【px4】ubuntu20.04+ros noetic 配置px4-v1.13和gazebo11联合仿真环境【教程】
文章目录
写在前面,目前中文互联网上关于px4飞控的学习资料较少,笔者查阅了大量的资料整理成这篇博客,贡献一些学习内容,码字不易,如果帮助到您,请您帮我点点赞。
0. 安装ubuntu+ros
安装ubuntu可以查看,安装ros可以查看,这里就不再赘述了。
1. 安装依赖
● 在使用apt安装的过程中(包括之后ros的安装),如果出现难以解决的依赖问题,可以使用aptitude install(没有aptitude的话,使用sudo apt install aptitude 安装),如sudo aptitude install ros-kinetic-desktop,它会依次推荐依赖解决方案,觉得可行就按y,不可行就按n。当然这个工具也不是万能的,如果它也解决不了依赖问题,还是需要靠自己分析解决。
● 有时候apt报错,提示“有几个软件包无法下载,要不运行 apt-get update 或者加上 --fix-missing 的选项再试试?”,这时按照提示进行操作即可。
● 注意仔细检查依赖都装成功没有,之前有些开发者遇到的编译过程中出现’pthread_create’未定义的引用,就是因为少装了依赖。
注意如果安装了anaconda等虚拟环境管理器,要退出虚拟环境的激活,再进行依赖的安装,一下的安装过程我们默认退出了anaconda的虚拟环境
比如我这里使用了anaconda包管理器,有一个虚拟环境base那么我需要推出这个虚拟环境再进行依赖的安装。
conda deactivate

然后进行依赖的安装
sudo apt install ninja-build exiftool ninja-build protobuf-compiler libeigen3-dev genromfs xmlstarlet libgstreamer1.0-dev libgstreamer-plugins-base1.0-dev python3-pip gawk
pip3 install pandas jinja2 pyserial cerberus pyulog==0.7.0 numpy toml pyquaternion empy pyyaml
pip3 install packaging numpy empy toml pyyaml jinja2 pyargparse kconfiglib jsonschema future
pip install --upgrade setuptools
