在使用直流有刷电机驱动芯片A4950时,这款芯片采用的是PWM控制方式,我发现他的正转、反转有两种控制方式,分别是快衰减和慢衰减。
1.引语
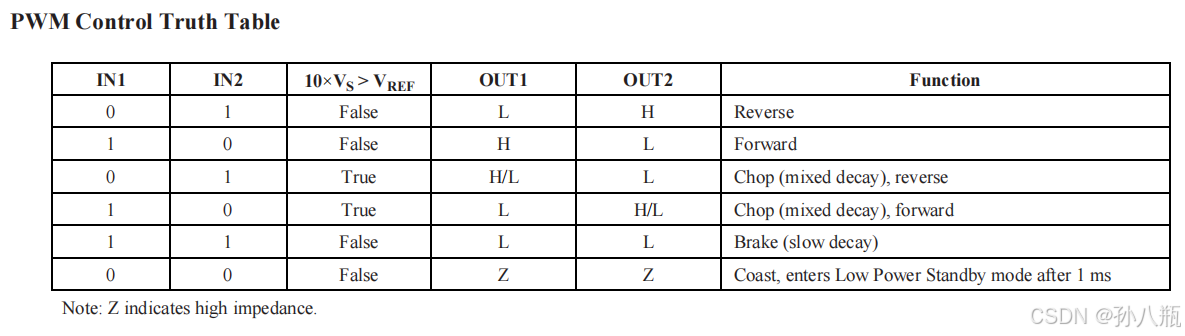
在使用直流有刷电机驱动芯片a4950时,这款芯片采用的是pwm控制方式,我发现他的正转、反转有两种控制方式,分别是快衰减和慢衰减。
2.理解
慢衰减:相当于加在电机(感性原件)两端电压消失,将电机两端正负短接。
快衰减:相当于加在电机(感性原件)两端电压消失,将电机两端快速接上与驱动电流相反的电流。
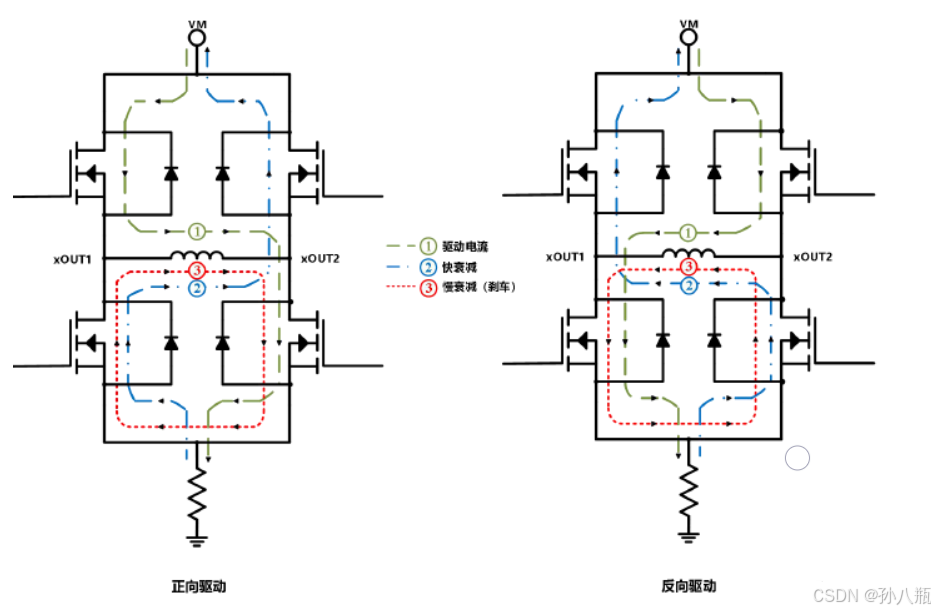
正转/快衰减,xout1的上桥功率管为pwm信号,下桥功率管为低电平,xout2的上桥臂功率管为低电平,下桥功率为高电平,电机驱动电流路径为正向驱动①所示。当有刷电机处于快衰减模式进行制动时,h桥所有功率管都关闭,电机线圈中的电流只能由功率管寄生的二极管中流过,电机电感上的电流通过路径②流进供电电源以及消耗在二极管上,因此电流会逐渐减小,这种衰减方式在电机上表现为电机滑行。
正转/慢衰减,正常驱动电流路径为正向驱动①所示,当有刷电机处于慢衰减模式进行制动时,h桥的上下桥功率管关断,下桥功率管均打开ÿ
相关文章:
-
在人类文明的长河中,农业始终是社会发展的基石,滋养着文明的繁荣与进步。从刀耕火种到现代农业,每一次技术的飞跃都深刻地改变了我们与土地、与自然的关系。而今,我们正站在一个前所未有的十…
-
在ArkUI中,UI显示的内容均为组件,由框架直接提供的称为系统组件,由开发者定义的称为自定义组件。在进行 UI 界面开发时,通常不是简单的将系统组件进行组合使用,而是需要考虑代码…
-
本文是我学习POMDP相关的笔记,由于个人能力所限,可能有所纰漏,还请批评指正。初学者,希望和大家共同学习.…
-

SpinalHDL之仿真(三)
将硬件中的 SpinalEnumCraft 读取出来并转换为 Scala 的SpinalEnumElement 值。必须注意的是,由于仿真器是事件驱动的,例如上...
[阅读全文]
-
例如,像猫和狗这样的一般概念在大脑中表现为通用的、平均的视觉动物图像,而特定的限定词,如“阿拉斯加雪橇犬”,提供了清晰度,类似于MMKG中的基于路径的图像检索。如果我们只知道独角兽…
-
版权声明:本文内容由互联网用户贡献,该文观点仅代表作者本人。本站仅提供信息存储服务,不拥有所有权,不承担相关法律责任。
如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 2386932994@qq.com 举报,一经查实将立刻删除。

发表评论