目录
3.4、数据长度和时间戳寄存器(can_(t/r)dtxr)
3.9、can过滤器fifo关联寄存器(can_ffa1r)
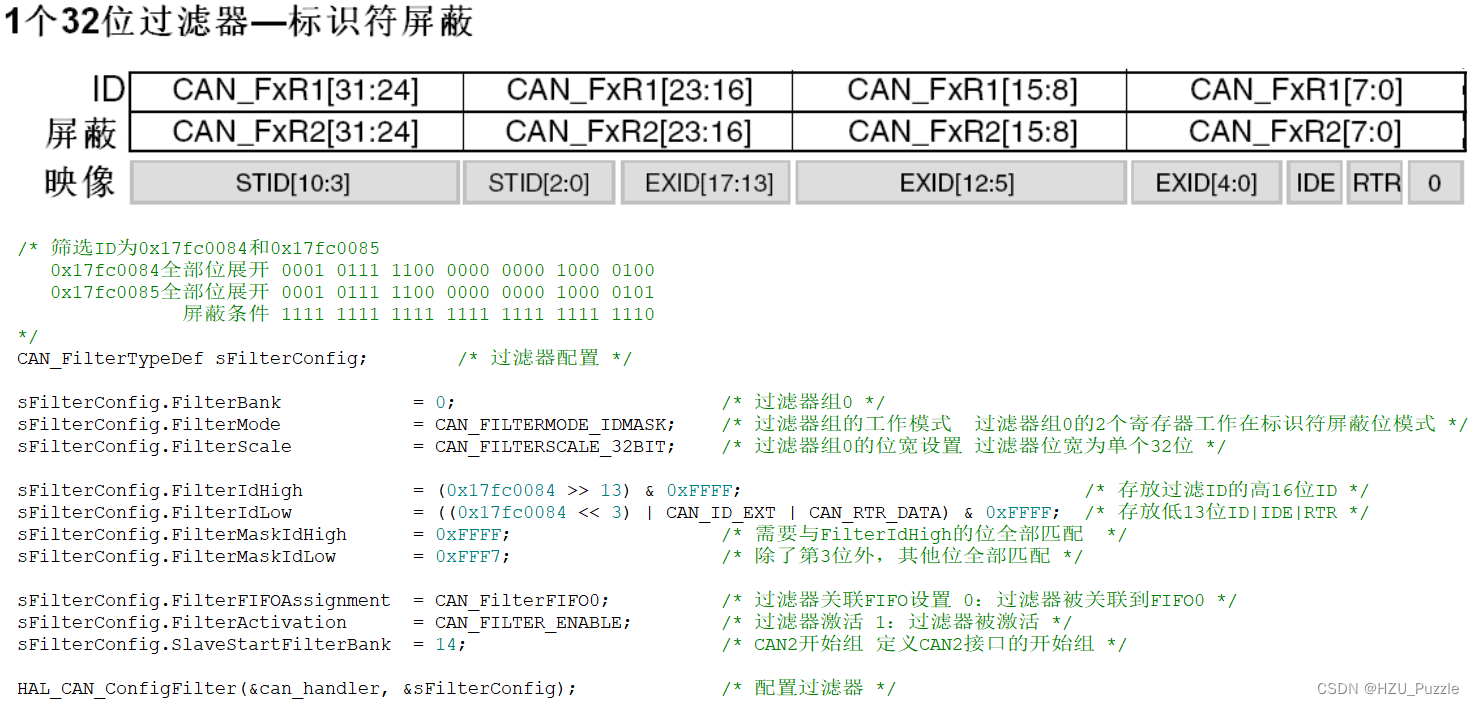
3.11、can过滤器组x寄存器(can_fxr(1/2))
一、can基础知识介绍
1.1、can介绍
can(controller area network),是iso国际标准化的串行通信协议。
为了满足汽车产业的“减少线束的数量”、“通过多个 lan,进行大量数据的高速通信”的需求。

can fd 通信速率可达 5mbps,并且兼容经典 can,遵循 iso 11898-1 做数据收发
can总线拓扑图
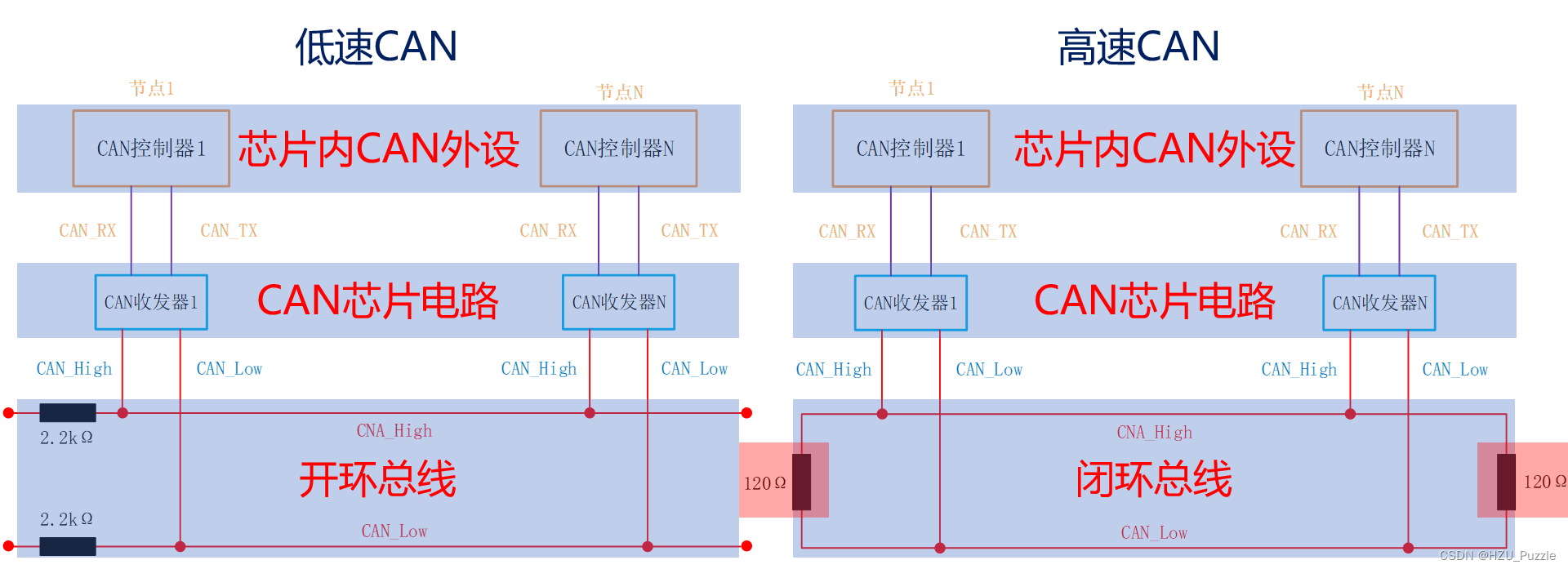
终端电阻,用于阻抗匹配,以减少回波反射
can总线特点
can 总线协议已广泛应用在汽车电子、工业自动化、船舶、医疗设备、工业设备等方面
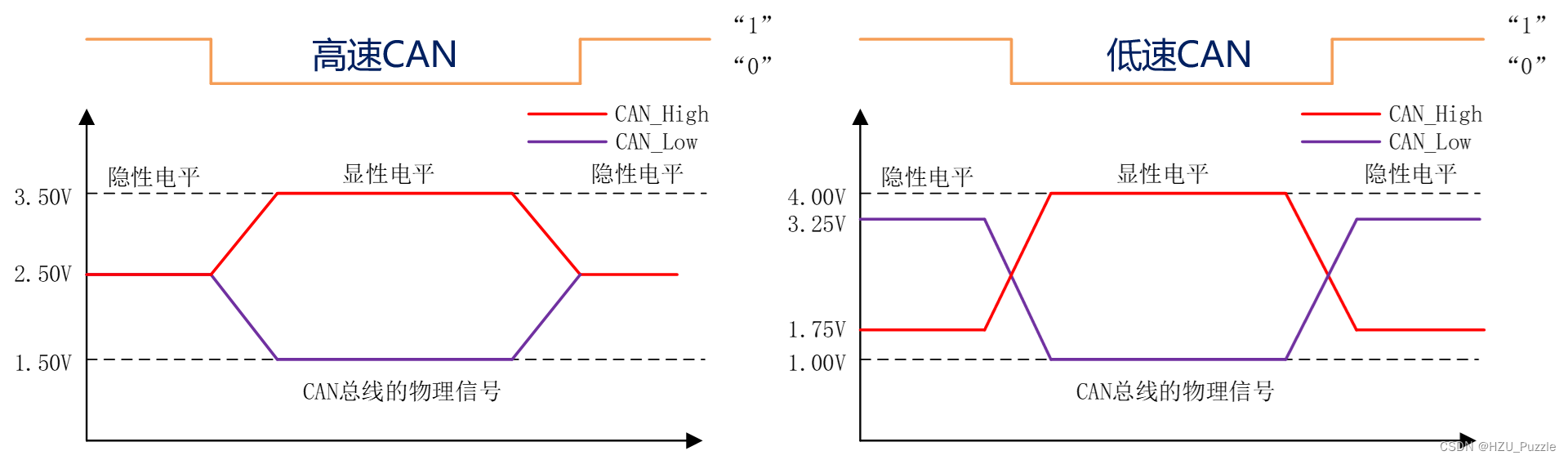
1.2、can物理层

1.3、can协议层
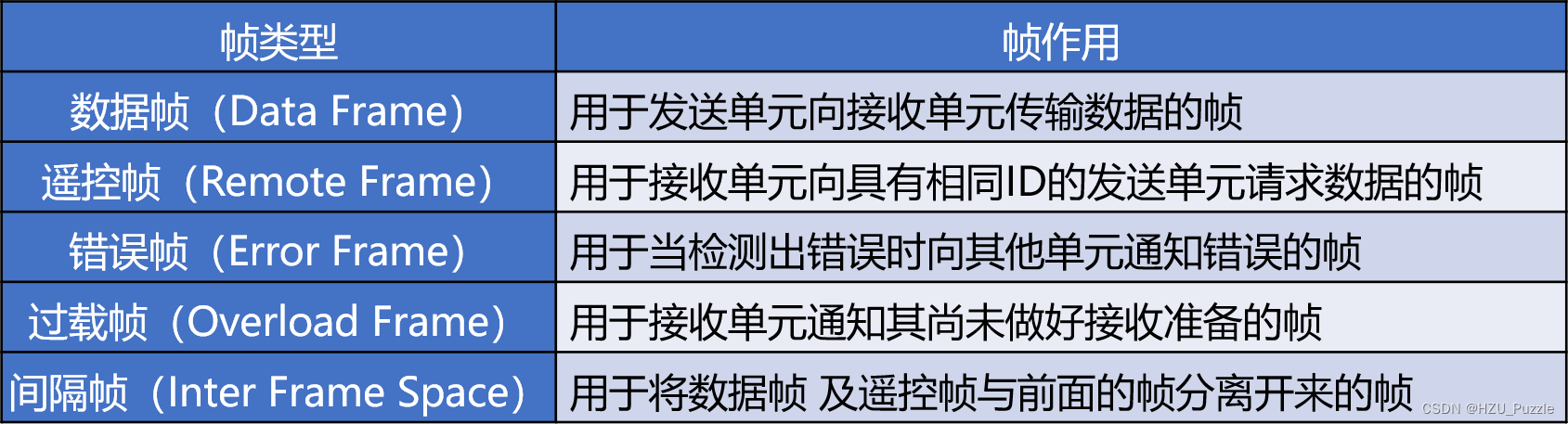
1.3.1、can帧种类介绍
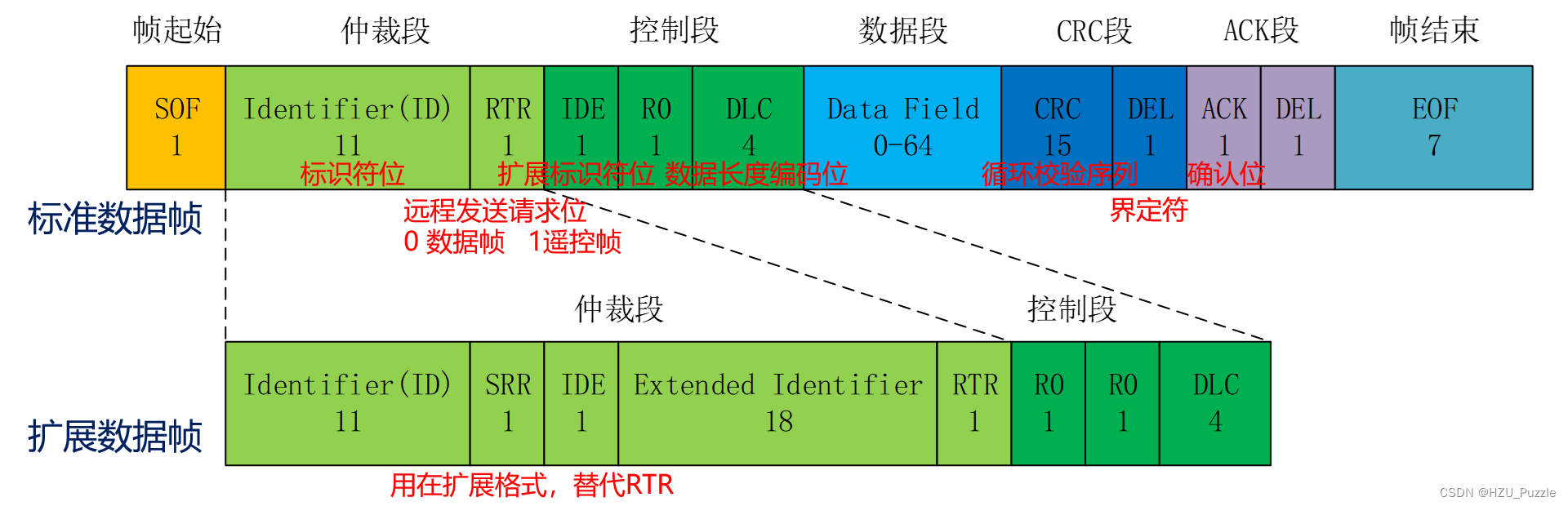
1.3.2、can数据帧介绍
数据帧由 7 段组成。数据帧又分为标准帧(can2.0a)和扩展帧(can2.0b),主要体现在仲裁段和控制段:
1.3.3、can位时序介绍
can 总线以“位同步”机制,实现对电平的正确采样。位数据都由四段组成:同步段(ss)、传播时间段(pts)、相位缓冲段1(pbs1)和相位缓冲段2(pbs2),每段又由多个位时序 tq 组成
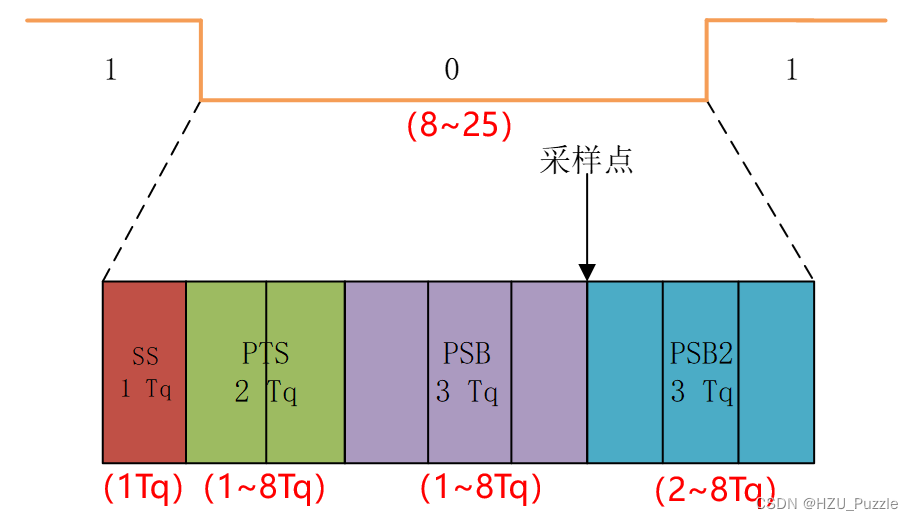
采样点是指读取总线电平,并将读到的电平作为位值的点,根据位时序,就可以计算 can 通信的波特率
数据同步过程(时钟频率误差、传输上的相位延迟引起偏差)
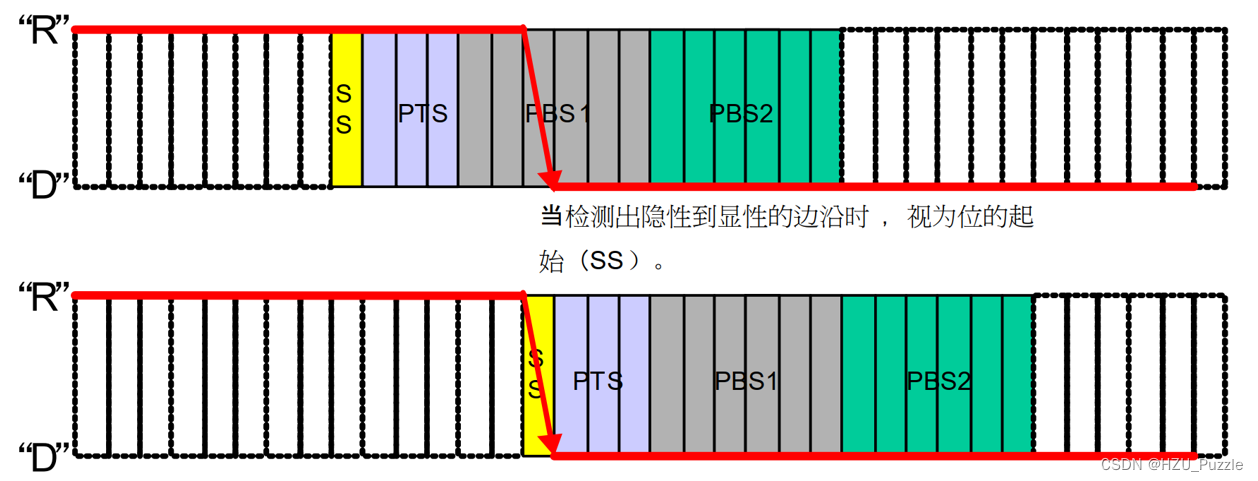
can为了实现对总线电平信号的正确采样,数据同步分为硬件同步和再同步
硬件同步
节点通过 can 总线发送数据,一开始发送帧起始信号。总线上其他节点会检测帧起始信号在不在位数据的 ss 段内,判断内部时序与总线是否同步
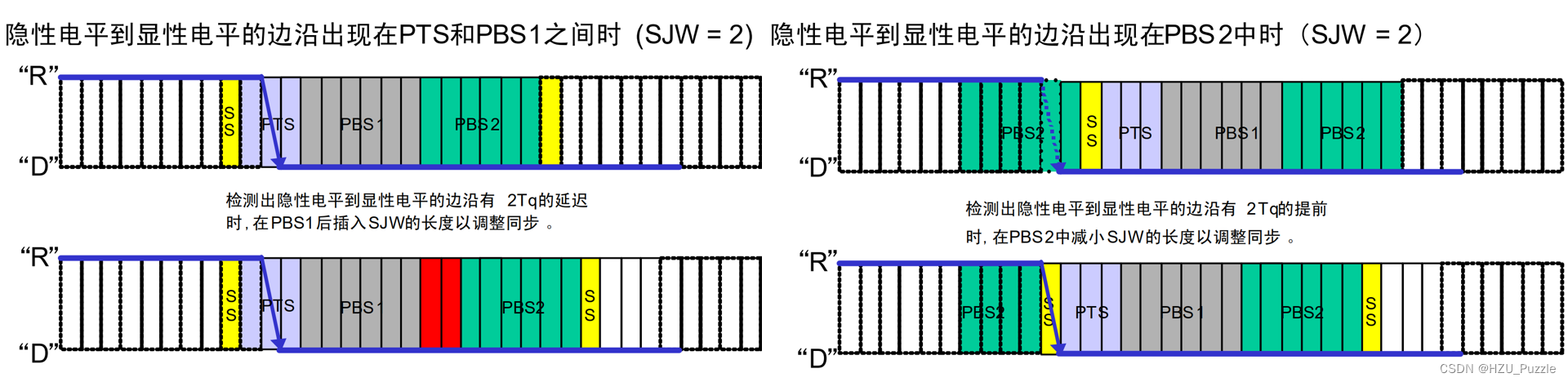
再同步
再同步利用普通数据位的边沿信号(帧起始信号是特殊的边沿信号)进行同步。再同步的方式分为两种情况:超前和滞后,即边沿信号与 ss 段的相对位置
1.3.4、can总线仲裁(优先级)

竞争失败单元,会自动检测总线空闲,在第一时间再次尝试发送
二、stm32 can控制器介绍
2.1、can控制器介绍
stm32 can 控制器(bxcan),支持 can 2.0a 和 can 2.0b active 版本协议
bxcan 主要特点
2.2、can控制器模式
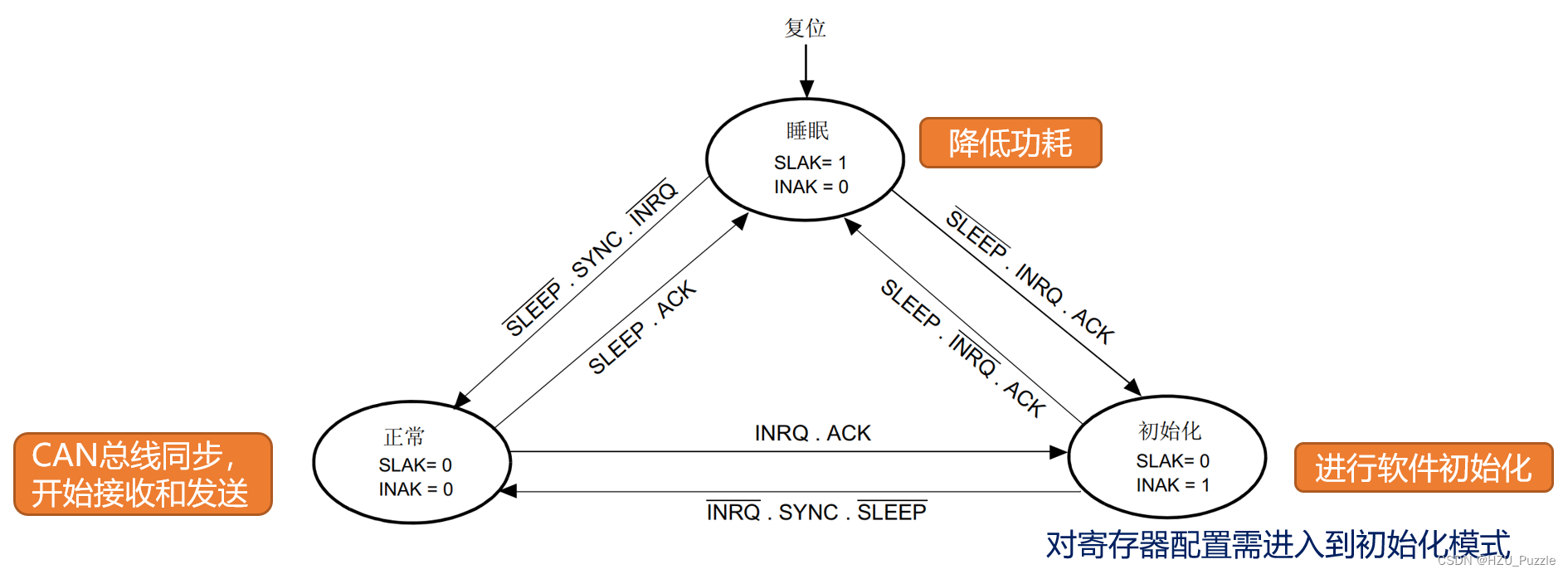
2.2.1、can控制器工作模式
can 控制器的工作模式有三种:初始化模式、正常模式和睡眠模式
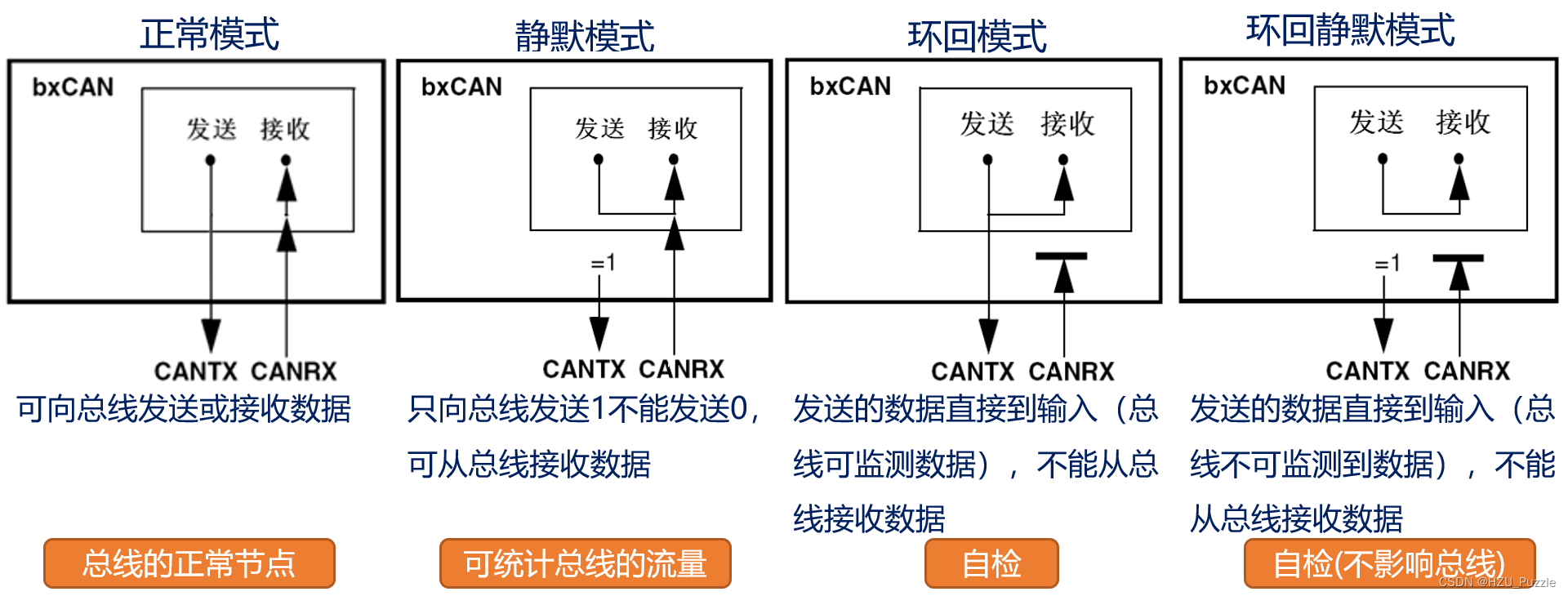
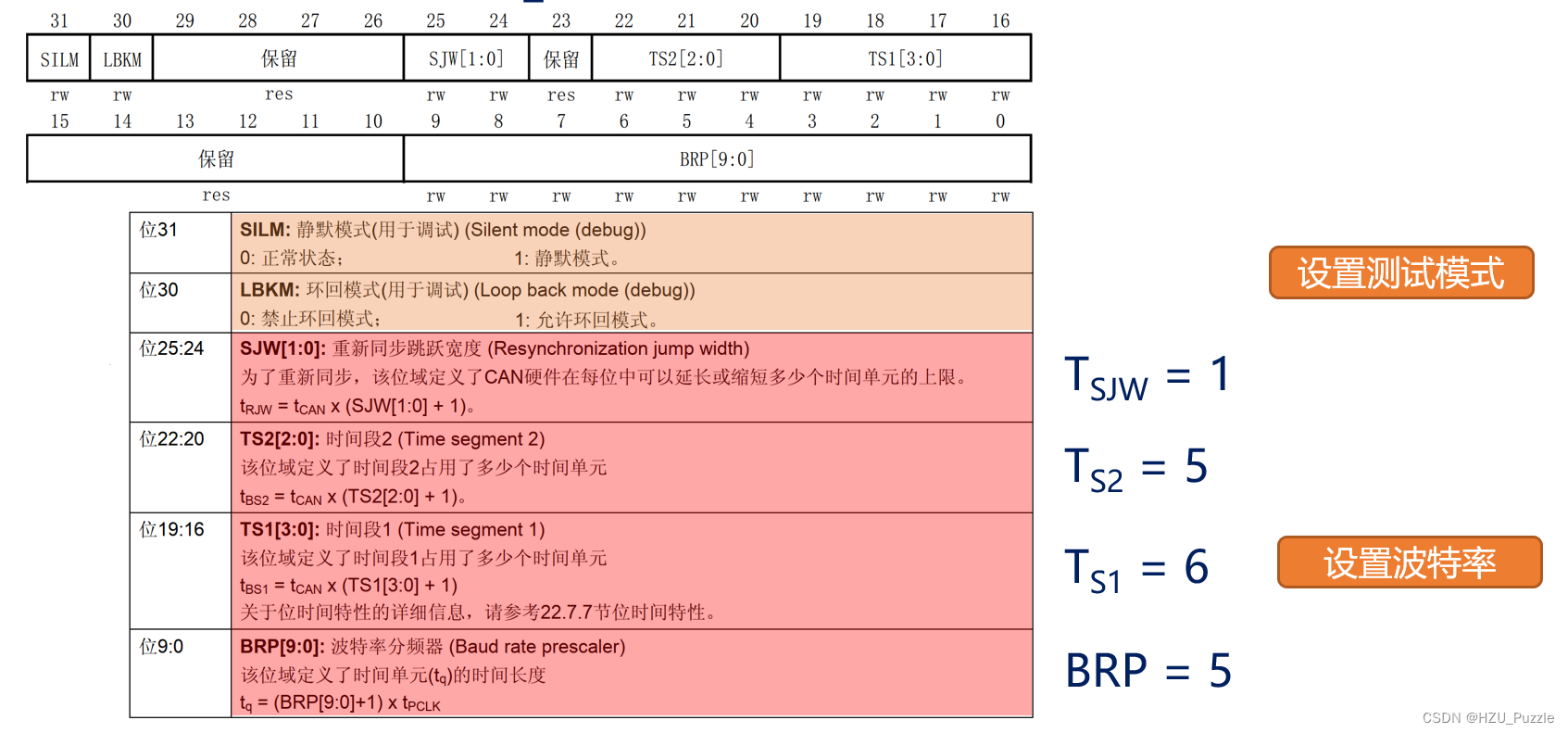
2.2.2、can控制器测试模式
can 控制器的测试模式有三种:静默模式、环回模式和环回静默模式(初始化模式下进行配置)
2.3、can控制器框图
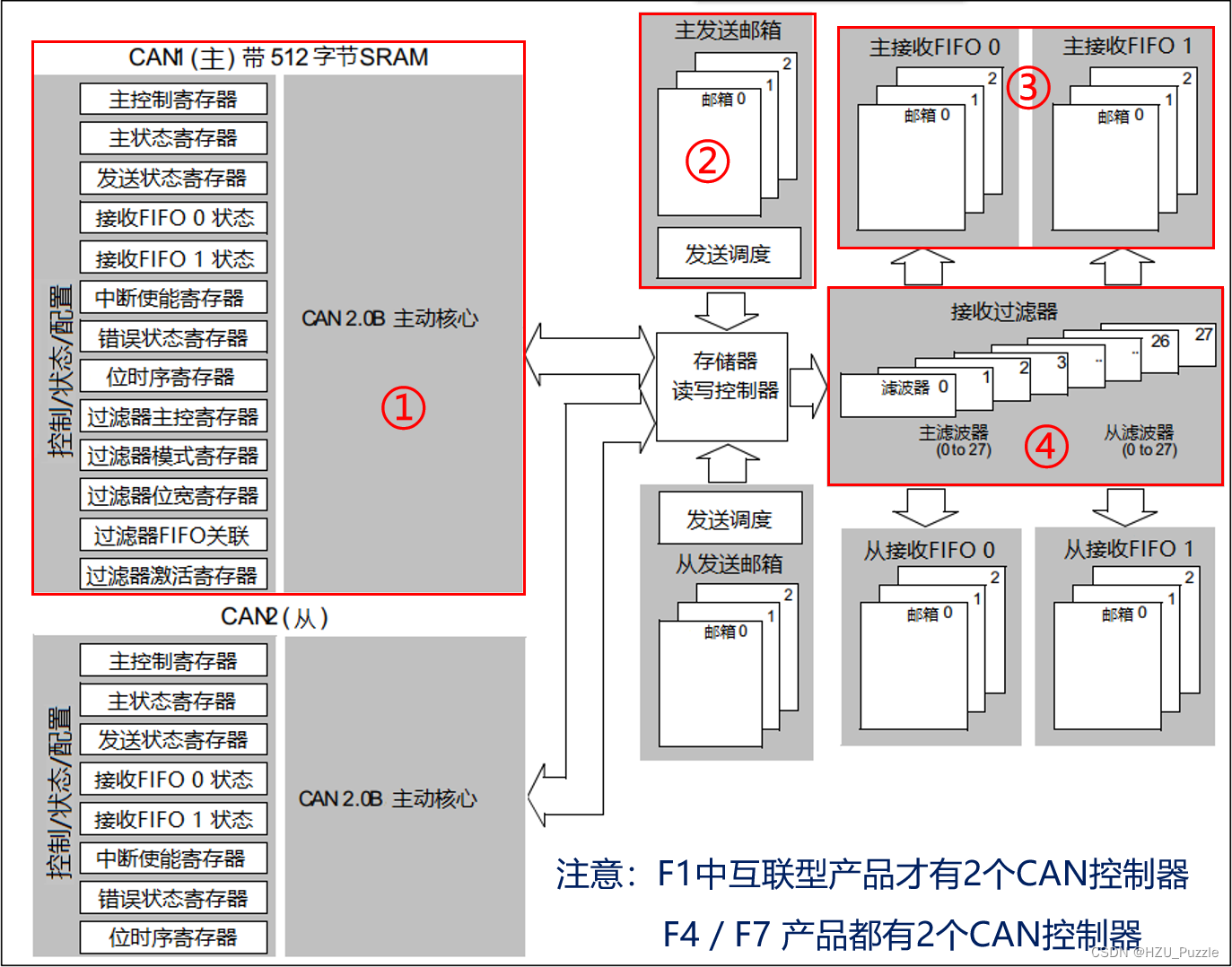
发送处理

接收处理
2.4、can控制器接收过滤器
当总线上报文数据量很大时,总线上的设备会频繁获取报文,占用 cpu。过滤器的存在,选择性接收有效报文,减轻系统负担
每个过滤器组都有两个 32 位寄存器 can_fxr1 和 can_fxr2。根据过滤器组的工作模式不同,寄存器的作用不尽相同