#若未报错不需要输入这两行命令
python -m pip install --upgrade pip
2. 安装qgc地面站
安装的教程参考于qgc安装教程
sudo usermod -a -g dialout $user
sudo apt-get remove modemmanager -y
sudo apt install gstreamer1.0-plugins-bad gstreamer1.0-libav gstreamer1.0-gl -y
sudo apt install libqt5gui5 -y
sudo apt install libfuse2 -y
然后重启电脑,下载qgroundcontrol.appimage
使用终端命令安装(并运行):
chmod +x ./qgroundcontrol.appimage
./qgroundcontrol.appimage (or double click)
3. 配置px4-v1.13
3.1 安装px4
在创建工作空间之前一定要deactivate anaconda的虚拟环境
参考px4官网上的安装流程
1、下载px4源码
可以直接git进行下载,由于ros noetic自带gazebo11,所以我们不需要再额外安装gazebo
git clone https://github.com/px4/px4-autopilot.git --recursive
如果下载比较慢,可以使用我已经打包好的源码,提取码hola。
2、安装px4
然后,轻量安装(不安装 sim tool 和 nuttx)
bash ./px4-autopilot/tools/setup/ubuntu.sh --no-sim-tools --no-nuttx
3、安装相关依赖
然后安装一些依赖
sudo apt-get install protobuf-compiler libeigen3-dev libopencv-dev -y
4、编译px4固件
cd px4-autopilot
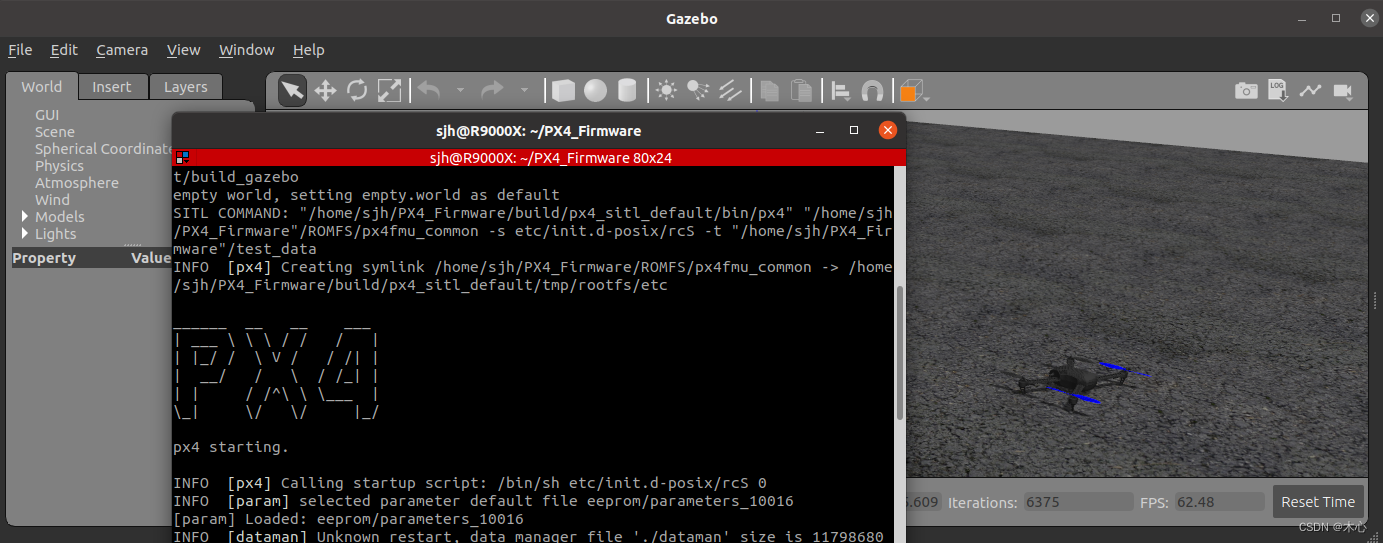
make px4_sitl_default gazebo
如果编译成功则会出现
然后退出gazebo,修改 ~/.bashrc,在文件的末尾加入以下代码, 如下的配置参考自px4论坛,如图所示
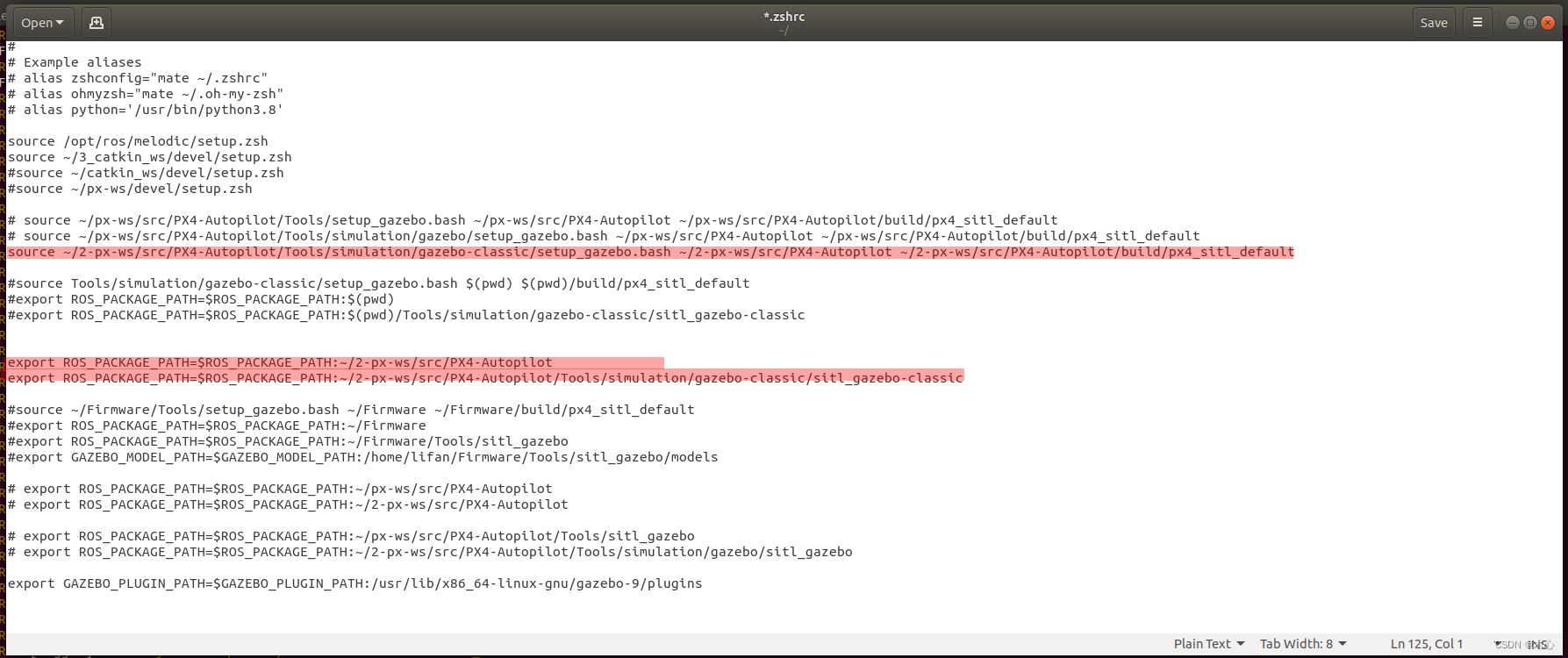
