系列文章目录
文章目录
pwm和oc输出比较详解:
1. 直流电机和驱动简介
直流电机是一种将电能转换为机械能的设备,主要通过控制电压和电流来调节其速度和转向。电机的速度可以通过改变供电的电压或电流来控制,而转向可以通过改变电流方向来实现。电机通常由永磁体和旋转的电枢(带导体线圈的部分)组成,电流通过电枢导体产生磁场与永磁体互相作用产生力矩,从而驱动电机旋转。
因为直流电机属于大功率器件,gpio无法直接驱动,所以需要配合电机驱动。所以电机驱动是介于控制器(如微控制器)和电机之间的设备,作为电机的电源管理系统。驱动器负责接收低电压控制信号,并转换成可以直接驱动电机的高电压功率信号。驱动器能够控制电机的启动、停止、速度、扭矩和旋转方向。
市场上有很多类型的驱动,例如tb6612、l911、l298n、drv8833等等。tb6612是一款小型、高效的电机驱动芯片,适用于小型直流电机或步进电机。它可以处理较高的电流和电压,同时还提供过热保护和欠压锁定功能。tb6612芯片具有两个h桥,可以驱动两个电机或一个双向电机。
驱动电路中使用的h桥结构用于控制电机的旋转方向。通过在h桥的四个开关之间切换(这些开关通常是晶体管或mosfet),可以改变流经电机的电流方向。h桥也可以用来实现pwm调速,即通过调节开关的开合时间比例来控制电机的平均电压和速度。
2. 驱动电路原理
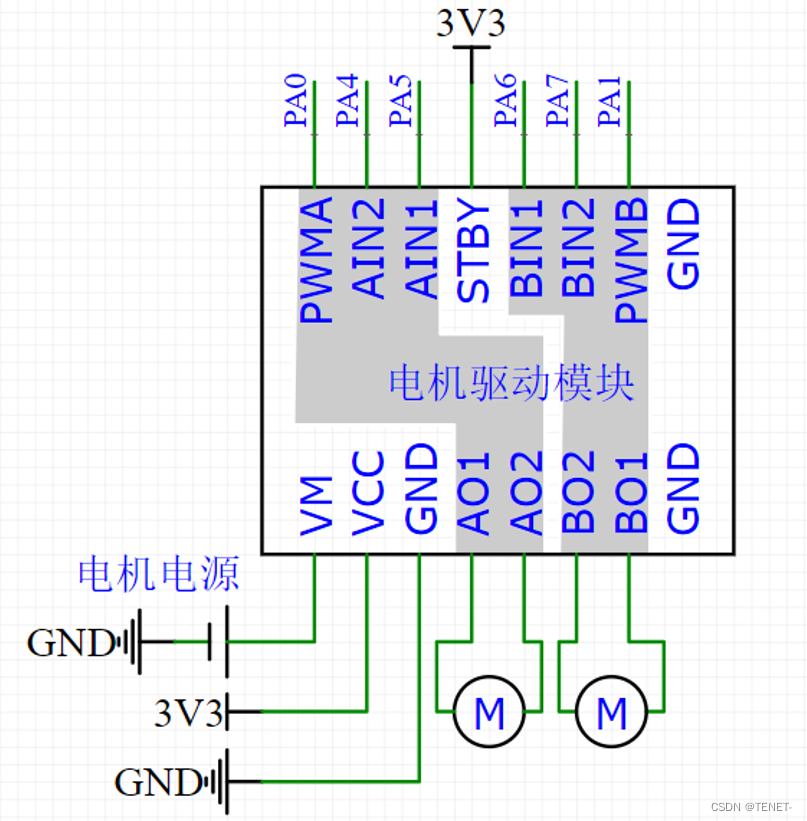
上图为tb6612的硬件电路,其中:
- vm: 电机供电输入,通常需要提供4.5-10v的直流电压。
- vcc: 逻辑供电输入,用于ic内部逻辑电路,电压范围通常是2.7-5.5v,和主控使用同一个电源。
- gnd: 接地引脚。
- stby: 待机模式控制引脚,当此引脚为高电平时,电机驱动器工作;为低电平时,驱动器处于待机状态。如果不需要这个功能直接接3.3v即可。
- pwma/b: pwm信号输入,用于控制电机的速度。
- ain1/a2, bin1/b2: 电机旋转方向控制输入,通过改变这些引脚的高低电平,可以控制电机的旋转方向。这两个信号和pwma一起,通过低功率的控制信号来控制vm将电路输入给ao端,实现控制大功率设备。
- ao1/ao2, bo1/bo2: 连接到电机的输出引脚。
| stm32 | 电机 | 驱动 |
| / | / | vm(4.5-10v) |
| 3.3v | / | vcc |
| gnd | / | gnd |
| / | 电机1 | ao1/ao2 |
| / | 电机2 | bo1/bo2 |
| pa0 | / | pwma |
| pa4 | / | ain2 |
| pa5 | / | ain1 |
| pa1 | / | pwmb |
| pa6 | / | bin1 |
| pa7 | / | bin2 |
| 3.3v | / | stby |
下图解释了不同的高低电平输入,对应的电机状态。

3. 代码实现
代码实现的功能为:
要使用的库函数文件依然为:stm32f10x_tim.h,拖到最下面,在这里可以找到定时器tim需要使用到的函数。
3.1 pwm.c
#include "stm32f10x.h" // device header
//pwm初始化
void pwm_init(void)
{
//开启时钟
rcc_apb1periphclockcmd(rcc_apb1periph_tim2, enable); //开启tim2的时钟
rcc_apb2periphclockcmd(rcc_apb2periph_gpioa, enable); //开启gpioa的时钟
//gpio初始化
gpio_inittypedef gpio_initstructure;
gpio_initstructure.gpio_mode = gpio_mode_af_pp;
gpio_initstructure.gpio_pin = gpio_pin_2;
gpio_initstructure.gpio_speed = gpio_speed_50mhz;
gpio_init(gpioa, &gpio_initstructure); //将pa2引脚初始化为复用推挽输出
//受外设控制的引脚,均需要配置为复用模式
//配置时钟源