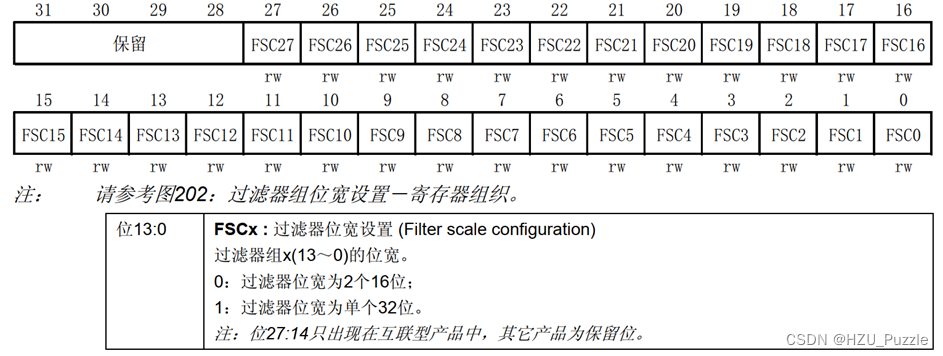
位宽可设置 32 位或 16 位,寄存器存储的内容就有所区别:

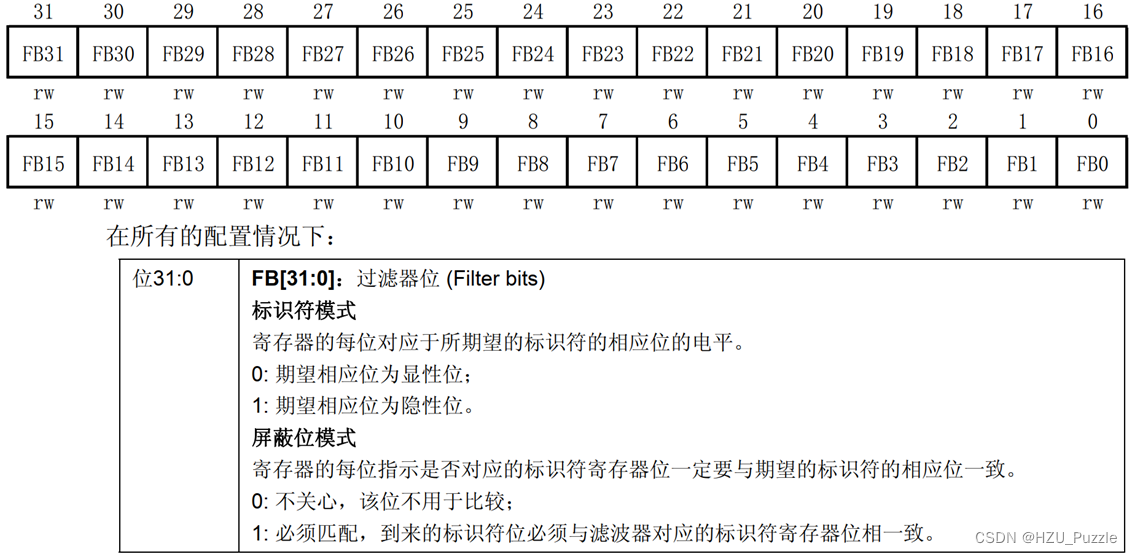
选择模式可设置屏蔽位模式或标识符列表模式,寄存器内容的功能就有所区别:
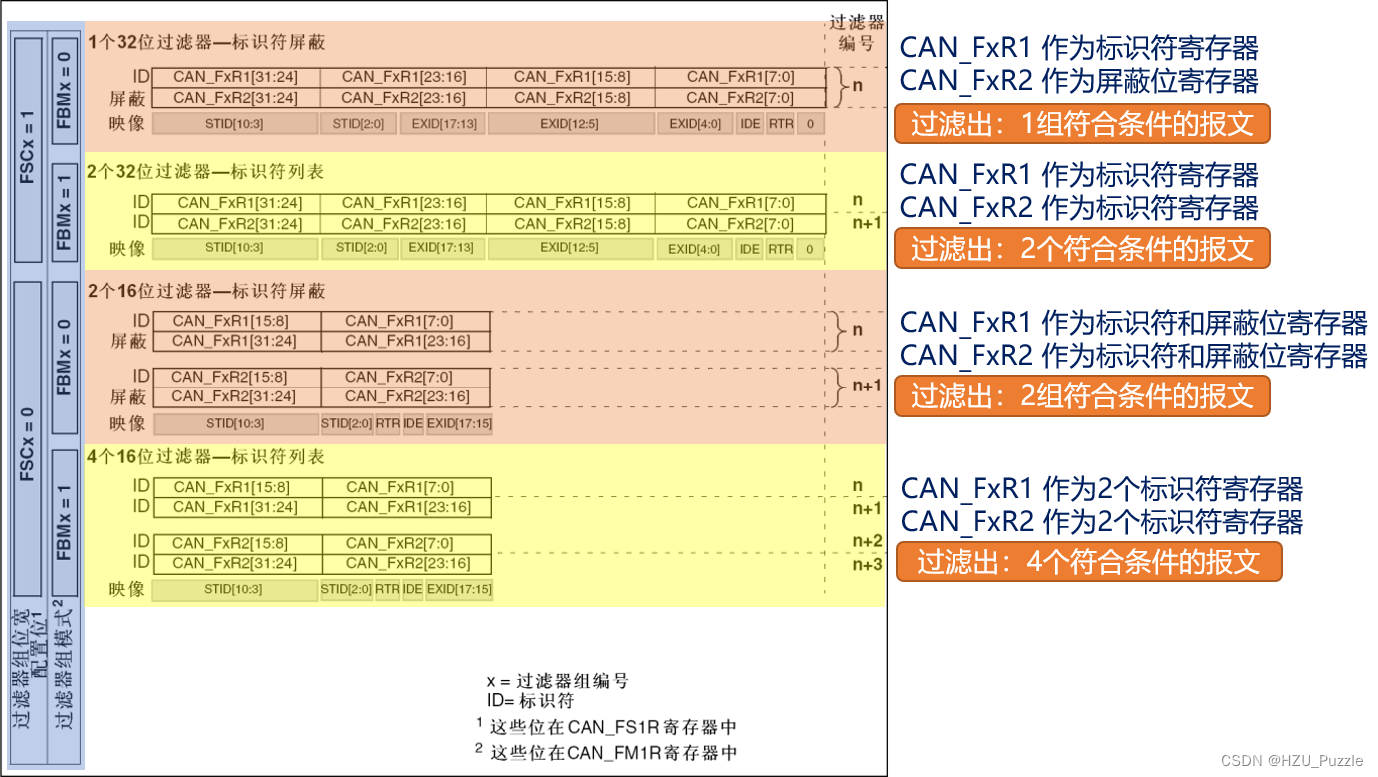
屏蔽位寄存器中位值为 1,表示与 id 要必须匹配;位值为 0,表示可不与 id 匹配
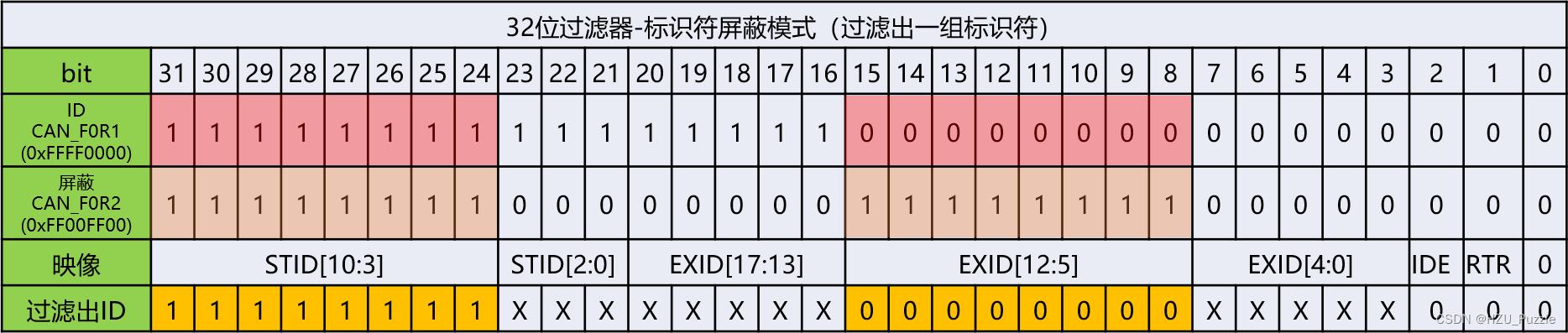
注意:标识符选择位 ide 和帧类型 rtr 需要一致。不同过滤器组的工作模式可以设置为不同
2.5、can控制器位时序
stm32的can外设位时序分为三段:
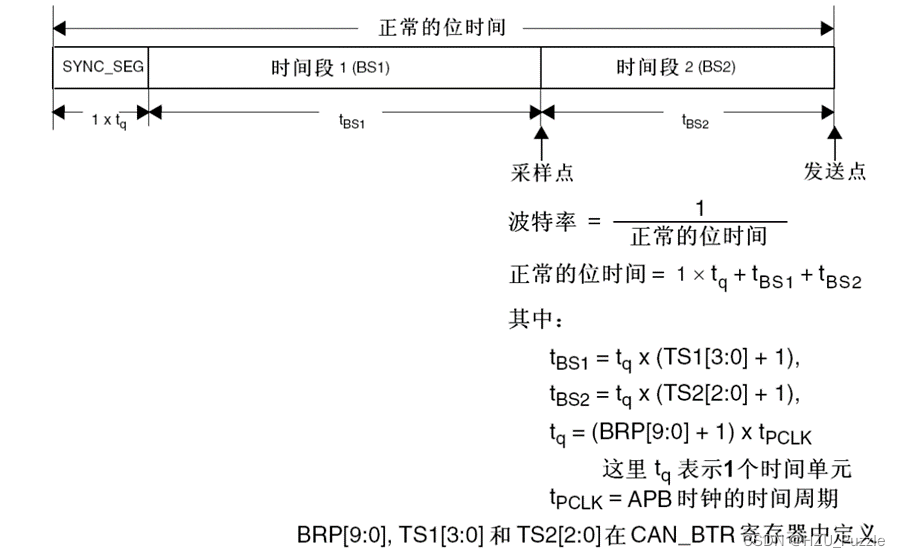

在 stm32f407,设 ts1=6、ts2=5、brp=5,波特率 = 42000 / [( 7 + 6 + 1 ) * 6] = 500kbps。
注意:通信双方波特率需要一致才能通信成功
三、can相关寄存器介绍
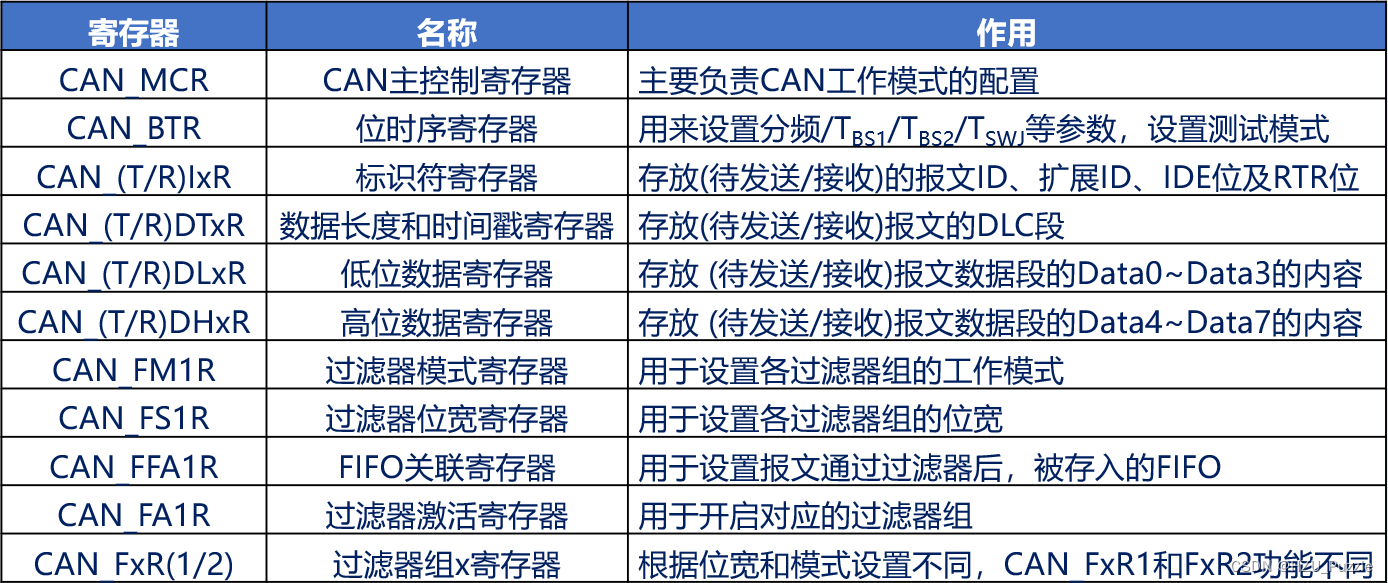
3.1、can主控制寄存器(can_mcr)


3.2、can位时序寄存器(can_btr)
3.3、can标识符寄存器(can_(t/r)ixr)
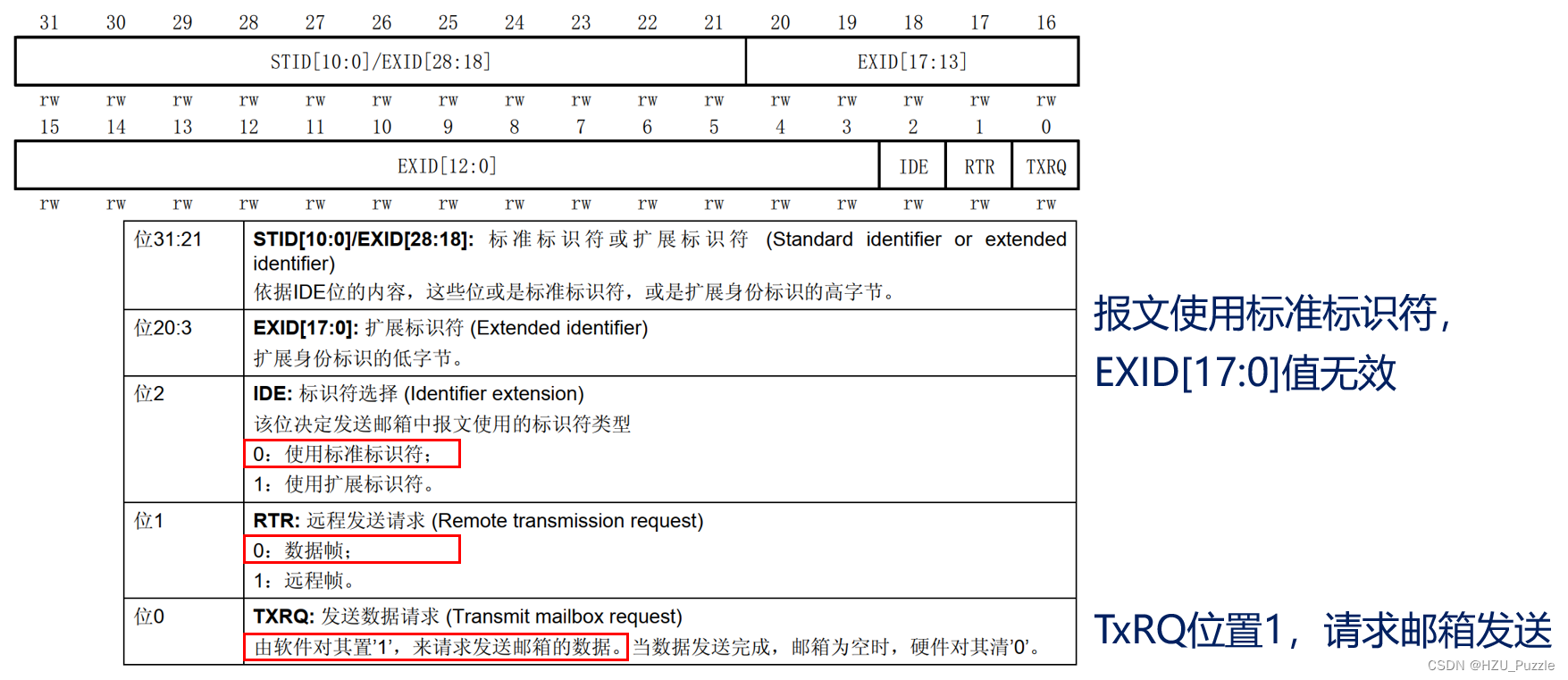
注意:报文使用扩展标识符时,stid[10:0] 等效于 exid[28:18],与 exid[17:0] 组成 29 位扩展标识符
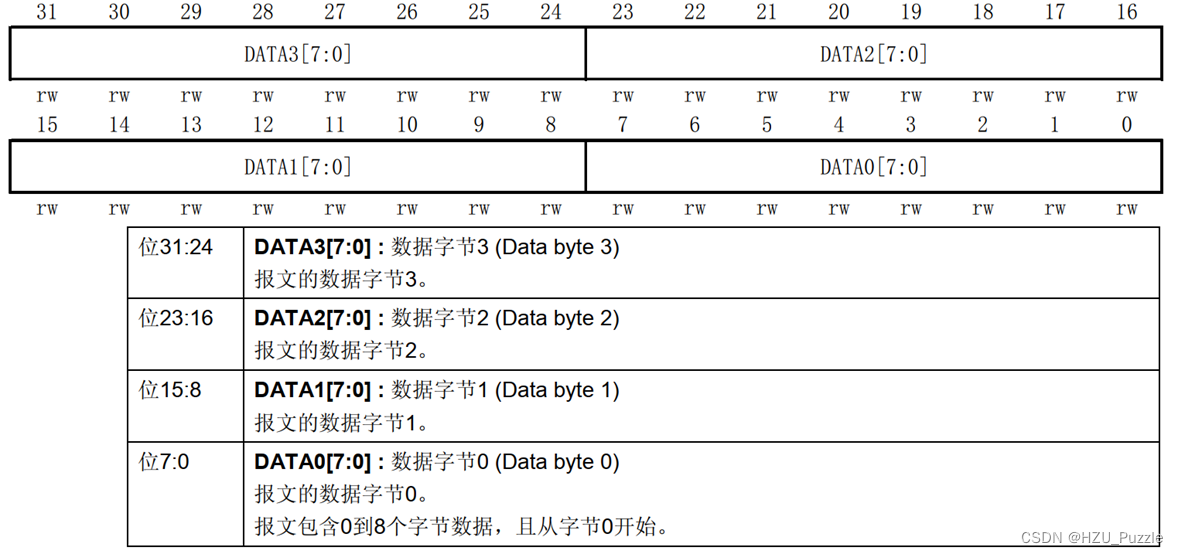
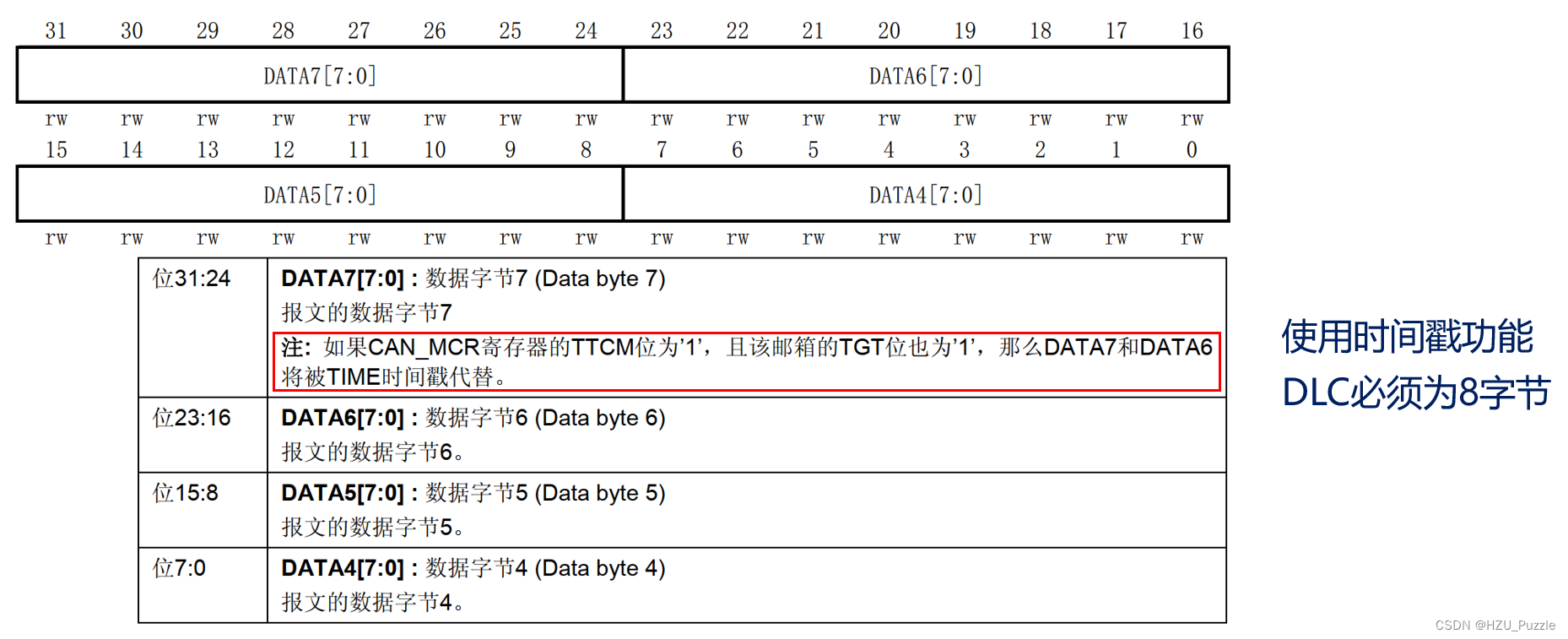
3.4、数据长度和时间戳寄存器(can_(t/r)dtxr)


注意:dlc 是多少,数据内容就有多少字节被发送,并不是每次都发送 8 个字节数据
3.5、can低位数据寄存器(can_(t/r)dlxr)
3.6、can高位数据寄存器(can_(t/r)dhxr)
3.7、can过滤器模式寄存器(can_fm1r)
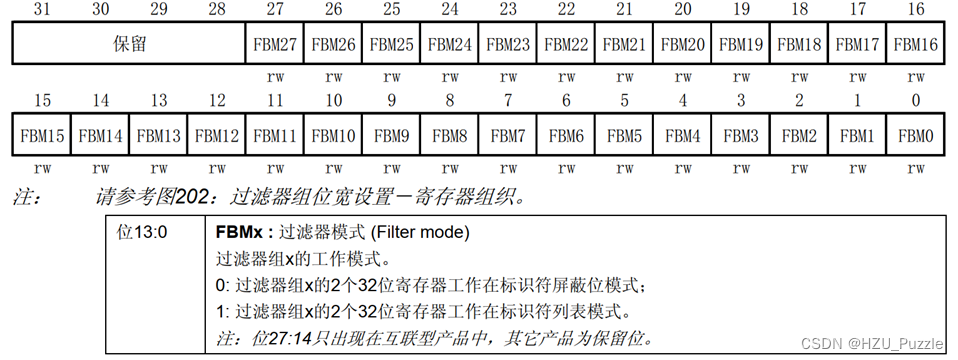
注意:can 外设只能使用的有的过滤器组,不能使用没有的过滤器组
3.8、can过滤器位宽寄存器(can_fs1r)
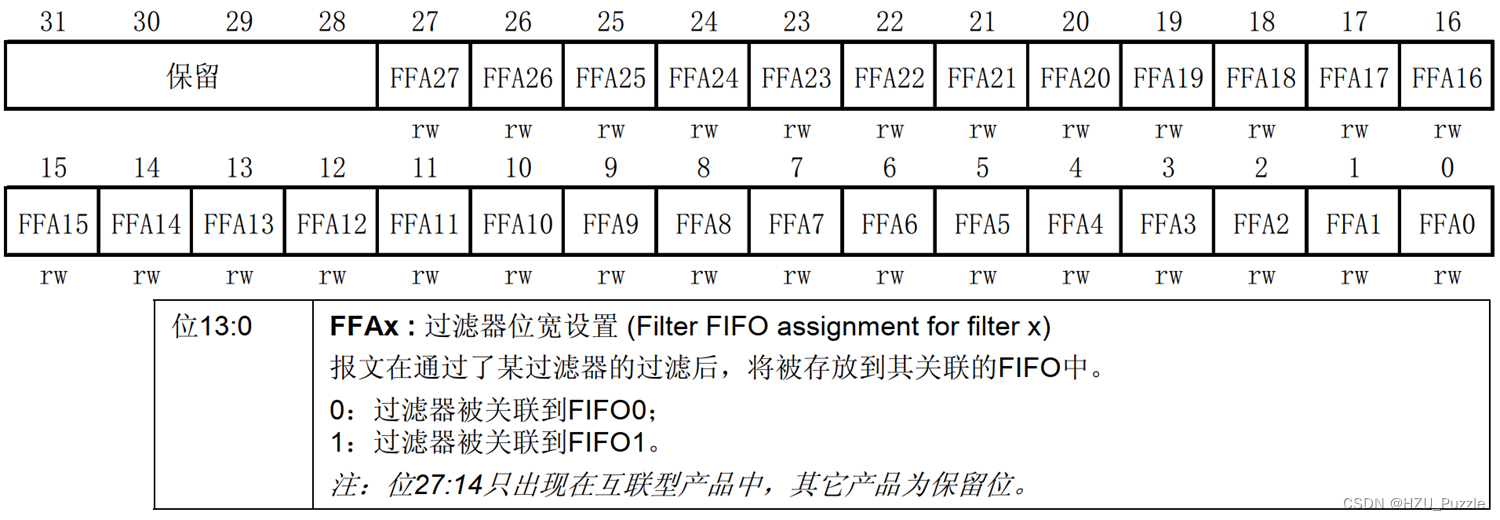
3.9、can过滤器fifo关联寄存器(can_ffa1r)
3.10、can过滤器激活寄存器(can_fa1r)


3.11、can过滤器组x寄存器(can_fxr(1/2))
四、can相关hal库驱动介绍

相关 hal 库函数介绍
can 外设相关重要结构体
can_inittypedef
typedef struct
{
uint32_t prescaler /* 预分频 */
uint32_t mode /* 工作模式 */
uint32_t syncjumpwidth /* 再次同步跳跃宽度 */
uint32_t timeseg1 /* 时间段1(bs1)长度 */
uint32_t timeseg2 /* 时间段1(bs1)长度 */
uint32_t timetriggeredmode /* 时间触发通信模式 */
uint32_t autobusoff /* 总线自动关闭 */
uint32_t autowakeup /* 自动唤醒 */
uint32_t autoretransmission /* 自动重传 */
uint32_t receivefifolocked /* 接收fifo锁定 */
uint32_t transmitfifopriority /* 传输fifo优先级 */