# >>> px4 initialize >>>
source ~/px4-autopilot/tools/simulation/gazebo-classic/setup_gazebo.bash ~/px4-autopilot ~/px4-autopilot/build/px4_sitl_default
export ros_package_path=$ros_package_path:~/px4-autopilot
export ros_package_path=$ros_package_path:~/px4-autopilot/tools/simulation/gazebo-classic/sitl_gazebo-classic
# <<< px4 initialize <<<
然后再
source ~/.bashrc
3.2 测试px4是否成功安装
首先启动qgc地面站,然后启动测试结点
roslaunch px4 mavros_posix_sitl.launch
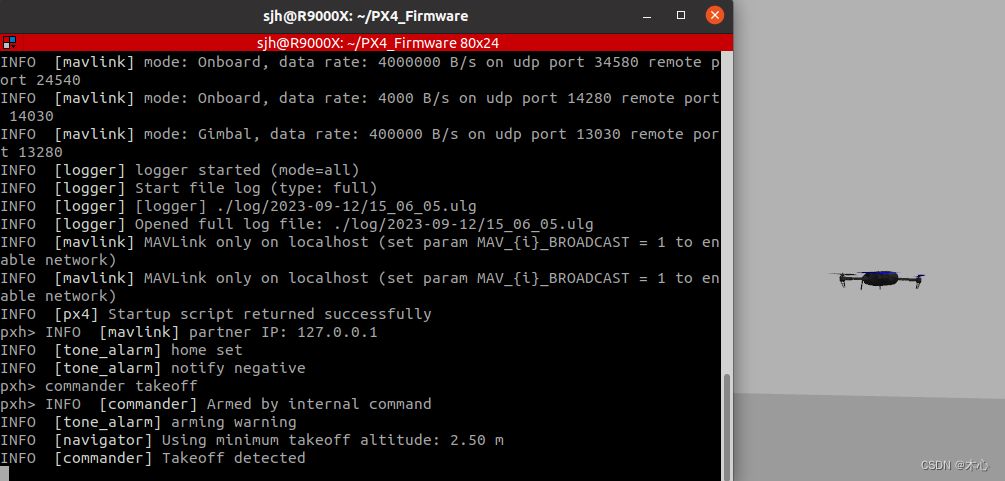
如果在终端输入
commander takeoff # 起飞
commander land # 降落
无人机将会起飞和降落,如下图所示
如果出现这种情况
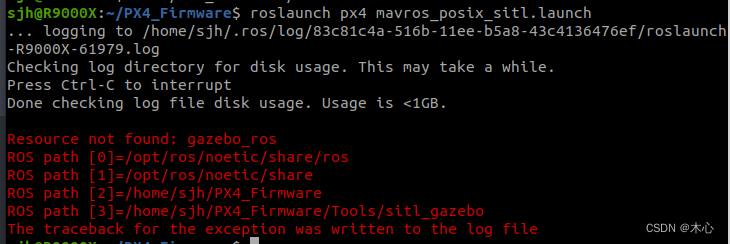
这个错误表明ros无法找到名为"gazebo_ros"的资源包。使用下面语句安装ros-noetic-gazebo-ros-pkgs
sudo apt-get install ros-noetic-gazebo-ros-pkgs # noetic
sudo apt-get install ros-melodic-gazebo-ros-pkgs # melodic
sudo apt-get install ros-kinetic-gazebo-ros-pkgs # kinetic
然后再次使用
roslaunch px4 mavros_posix_sitl.launch
即可成功启动
注意如果我们没有deactivate anaconda的虚拟环境,那么在启动中会报如下的错误,并且无法加载无人机模型
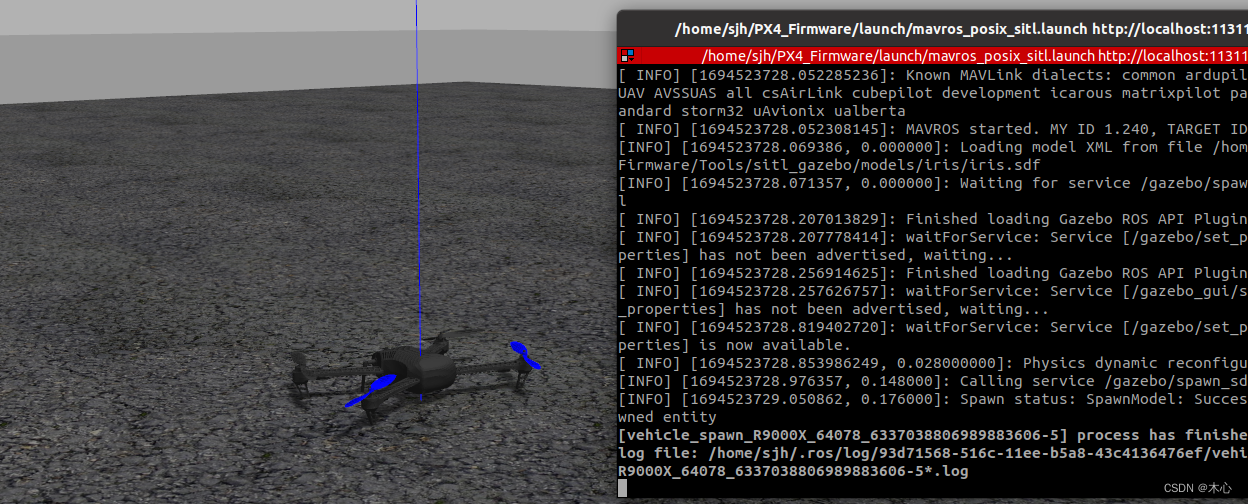
正确启动是不会报错的,并且会出现无人机的模型,如下所示
4. 配置px4-v1.12(推荐使用)
4.1 安装px4-v1.12
git clone https://github.com/px4/px4-autopilot.git
git status # 查看当前分支,位于origin/main
