极坐标的介绍
polarplane 是 manim(一个用于数学动画的python库)中的一个类,用于创建极坐标平面。与笛卡尔坐标系不同,极坐标系是基于角度和半径来定位点的。具体来说,这里的每个点由一个角度和距离原点的距离表示。
polarplane 的主要特性:
极坐标系:
polarplane用极径(r)和极角(θ)来展示坐标系,便于处理与角度和半径相关的数学概念。网格和坐标:它通常会显示一个网格,以帮助观众理解不同的极径和角度。
灵活性:可以与其他 manim 对象结合使用,可以在极坐标系中绘制图形或曲线。
使用场景:
- 显示极坐标相关的数学概念,如极函数、幅角等。
- 动画涉及到旋转或与角度相关的变化。
- 解析极坐标方程图像。
绘制极坐标的构造函数
构造函数:
polarplane(radius_max=4.0, size=none, radius_step=1, azimuth_step=none, azimuth_units='pi radians', azimuth_compact_fraction=true, azimuth_offset=0, azimuth_direction='ccw', azimuth_label_buff=0.1, azimuth_label_font_size=24, radius_config=none, background_line_style=none, faded_line_style=none, faded_line_ratio=1, make_smooth_after_applying_functions=true, **kwargs)
polarplane 类的构造函数接受多个参数,以便用户自定义极坐标平面的特性。下面是每个参数的解释:
参数解释
radius_max: 极坐标平面上半径的最大值。默认为
4.0。size: 极坐标平面的大小。如果未指定,通常会根据
radius_max自动计算。radius_step: 半径标记之间的间隔。例如,如果设置为
1,则每个单位的半径都会有标记。azimuth_step: 指定 azimuth(方位角)标记之间的角度步长,例如 30 度 (pi/6)。
azimuth_units: 指定方位角的单位,可以是
‘degrees’或‘pi radians’。默认为‘pi radians’。azimuth_compact_fraction: 是否以紧凑的分数形式显示方位角标签(例如,π/2 而不是 1.5708)。默认为
true。azimuth_offset: 方位角的偏移量,以弧度为单位。默认值为
0。azimuth_direction: 指定方位角的递增方向,可以是
'cw'(顺时针)或'ccw'(逆时针)。默认为'ccw'。azimuth_label_buff: 方位角标签与极坐标图的距离,增加此数值可以使标签更远离原点。
azimuth_label_font_size: 方位角标签的字体大小,默认为
24。radius_config: 自定义半径标记样式,可以是颜色、线条样式等。
background_line_style: 背景线的样式,通常用于极轨迹和背景网格的样式。
faded_line_style: 淡化线条的样式,通常用于控制一些辅助线的风格。
faded_line_ratio: 控制淡化线条的比例,默认值为
1。make_smooth_after_applying_functions: 在应用函数后是否使线条平滑,默认为
true。kwargs: 其他参数,传递给基类或其他组件。
示例代码1:
from manim import *
class polarplaneexample1122(scene):
def construct(self):
polarplane_pi01 = polarplane(
azimuth_units="pi radians",
size=5,
azimuth_label_font_size=33.6,
radius_config={"font_size": 33.6},