}can_inittypedef;can_filtertypedef
typedef struct
{
uint32_t filteridhigh /* id高字节 */
uint32_t filteridlow /* id低字节 */
uint32_t filtermaskidhigh /* 掩码高字节 */
uint32_t filtermaskidlow /* 掩码低字节 */
uint32_t filterfifoassignment /* 过滤器关联fifo */
uint32_t filterbank /* 选择过滤器组 */
uint32_t filtermode /* 过滤器模式*/
uint32_t filterscale /* 过滤器位宽 */
uint32_t filteractivation /* 过滤器使能 */
uint32_t slavestartfilterbank /* 从can选择启动过滤器组 单can没有意义*/
}can_filtertypedef;
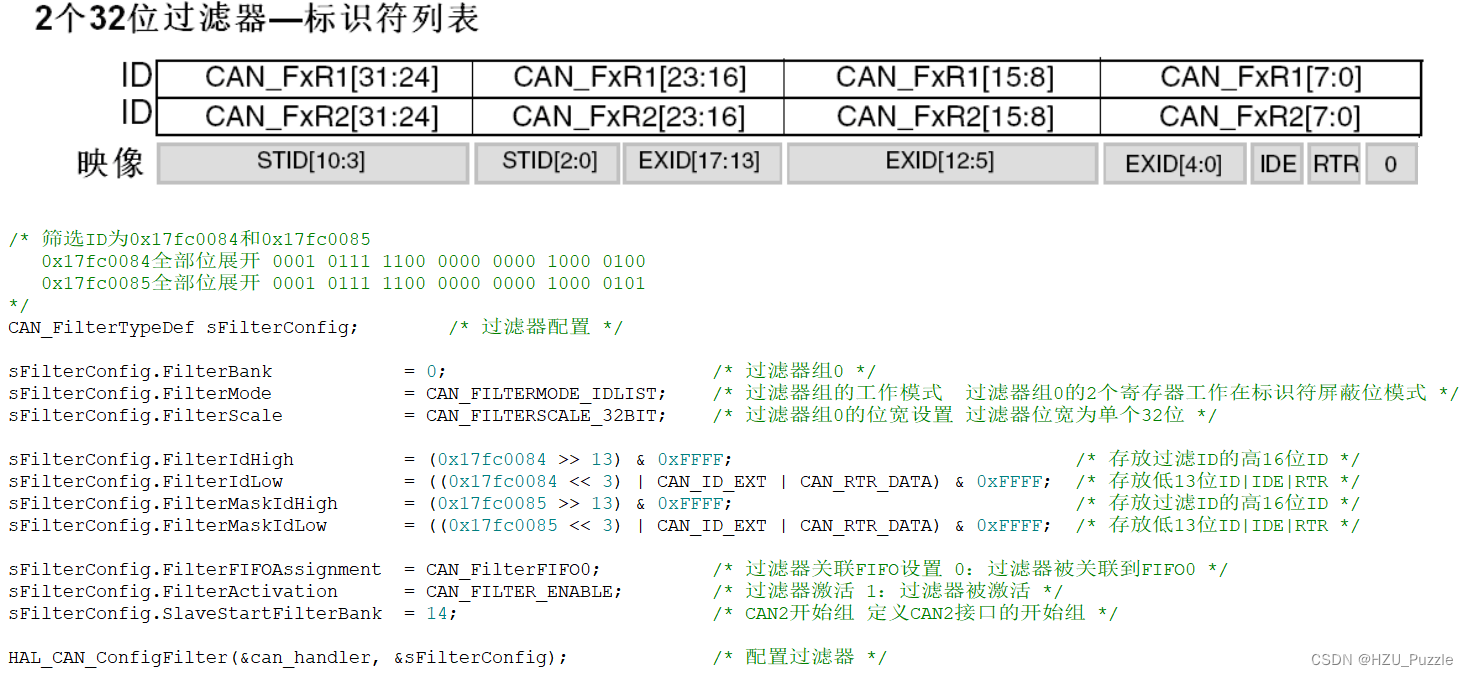
需要结合映射去赋值
can_txheadertypedef
typedef struct
{
uint32_t stdid /* 标准标识符 */
uint32_t extid /* 扩展标识符 */
uint32_t ide /* 帧格式(标准帧或扩展帧) */
uint32_t rtr /* 帧类型(数据帧或远程帧) */
uint32_t dlc /* 数据长度 */
uint32_t transmitglobaltime /* 发送时间标记(时间戳) */
}can_txheadertypedef;can_rxheadertypedef
typedef struct
{
uint32_t stdid
uint32_t extid
uint32_t ide
uint32_t rtr
uint32_t dlc
uint32_t timestamp /* 时间戳 */
uint32_t filtermatchindex /* 过滤器号 */
}can_rxheadertypedef;五、can基本驱动步骤
1、can 参数初始化:使用 hal_can_init(),配置工作模式、波特率等
2、使能 can 时钟和初始化相关引脚:使用 hal_can_mspinit(),gpio 设为复用功能模式
3、设置过滤器:使用 hal_can_configfilter(),完成过滤器的初始化
4、can 数据接收和发送:使用 hal_can_addtxmessage() 发送消息,使用 hal_can_getrxmessage() 接收消息
5、使能 can 相关中断/设置nvic/编写中断服务函数:使用 __hal_can_enable_it()
六、编程实战
使用回环模式实现自发自收
main.c
#include "./system/sys/sys.h"
#include "./system/usart/usart.h"
#include "./system/delay/delay.h"
#include "./bsp/led/led.h"
#include "./bsp/key/key.h"
#include "./bsp/lcd/lcd.h"
#include "./bsp/can/can.h"
int main(void)
{
uint8_t key;
uint8_t i = 0, t = 0;
uint8_t cnt = 0;
uint8_t canbuf[8];
uint8_t rxlen = 0;
uint8_t res;
uint8_t mode = 1; /* can工作模式: 0,普通模式; 1,环回模式 */
hal_init(); /* 初始化hal库 */
sys_stm32_clock_init(336, 8, 2, 7); /* 设置时钟,168mhz */
delay_init(168); /* 延时初始化 */