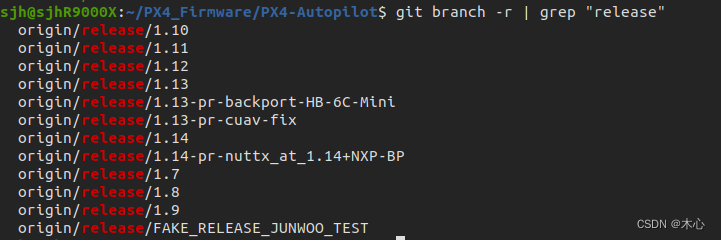
git branch -r | grep "release" # 查看所有远程分支,带release的
查看的结果如下所示,选择relase/1.12的稳定分支
然后进行切换分支
cd px4-autopilot
git checkout origin/release/1.12 # 切换到发行分支v1.12
git submodule update --init --recursive # 更新子模块
git status # 查看当前分支,位于release/1.12
4.2 配置px4
在~/.bashrc文件中加入
source ~/px4_firmware/px4-autopilot/tools/setup_gazebo.bash ~/px4_firmware/px4-autopilot ~/px4_firmware/px4-autopilot/build/px4_sitl_default
export ros_package_path=${ros_package_path}:~/px4_firmware/px4-autopilot
export ros_package_path=$ros_package_path:~/px4_firmware/px4-autopilot/tools/sitl_gazebo
5. 手动添加gazebo模型
手动添加gazebo模型文件,手动下载这个model.zip文件,提取码是hola
将该附件解压缩后放在~/.gazebo中,按住ctrl+h可以显示隐藏文件夹,此时在~/.gazebo/models/路径下可以看到很多模型。如果不做这一步,之后运行gazebo仿真,可能会缺模型,这时会自动下载,gazebo模型服务器在国外,自动下载会比较久。
在已经安装好ubuntu 20.04和ros noetic的前提下,如果我们是安装的是ros-noetic-desktop-full版本,那么就已经帮我安装好了gazebo11,我们首先查看我们自带的gazebo版本,在终端中输入
gazebo --version
便可以查看gazebo的版本, 如下
sjh@r9000x:~$ gazebo --version
gazebo multi-robot simulator, version 11.13.0
copyright (c) 2012 open source robotics foundation.
released under the apache 2 license.