tim_internalclockconfig(tim2); //选择tim2为内部时钟,若不调用此函数,tim默认也为内部时钟
//时基单元初始化
tim_timebaseinittypedef tim_timebaseinitstructure; //定义结构体变量
tim_timebaseinitstructure.tim_clockdivision = tim_ckd_div1; //时钟分频,选择不分频,此参数用于配置滤波器时钟,不影响时基单元功能
tim_timebaseinitstructure.tim_countermode = tim_countermode_up; //计数器模式,选择向上计数
tim_timebaseinitstructure.tim_period = 100 - 1; //计数周期,即arr的值
tim_timebaseinitstructure.tim_prescaler = 36 - 1; //预分频器,即psc的值
tim_timebaseinitstructure.tim_repetitioncounter = 0; //重复计数器,高级定时器才会用到
tim_timebaseinit(tim2, &tim_timebaseinitstructure); //将结构体变量交给tim_timebaseinit,配置tim2的时基单元
//输出比较初始化
tim_ocinittypedef tim_ocinitstructure; //定义结构体变量
tim_ocstructinit(&tim_ocinitstructure); //结构体初始化,若结构体没有完整赋值
//则最好执行此函数,给结构体所有成员都赋一个默认值
//避免结构体初值不确定的问题
tim_ocinitstructure.tim_ocmode = tim_ocmode_pwm1; //输出比较模式,选择pwm模式1
tim_ocinitstructure.tim_ocpolarity = tim_ocpolarity_high; //输出极性,选择为高,若选择极性为低,则输出高低电平取反
tim_ocinitstructure.tim_outputstate = tim_outputstate_enable; //输出使能
tim_ocinitstructure.tim_pulse = 0; //初始的ccr值
tim_oc3init(tim2, &tim_ocinitstructure); //将结构体变量交给tim_oc3init,配置tim2的输出比较通道3
//tim使能
tim_cmd(tim2, enable); //使能tim2,定时器开始运行
}
//pwm设置ccr
void pwm_setcompare3(uint16_t compare)
{
tim_setcompare3(tim2, compare); //设置ccr3的值
}
rcc_apb1periphclockcmd
- tim2 代表定时器2,它是stm32的一个基础硬件定时器。在stm32的某些系列中,tim2连接到的是apb1总线。
- enable 是一个宏定义,用来开启某项功能,这里用来开启tim2的时钟。如果传递 disable 则会关闭外设的时钟。
- 简单来说,rcc_apb1periphclockcmd(rcc_apb1periph_tim2, enable); 这行代码的作用是开启连接到apb1总线的定时器2(tim2)的时钟。只有开启了时钟,程序中关于tim2的其他功能(如计时、计数、pwm发生等)才能正常工作。
gpio_initstructure.gpio_mode = gpio_mode_af_pp;
- gpio的初始化中,选择af_pp复用推挽输出,因为对于普通的开漏推挽输出,引脚的控制权是来自于输出数据寄存器的,如果想用定时器来控制引脚,就需要使用复用开漏/推挽输出模式。
时基单元中的数值设置:
代入公式为:
- 频率 = ck_psc(72m) / (psc + 1) / (arr + 1)
- 占空比 = ccr / (arr + 1)
- 分辨率为 = 1 / (arr + 1)
- 电机在转动时,如果不想听到电机转动的声音,可以提高pwm,人耳能听到到声音频率为:20hz - 20000hz。可以通过减小预分频器来实现,这样可以在提高频率的同时,不影响占空比。