).add_coordinates()
self.add(polarplane_pi01)
polar_plane = polarplane(
#radius_max=7.5,
size=5,
radius_step=1, # 修改为1,显示更细的半径刻度
#azimuth_step=pi/5, # 修改为pi/4,显示更多的角度刻度
azimuth_units='pi radians',
#azimuth_compact_fraction=true,
#azimuth_offset=pi/4,
#azimuth_direction='ccw',
#azimuth_label_buff=0.9,
azimuth_label_font_size=33.6,
radius_config={"font_size": 33.6},
#radius_config={"color": blue},
#background_line_style={"stroke_color": grey_a, "stroke_width":10},
#faded_line_style={"stroke_color": grey_b, "stroke_width": 0.5},
#faded_line_ratio=0.5,
#make_smooth_after_applying_functions=true
).add_coordinates()
self.add(polar_plane)
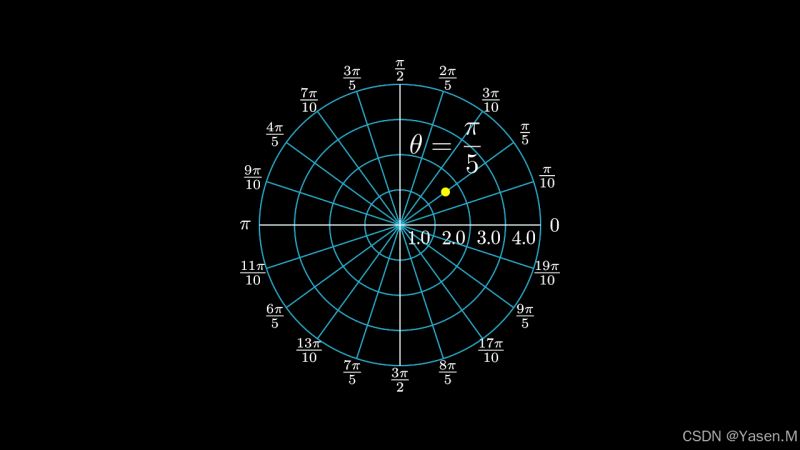
r = 1
theta = pi / 5
x = r * np.cos(theta)
y = r * np.sin(theta)
point = np.array([x, y, 0])
dot = dot(point, color=yellow)
self.add(dot)
angle_label = mathtex(r"\theta = \frac{\pi}{5}").next_to(dot, up)
self.add(angle_label)
%manim -qm -v warning polarplaneexample1122运行结果:
示例代码2:
from manim import *
class polarplaneexample2222(scene):
def construct(self):
# 创建极坐标平面
polar_plane = polarplane(azimuth_units="pi radians",
size=6,
azimuth_label_font_size=33.6,
radius_config={"font_size": 33.6}).add_coordinates()
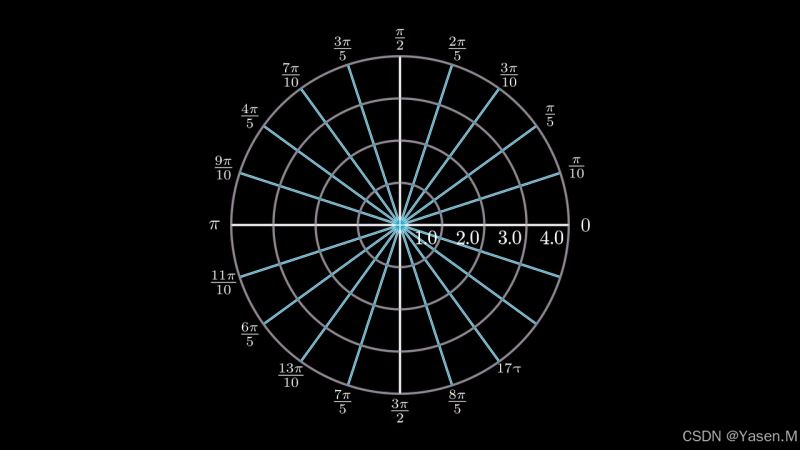
# 添加背景线条
self._init_background_lines(polar_plane)
# 获取轴并添加
axes = polar_plane.get_axes()
self.add(axes)
# 获取坐标标签并添加
coordinate_labels = polar_plane.get_coordinate_labels()
#self.add(coordinate_labels)
# 进行一些动画
self.play(create(polar_plane))
self.wait(2)
def _init_background_lines(self, polar_plane):
# 使用 _get_lines() 生成背景线条
non_faded_lines, faded_lines = polar_plane._get_lines()
# 添加非淡化线条
self.add(non_faded_lines)
# 添加淡化线条
self.add(faded_lines) 运行结果:
以上就是使用python创建极坐标平面的示例代码的详细内容,更多关于python创建极坐标平面的资料请关注代码网其它相关文章!






发表评论