usart_init(115200); /* 串口初始化为115200 */
led_init(); /* 初始化led */
key_init(); /* 初始化按键 */
lcd_init(); /* 初始化lcd */
can_init(can_sjw_1tq, can_bs2_6tq, can_bs1_7tq, 6, can_mode_loopback); /* can初始化, 环回模式, 波特率500kbps */
lcd_show_string(30, 50, 200, 16, 16, "stm32", red);
lcd_show_string(30, 70, 200, 16, 16, "can test", red);
lcd_show_string(30, 90, 200, 16, 16, "atom@alientek", red);
lcd_show_string(30, 110, 200, 16, 16, "loopback mode", red);
lcd_show_string(30, 130, 200, 16, 16, "key0:send kek_up:mode", red); /* 显示提示信息 */
lcd_show_string(30, 150, 200, 16, 16, "count:", red); /* 显示当前计数值 */
lcd_show_string(30, 170, 200, 16, 16, "send data:", red); /* 提示发送的数据 */
lcd_show_string(30, 230, 200, 16, 16, "receive data:", red); /* 提示接收到的数据 */
while (1)
{
key = key_scan(0);
if (key == key0_pres) /* key0按下,发送一次数据 */
{
for (i = 0; i < 8; i++)
{
canbuf[i] = cnt + i; /* 填充发送缓冲区 */
if (i < 4)
{
lcd_show_xnum(30 + i * 32, 190, canbuf[i], 3, 16, 0x80, blue); /* 显示数据 */
}
else
{
lcd_show_xnum(30 + (i - 4) * 32, 210, canbuf[i], 3, 16, 0x80, blue); /* 显示数据 */
}
}
res = can_send_msg(0x12, canbuf, 8); /* id = 0x12, 发送8个字节 */
if (res)
{
lcd_show_string(30 + 80, 170, 200, 16, 16, "failed", blue); /* 提示发送失败 */
}
else
{
lcd_show_string(30 + 80, 170, 200, 16, 16, "ok ", blue); /* 提示发送成功 */
}
}
else if (key == wkup_pres) /* wk_up按下, 改变can的工作模式 */
{
mode = !mode;
/* can初始化, 普通(0)/回环(1)模式, 波特率500kbps */
can_init(can_sjw_1tq, can_bs2_6tq, can_bs1_7tq, 6, mode ? can_mode_loopback : can_mode_normal);
if (mode == 0) /* 普通模式, 需要2个开发板 */
{
lcd_show_string(30, 110, 200, 16, 16, "normal mode ", red);
}
else /* 回环模式,一个开发板就可以测试了. */
{
lcd_show_string(30, 110, 200, 16, 16, "loopback mode", red);
}
}
rxlen = can_receive_msg(0x12, canbuf); /* can id = 0x12, 接收数据查询 */