6. 配置mavros
mavros的配置参考于mavros官网配置教程
6.1 安装mavros(源码安装方法)不推荐
1、首先创建工作空间
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws
catkin init
wstool init src
如果报错wstool not found,则需要先安装
sudo apt-get install python-catkin-tools python-rosinstall-generator -y
如果是第一次使用wstool,则还需要
wstool init ~/catkin_ws/src
2、下载mavros源码
rosinstall_generator --rosdistro kinetic mavlink | tee /tmp/mavros.rosinstall
# we use the kinetic reference for all ros distros as it's not distro-specific and up to date
rosinstall_generator --upstream mavros | tee -a /tmp/mavros.rosinstall
这里使用了kinetic版本来指代了所有ros的版本,无需我们自己指定,然后进入工作空间开始构建
wstool merge -t src /tmp/mavros.rosinstall
wstool update -t src -j4
rosdep install --from-paths src --ignore-src -y
3、安装剩余依赖
./src/mavros/mavros/scripts/install_geographiclib_datasets.sh
4、编译
cd ~/catkin_ws
catkin build
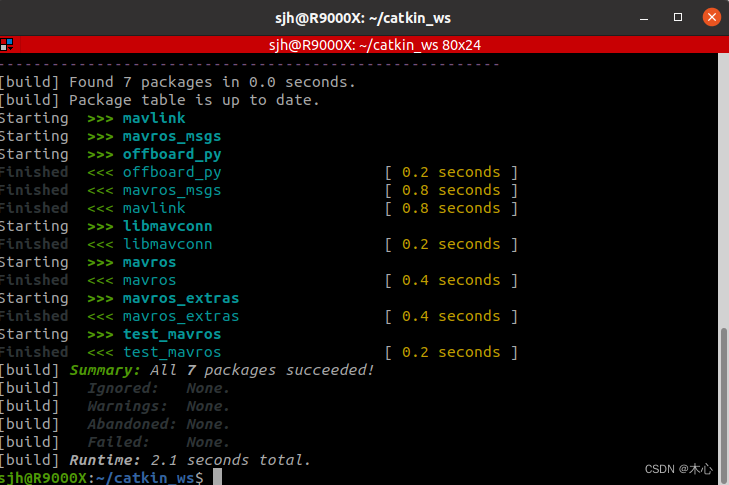
如果出现下列信息则表明编译成功,我这里不是首次编译,所以编译很快,首次编译会比较慢。
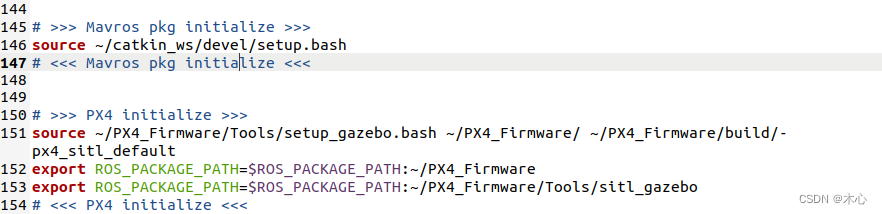
