product_name = none
product_ver = none
library_name = none
bitness_suffix = '_64' if ctypes.sizeof(ctypes.c_voidp) == 8 else '_32'
platform = sys.platform
sim_file = open(path_to_sim_file, 'r')
if (platform == 'linux'):
libfiletype = 'sofile'
else:
libfiletype = 'dllfile'
for line in sim_file:
if line.lstrip().startswith('progdir'):
prog_dir = self.get_parameter_value(line)
if prog_dir == '.':
prog_dir = os.getcwd()
elif line.lstrip().startswith(libfiletype):
dll_path = self.get_parameter_value(line)
elif line.lstrip().startswith('vehicle_code'):
veh_code = self.get_parameter_value(line)
elif line.lstrip().startswith('product_id'):
product_name = self.get_parameter_value(line)
elif line.lstrip().startswith('product_ver'):
product_ver = self.get_parameter_value(line)
sim_file.close()
if "tire" in veh_code:
if platform == 'linux':
library_name = 'libtire.so.%s'%(product_ver)
else:
library_name = "tire" + bitness_suffix
elif product_name == "carsim":
if platform == 'linux':
library_name = 'libcarsim.so.%s'%(product_ver)
else:
library_name = "carsim" + bitness_suffix
elif product_name == "trucksim":
if platform == 'linux':
library_name = 'libtrucksim.so.%s'%(product_ver)
else:
library_name = "trucksim" + bitness_suffix
elif product_name == "bikesim":
if platform == 'linux':
library_name = 'libbikesim.so.%s'%(product_ver)
else:
library_name = "bikesim" + bitness_suffix
else:
if platform == 'linux':
library_name = 'libcarsim.so.%s'%(product_ver)
else:
library_name = veh_code + bitness_suffix
if dll_path is none:
if sys.platform == 'linux':
dll_path = os.path.join(prog_dir, library_name);
else:
dll_path = os.path.join(prog_dir, "programs", "solvers", library_name + ".dll")
return dll_path
def run(self, path_to_sim_file):
error_occurred = 1
path_to_sim_file_ptr = self.get_char_pointer(path_to_sim_file)
if path_to_sim_file_ptr is not none:
error_occurred = self.dll_handle.vs_run(path_to_sim_file_ptr)
return error_occurred
def print_error(self):
error_string = ctypes.c_char_p(self.dll_handle.vs_get_error_message())
print(error_string.value.decode('ascii'))
def read_configuration(self, path_to_sim_file):