if (rxlen) /* 接收到有数据 */
{
lcd_fill(30, 270, 130, 310, white); /* 清除之前的显示 */
for (i = 0; i < rxlen; i++)
{
if (i < 4)
{
lcd_show_xnum(30 + i * 32, 250, canbuf[i], 3, 16, 0x80, blue); /* 显示数据 */
}
else
{
lcd_show_xnum(30 + (i - 4) * 32, 270, canbuf[i], 3, 16, 0x80, blue); /* 显示数据 */
}
}
}
t++;
delay_ms(10);
if (t == 20)
{
led0_toggle(); /* 提示系统正在运行 */
t = 0;
cnt++;
lcd_show_xnum(30 + 48, 150, cnt, 3, 16, 0x80, blue); /* 显示数据 */
}
}
}
can.c
#include "./bsp/can/can.h"
can_handletypedef g_canx_handler; /* canx句柄 */
can_txheadertypedef g_canx_txheader; /* 发送参数句柄 */
can_rxheadertypedef g_canx_rxheader; /* 接收参数句柄 */
/**
* @brief can初始化
* @param tsjw : 重新同步跳跃时间单元.范围: 1~3;
* @param tbs2 : 时间段2的时间单元.范围: 1~8;
* @param tbs1 : 时间段1的时间单元.范围: 1~16;
* @param brp : 波特率分频器.范围: 1~1024;
* @note 以上4个参数, 在函数内部会减1, 所以, 任何一个参数都不能等于0
* can挂在apb1上面, 其输入时钟频率为 fpclk1 = pclk1 = 42mhz
* tq = brp * tpclk1;
* 波特率 = fpclk1 / ((tbs1 + tbs2 + 1) * brp);
* 我们设置 can_init(1, 6, 7, 6, 1), 则can波特率为:
* 42m / ((6 + 7 + 1) * 6) = 500kbps
*
* @param mode : can_mode_normal, 普通模式;
can_mode_loopback,回环模式;
* @retval 0, 初始化成功; 其他, 初始化失败;
*/
uint8_t can_init(uint32_t tsjw, uint32_t tbs2, uint32_t tbs1, uint16_t brp, uint32_t mode)
{
g_canx_handler.instance = can1;
g_canx_handler.init.prescaler = brp; /* 分频系数(fdiv)为brp+1 */
g_canx_handler.init.mode = mode; /* 模式设置 */
g_canx_handler.init.syncjumpwidth = tsjw; /* 重新同步跳跃宽度(tsjw)为tsjw+1个时间单位 can_sjw_1tq~can_sjw_4tq */
g_canx_handler.init.timeseg1 = tbs1; /* tbs1范围can_bs1_1tq~can_bs1_16tq */
g_canx_handler.init.timeseg2 = tbs2; /* tbs2范围can_bs2_1tq~can_bs2_8tq */
g_canx_handler.init.timetriggeredmode = disable; /* 非时间触发通信模式 */
g_canx_handler.init.autobusoff = disable; /* 软件自动离线管理 */