成功之后打开.bashrc文件,在其中写入
# >>> mavros pkg initialize >>>
source ~/catkin_ws/devel/setup.bash
# <<< mavros pkg initialize <<<
注意,这个一定要放置在px4之前,如下图所示
6.2 安装mavros(二进制安装方法)推荐
直接运行以下指令即可,参考自px4联合mavros教程
sudo apt-get install ros-noetic-mavros ros-noetic-mavros-extras ros-noetic-mavros-msgs
wget https://raw.githubusercontent.com/mavlink/mavros/master/mavros/scripts/install_geographiclib_datasets.sh
sudo chmod a+x ./install_geographiclib_datasets.sh
sudo ./install_geographiclib_datasets.sh
6.3 测试mavros
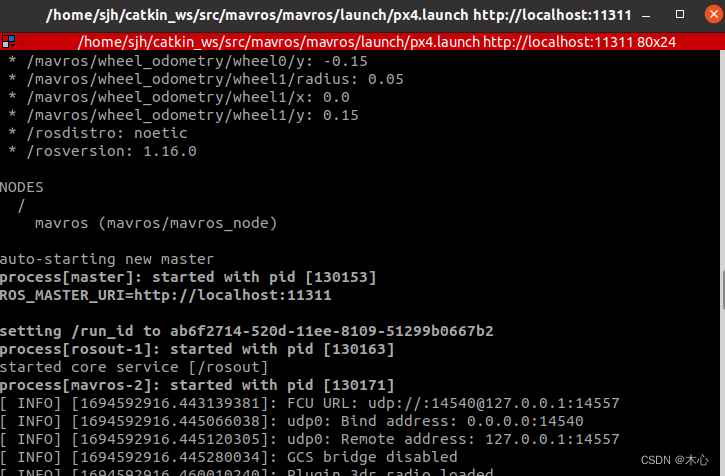
在终端输入
roslaunch mavros px4.launch fcu_url:="udp://:14540@127.0.0.1:14557"
来测试mavros是否安装成功,如果没有报错,那说明安装成功。如下所示
7. 测试mavros与sitl通信
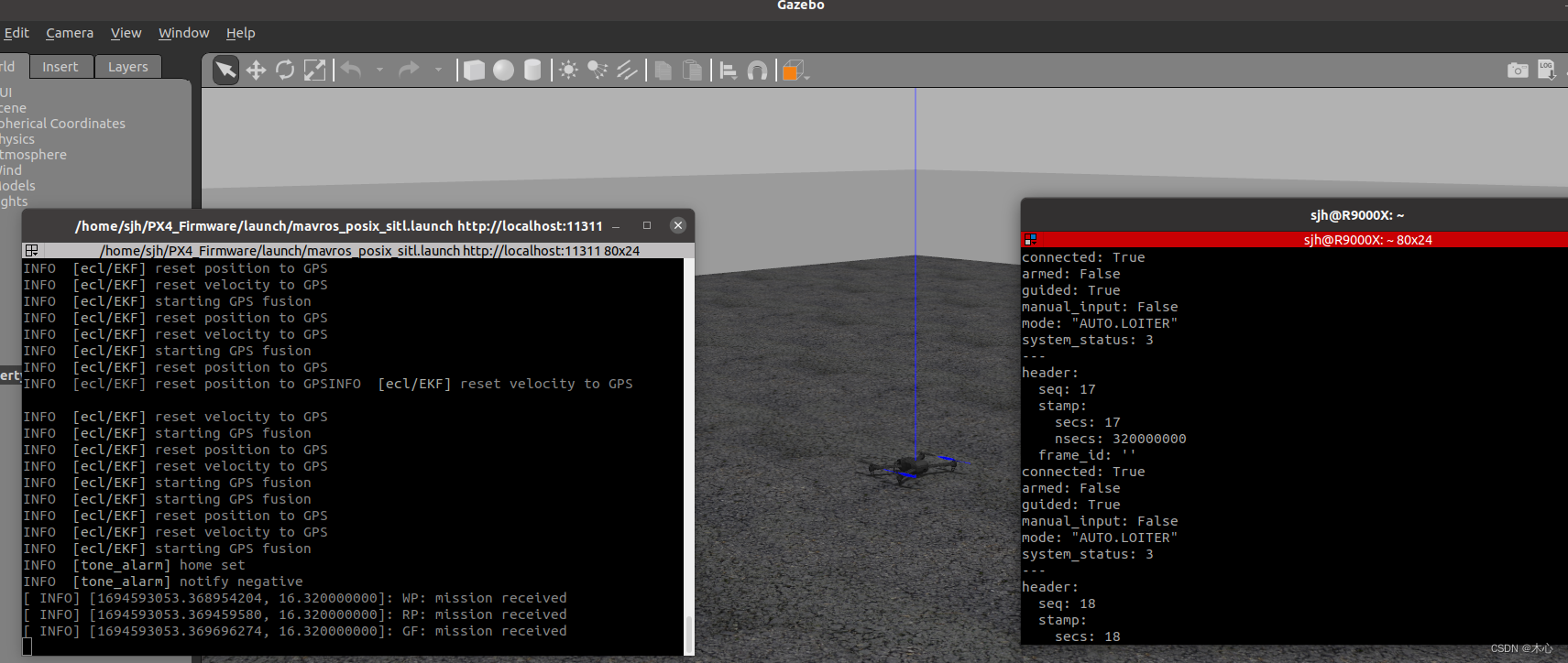
接下来我们测试mavros与sitl通信是否正常,先打开qgc地面站,然后输入
roslaunch px4 mavros_posix_sitl.launch
rostopic echo /mavros/state
如果出现了connected: true,则表明通信成功,如下所示。
如果在终端输入
commander takeoff # 起飞
commander land # 降落
无人机将会起飞和降落,并且mavros显示信息会发生变化。


发表评论