path_to_sim_file_ptr = self.get_char_pointer(path_to_sim_file)
platform = sys.platform
if path_to_sim_file_ptr is not none:
if platform == 'linux':
ref_n_import = ctypes.c_long()
ref_n_export = ctypes.c_longlong()
else:
ref_n_import = ctypes.c_int32()
ref_n_export = ctypes.c_int64()
ref_t_start = ctypes.c_double()
ref_t_stop = ctypes.c_double()
ref_t_step = ctypes.c_double()
self.dll_handle.vs_read_configuration(path_to_sim_file_ptr,
ctypes.byref(ref_n_import),
ctypes.byref(ref_n_export),
ctypes.byref(ref_t_start),
ctypes.byref(ref_t_stop),
ctypes.byref(ref_t_step))
configuration = {'n_import': ref_n_import.value,
'n_export': ref_n_export.value,
't_start': ref_t_start.value,
't_stop': ref_t_stop.value,
't_step': ref_t_step.value}
return configuration
def copy_export_vars(self, n_export):
export_array = (ctypes.c_double * n_export)()
self.dll_handle.vs_copy_export_vars(ctypes.cast(export_array, ctypes.pointer(ctypes.c_double)))
export_list = [export_array[i] for i in range(n_export)]
return export_list
def get_road_l(self, x, y):
x_c_double = ctypes.c_double(x)
y_c_double = ctypes.c_double(y)
c_double_return = self.dll_handle.vs_road_l(x_c_double, y_c_double)
return float(c_double_return)
def integrate_io(self, t_current, import_array, export_array):
t_current_c_double = ctypes.c_double(t_current)
import_c_double_array = (ctypes.c_double * len(import_array))(*import_array)
export_c_double_array = (ctypes.c_double * len(export_array))(*export_array)
c_integer_return = self.dll_handle.vs_integrate_io(t_current_c_double,
ctypes.byref(import_c_double_array),
ctypes.byref(export_c_double_array))
export_array = [export_c_double_array[i] for i in range(len(export_array))]
return c_integer_return, export_array
def initialize(self, t):
t_c_double = ctypes.c_double(t)
self.dll_handle.vs_initialize(t_c_double)
def terminate_run(self, t):
t_c_double = ctypes.c_double(t)
self.dll_handle.vs_terminate_run(t_c_double)
总结
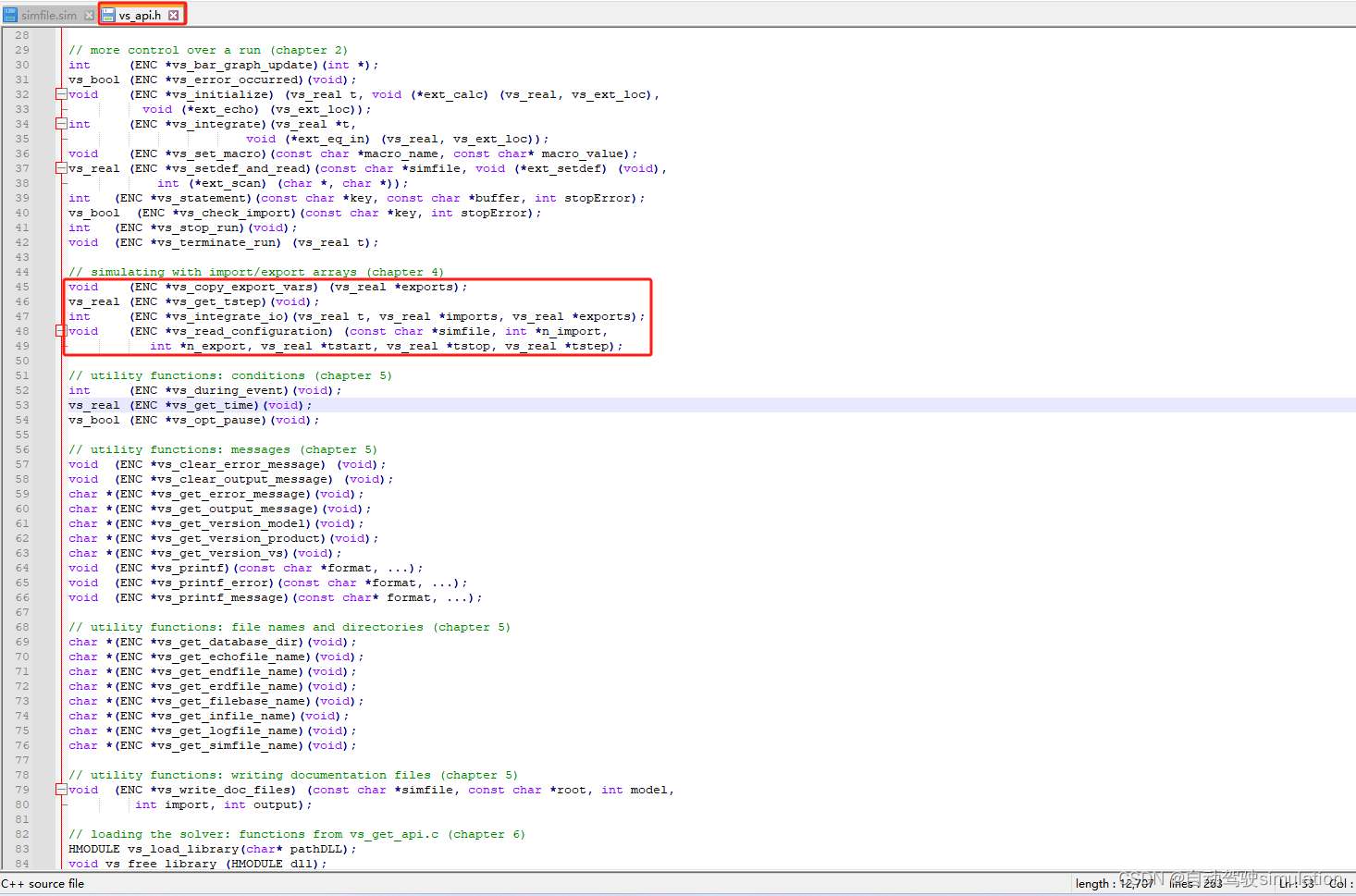
1、这里关于solvers的细节其实都没说,因为里面确实也没什么内容好讲的,本质就是调用carsim.dll,如果你需要更多的函数解析其实可以看vs_api.h,路径在c:\program files (x86)\carsim2022.1_data\extensions\custom_c\common,具体内容如下图所示。

发表评论