g_canx_handler.init.autowakeup = disable; /* 睡眠模式通过软件唤醒(清除can->mcr的sleep位) */
g_canx_handler.init.autoretransmission = enable; /* 禁止报文自动传送 */
g_canx_handler.init.receivefifolocked = disable; /* 报文不锁定,新的覆盖旧的 */
g_canx_handler.init.transmitfifopriority = disable; /* 优先级由报文标识符决定 */
if (hal_can_init(&g_canx_handler) != hal_ok)
{
return 1;
}
#if can_rx0_int_enable
/* 使用中断接收 */
__hal_can_enable_it(&g_canx_handler, can_it_rx_fifo0_msg_pending); /* fifo0消息挂号中断允许 */
hal_nvic_enableirq(can1_rx0_irqn); /* 使能can中断 */
hal_nvic_setpriority(can1_rx0_irqn, 1, 0); /* 抢占优先级1,子优先级0 */
#endif
can_filtertypedef sfilterconfig;
/* 配置can过滤器 */
sfilterconfig.filterbank = 0; /* 过滤器0 */
sfilterconfig.filtermode = can_filtermode_idmask;
sfilterconfig.filterscale = can_filterscale_32bit;
sfilterconfig.filteridhigh = 0x0000; /* 32位id */
sfilterconfig.filteridlow = 0x0000;
sfilterconfig.filtermaskidhigh = 0x0000; /* 32位mask */
sfilterconfig.filtermaskidlow = 0x0000;
sfilterconfig.filterfifoassignment = can_filter_fifo0; /* 过滤器0关联到fifo0 */
sfilterconfig.filteractivation = can_filter_enable; /* 激活滤波器0 */
sfilterconfig.slavestartfilterbank = 14;
/* 过滤器配置 */
if (hal_can_configfilter(&g_canx_handler, &sfilterconfig) != hal_ok)
{
return 2;
}
/* 启动can外围设备 */
if (hal_can_start(&g_canx_handler) != hal_ok)
{
return 3;
}
return 0;
}
/**
* @brief can底层驱动,引脚配置,时钟配置,中断配置
此函数会被hal_can_init()调用
* @param hcan:can句柄
* @retval 无
*/
void hal_can_mspinit(can_handletypedef *hcan)
{
if (can1 == hcan->instance)
{
can_rx_gpio_clk_enable(); /* can_rx脚时钟使能 */
can_tx_gpio_clk_enable(); /* can_tx脚时钟使能 */
__hal_rcc_can1_clk_enable(); /* 使能can1时钟 */
gpio_inittypedef gpio_init_struct;
gpio_init_struct.pin = can_tx_gpio_pin;