- 720 代表1000hz,代码中使用36代表20khz。
3.2 pwm.h
接着是pwm.h文件,这部分引用声明一下即可
#ifndef __pwm_h
#define __pwm_h
void pwm_init(void);
void pwm_setcompare3(uint16_t compare);
#endif
3.3 motor.c
#include "stm32f10x.h" // device header
#include "pwm.h"
//直流电机初始化
void motor_init(void)
{
//开启时钟
rcc_apb2periphclockcmd(rcc_apb2periph_gpioa, enable); //开启gpioa的时钟
gpio_inittypedef gpio_initstructure;
gpio_initstructure.gpio_mode = gpio_mode_out_pp;
gpio_initstructure.gpio_pin = gpio_pin_4 | gpio_pin_5;
gpio_initstructure.gpio_speed = gpio_speed_50mhz;
gpio_init(gpioa, &gpio_initstructure); //将pa4和pa5引脚初始化为推挽输出
pwm_init(); //初始化直流电机的底层pwm
}
//直流电机设置速度
void motor_setspeed(int8_t speed)
{
if (speed >= 0) //如果设置正转的速度值
{
gpio_setbits(gpioa, gpio_pin_4); //pa4置高电平
gpio_resetbits(gpioa, gpio_pin_5); //pa5置低电平,设置方向为正转
pwm_setcompare3(speed); //pwm设置为速度值
}
else //否则,即设置反转的速度值
{
gpio_resetbits(gpioa, gpio_pin_4); //pa4置低电平
gpio_setbits(gpioa, gpio_pin_5); //pa5置高电平,设置方向为反转
pwm_setcompare3(-speed); //pwm设置为负的速度值,因为此时速度值为负数,而pwm只能给正数
}
}
3.4 motor.h
同样进行声明。
#ifndef __motor_h
#define __motor_h
void motor_init(void);
void motor_setspeed(int8_t speed);
#endif
3.5 main.c
主函数中要注意的是:速度大于100时,会立刻反转,如果电机供电不足可能会导致损坏。
#include "stm32f10x.h" // device header
#include "delay.h"
#include "oled.h"
#include "motor.h"
#include "key.h"
uint8_t keynum; //定义用于接收按键键码的变量
int8_t speed; //定义速度变量
int main(void)
{
//模块初始化
oled_init(); //oled初始化
motor_init(); //直流电机初始化
key_init(); //按键初始化
//显示静态字符串
oled_showstring(1, 1, "speed:"); //1行1列显示字符串speed:
while (1)
{
keynum = key_getnum(); //获取按键键码
if (keynum == 1) //按键1按下
{
speed += 20; //速度变量自增20
if (speed > 100) //速度变量超过100后
{
speed = -100; //速度变量变为-100
//此操作会让电机旋转方向突然改变,可能会因供电不足而导致单片机复位
//若出现了此现象,则应避免使用这样的操作
}
}
motor_setspeed(speed); //设置直流电机的速度为速度变量
oled_showsignednum(1, 7, speed, 3); //oled显示速度变量
}
}
3.6 完整工程文件




发表评论