实战大数据:分布式大数据分析处理系统的开发与应用
2024-07-28 18:26 | 分类:硬件开发 | 评论:0 次 | 浏览: 136
大数据和分布式系统的发展为数据驱动的决策和创新提供了强大的工具。未来,随着技术的不断进步,大数据技术将会在更多领域发挥重要作用,推动社会的进...

从零开始搭建LLaMA-Factory
2024-07-28 17:49 | 分类:硬件开发 | 评论:0 次 | 浏览: 182
(虽然理论上可以把cuda和cudnn安装在虚拟环境conda里,但不管是pip还是conda安装,不管怎么换源,速度奇慢无比,懒得折腾了。...
AI图书推荐:AI驱动增长—ChatGPT和Bard 用于企业流程自动化
2024-07-28 17:27 | 分类:硬件开发 | 评论:0 次 | 浏览: 137
这本书《AI驱动增长—ChatGPT和Bard 用于企业流程自动化》(ChatGPT and Bard for Business Autom...

【树莓派+OpenCV+STM32】智能小车巡线_提取线路数据并通过串口通信传输
2024-07-28 16:48 | 分类:硬件开发 | 评论:0 次 | 浏览: 151
本博客只是智能巡线小车中视觉的一部分,后续如果时间允许的话会将整个巡线的功能都写下来,同时之后如果有更好的图像处理代码我也会同步在此篇博客中...

深度学习自然语言处理(NLP)模型BERT:从理论到Pytorch实战
2024-07-28 16:02 | 分类:硬件开发 | 评论:0 次 | 浏览: 157
BERT(Bidirectional Encoder Representations from Transformers)是一种基于深度学习...

【目标检测】2024最新-用YOLOv8训练自己的数据集(保姆级教学)
2024-07-28 15:55 | 分类:硬件开发 | 评论:0 次 | 浏览: 115
本文章主要方便大家学会如何使用yolov8训练自己数据集得到识别模型,跟着步骤一步一步来基本没有问题,我用的IDE是Pycharm2024....

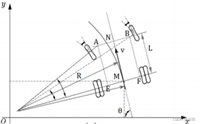
2024年华东杯B题数学建模论文:基于车辆运动学转弯模型的自动驾驶规划问题
2024-07-28 15:31 | 分类:硬件开发 | 评论:0 次 | 浏览: 137
随着自动驾驶技术的发展,车辆转弯问题成为关键挑战。本文针对自动驾驶车辆在转弯过程中的数学建模、路径规划及避障策略进行了深入研究,旨在提升自动...

【自然语言处理(NLP)实战】LSTM网络实现中文文本情感分析(手把手与教学超详细)
2024-07-28 15:27 | 分类:硬件开发 | 评论:0 次 | 浏览: 152
在当今数字化时代,人们在社交媒体、评论平台以及各类在线交流中产生了海量的文本数据。这些数据蕴含着丰富的情感信息,从而成为了深入理解用户态度、...

STM32智能小车(循迹、跟随、避障、测速、蓝牙、wifi、4g、语音识别)总结
2024-07-28 15:21 | 分类:硬件开发 | 评论:0 次 | 浏览: 137
STM32智能小车(循迹、跟随、避障、测速、蓝牙、wife、4g、语音识别)总结循迹小车循迹小车3.跟随/避障小车4.测速小车5.远程控制小...