gpio_init_struct.mode = gpio_mode_af_pp;
gpio_init_struct.pull = gpio_pullup;
gpio_init_struct.speed = gpio_speed_freq_high;
gpio_init_struct.alternate = gpio_af9_can1;
hal_gpio_init(can_tx_gpio_port, &gpio_init_struct); /* can_tx脚 模式设置 */
gpio_init_struct.pin = can_rx_gpio_pin;
hal_gpio_init(can_rx_gpio_port, &gpio_init_struct); /* can_rx脚 必须设置成输入模式 */
}
}
#if can_rx0_int_enable /* 使能rx0中断 */
/**
* @brief can rx0 中断服务函数
* @note 处理can fifo0的接收中断
* @param 无
* @retval 无
*/
void usb_lp_can1_rx0_irqhandler(void)
{
uint8_t rxbuf[8];
uint32_t id;
can_receive_msg(id, rxbuf);
printf("id:%d\r\n", g_canx_rxheader.stdid);
printf("ide:%d\r\n", g_canx_rxheader.ide);
printf("rtr:%d\r\n", g_canx_rxheader.rtr);
printf("len:%d\r\n", g_canx_rxheader.dlc);
printf("rxbuf[0]:%d\r\n", rxbuf[0]);
printf("rxbuf[1]:%d\r\n", rxbuf[1]);
printf("rxbuf[2]:%d\r\n", rxbuf[2]);
printf("rxbuf[3]:%d\r\n", rxbuf[3]);
printf("rxbuf[4]:%d\r\n", rxbuf[4]);
printf("rxbuf[5]:%d\r\n", rxbuf[5]);
printf("rxbuf[6]:%d\r\n", rxbuf[6]);
printf("rxbuf[7]:%d\r\n", rxbuf[7]);
}
#endif
/**
* @brief can 发送一组数据
* @note 发送格式固定为: 标准id, 数据帧
* @param id : 标准id(11位)
* @param msg : 数据指针
* @param len : 数据长度
* @retval 发送状态 0, 成功; 1, 失败;
*/
uint8_t can_send_msg(uint32_t id, uint8_t *msg, uint8_t len)
{
uint16_t t = 0;
uint32_t txmailbox = can_tx_mailbox0;
g_canx_txheader.stdid = id; /* 标准标识符 */
g_canx_txheader.extid = id; /* 扩展标识符(29位) */
g_canx_txheader.ide = can_id_std; /* 使用标准帧 */
g_canx_txheader.rtr = can_rtr_data; /* 数据帧 */
g_canx_txheader.dlc = len;
if (hal_can_addtxmessage(&g_canx_handler, &g_canx_txheader, msg, &txmailbox) != hal_ok) /* 发送消息 */
{
return 1;
}
while (hal_can_gettxmailboxesfreelevel(&g_canx_handler) != 3) /* 等待发送完成,所有邮箱为空 */
{
t++;
if (t > 0xfff)
{
hal_can_aborttxrequest(&g_canx_handler, txmailbox); /* 超时,直接中止邮箱的发送请求 */
return 1;
}
}
return 0;
}
/**
* @brief can 接收数据查询
* @note 接收数据格式固定为: 标准id, 数据帧
* @param id : 要查询的 标准id(11位)
* @param buf : 数据缓存区
* @retval 接收结果
* @arg 0 , 无数据被接收到;
* @arg 其他, 接收的数据长度
*/
uint8_t can_receive_msg(uint32_t id, uint8_t *buf)
{
if (hal_can_getrxfifofilllevel(&g_canx_handler, can_rx_fifo0) == 0) /* 没有接收到数据 */
{
return 0;
}
if (hal_can_getrxmessage(&g_canx_handler, can_rx_fifo0, &g_canx_rxheader, buf) != hal_ok) /* 读取数据 */
{
return 0;
}
if (g_canx_rxheader.stdid != id || g_canx_rxheader.ide != can_id_std || g_canx_rxheader.rtr != can_rtr_data) /* 接收到的id不对 / 不是标准帧 / 不是数据帧 */
{
return 0;
}
return g_canx_rxheader.dlc;
}
can.h
#ifndef __can_h
#define __can_h
#include "./system/sys/sys.h"
#include "./bsp/led/led.h"
#include "./system/delay/delay.h"
#include "./system/usart/usart.h"
/******************************************************************************************/
/* can 引脚 定义 */
#define can_rx_gpio_port gpioa
#define can_rx_gpio_pin gpio_pin_11
#define can_rx_gpio_clk_enable() do{ __hal_rcc_gpioa_clk_enable(); }while(0) /* pa口时钟使能 */
#define can_tx_gpio_port gpioa
#define can_tx_gpio_pin gpio_pin_12
#define can_tx_gpio_clk_enable() do{ __hal_rcc_gpioa_clk_enable(); }while(0) /* pa口时钟使能 */
/******************************************************************************************/
/* can接收rx0中断使能 */
#define can_rx0_int_enable can1_rx0_irqhandler
/* 函数声明 */
uint8_t can_receive_msg(uint32_t id, uint8_t *buf); /* can接收数据, 查询 */
uint8_t can_send_msg(uint32_t id, uint8_t *msg, uint8_t len); /* can发送数据 */
uint8_t can_init(uint32_t tsjw,uint32_t tbs2,uint32_t tbs1,uint16_t brp,uint32_t mode); /* can初始化 */
#endif


发表评论