文章目录
前言
在数字化时代的浪潮中,目标检测技术以其独特的魅力和无可比拟的实用价值,成为计算机视觉领域的璀璨明珠。目标检测技术旨在模仿人类视觉系统的功能,通过算法和模型识别和定位图像或视频中的具体物体。从早期的简单算法到现今的深度学习方法,这一领域经历了飞速的发展,其应用范围也从简单的图像分类扩展到了复杂的三维空间识别。本文旨在为读者提供一个目标检测领域的概览,包括其基本概念、主流技术、应用领域,以及这个领域的发展历程和未来趋势。我们会深入探讨目标检测的核心—从传统的两阶段检测到一阶段检测,再到新兴的检测技术—并讨论如何通过各种评价指标来衡量目标检测模型的性能。最后,我们将展望目标检测的未来发展方向,这些方向不仅令人激动,同时也充满了挑战。
一、目标检测的概述
1.1 目标检测概念
目标检测(object detection)是计算机视觉领域中的一项核心技术,它旨在让计算机能够像人眼一样识别和定位图像中的物体。具体来说,它不仅需要识别出图像中有哪些对象,还要确定它们在图像中的位置(通常以边界框的形式表示)以及它们的类别。
目标检测的本质是对视觉信息进行解析,使计算机能够理解图像中的内容。这涉及到图像处理、特征提取、模式识别和机器学习等多个层面。在技术层面,目标检测要解决的问题包括但不限于:对象分类、位置估计、尺寸变化、遮挡处理、背景干扰以及实时处理能力等。
1.2 主流解决方式
目前,基于深度学习的方法是目标检测领域的主流解决方式,它通常分为两类:
-
两阶段检测方法:这种方法先从图像中提取出潜在的对象候选区域,然后对这些区域进行详细的分类和边界框精调。代表模型包括r-cnn系列(如fast r-cnn, faster r-cnn)和基于区域的全卷积网络(如mask r-cnn)。
-
单阶段检测方法:这种方法直接在图像上预测对象的类别和位置,速度通常更快,但在准确度上可能略逊于两阶段方法。代表模型包括yolo(you only look once)、ssd(single shot multibox detector)和retinanet等。
近年来,transformer架构也被引入到目标检测中,如detr(detection transformer)模型,这标志着目标检测技术的一个新的发展方向。
1.3 应用领域
目标检测的应用极其广泛,涵盖了安防监控、自动驾驶、工业自动化、医疗图像分析、零售分析以及智能视频分析等多个领域。例如,在零售行业中,目标检测可以用来跟踪顾客的行为、管理库存。在医疗领域,它可以帮助识别疾病标记,如x光片中的肿瘤。在自动驾驶技术中,它是车辆理解周围环境的关键技术,用于识别路标、行人和其他车辆等。
二、目标检测的发展
在过去的二十年里,目标检测技术经历了两个重要的历史阶段:传统目标检测时期(2014年之前)和基于深度学习的检测时期(2014年之后)。
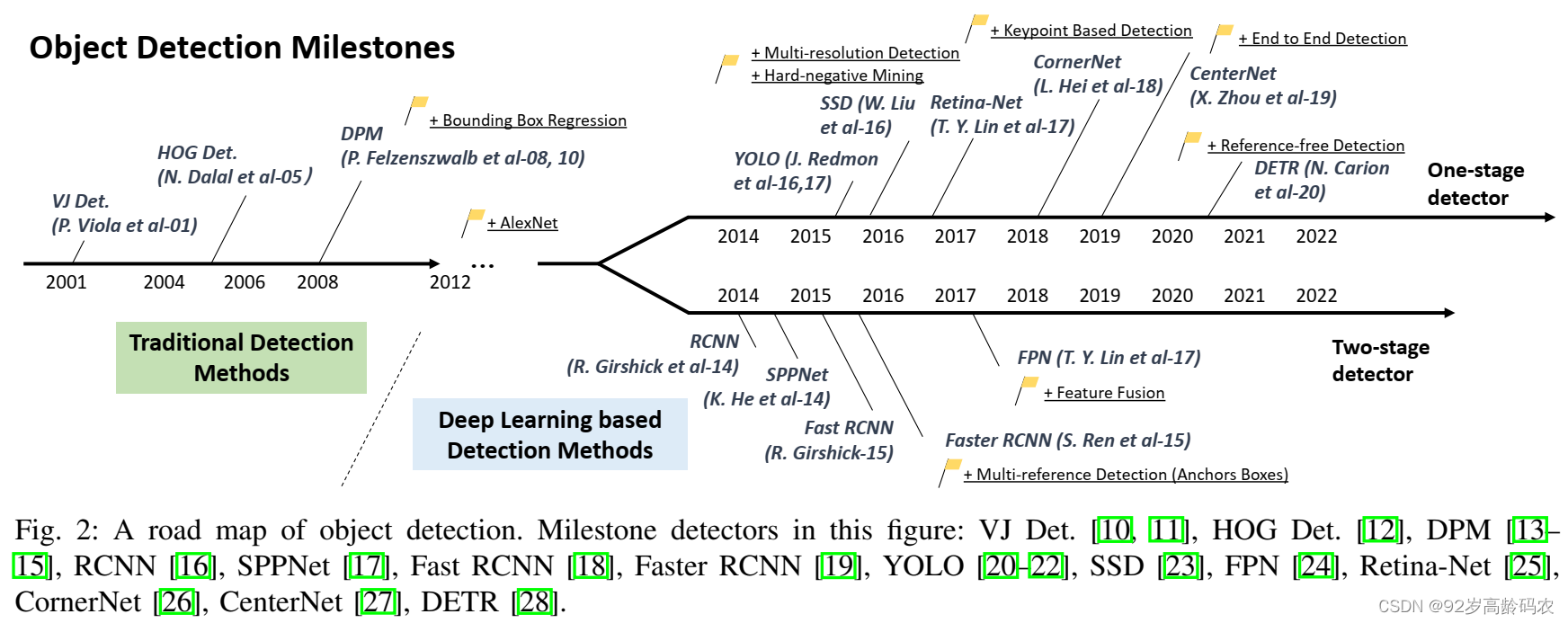
在当前的计算机视觉领域,基于深度学习的目标检测技术主要分为两大类:单阶段目标检测(one-stage detectors)和两阶段目标检测(two-stage detectors)。这两类方法在设计理念、检测流程和应用场景上有所不同。
2.1 两阶段目标检测
两阶段目标检测器首先生成一系列候选的对象区域,然后对这些区域进行分类和边界框回归以确定最终的检测结果。这个过程通常分为两个主要阶段:
-
区域提议(region proposal):这单阶段生成可能包含目标的区域。例如,faster rcnn使用区域提议网络(rpn)来高效生成提议。
-
精确检测(refinement):提议的区域随后被送入网络进行进一步的分类和边界框的精调。fast rcnn在此阶段应用了一种共享特征的方法来提高效率。
这种方法的代表模型包括:
2.2 单阶段目标检测
单阶段目标检测方法的目标是简化检测流程,它们将目标的分类和边界框回归合并到一个步骤中完成。它们通常更快,但可能在精确度上略低于两阶段方法。
这种方法的代表模型包括:
2.3 新时代的检测技术
三、目标检测的指标
3.1 基础概念
在评估目标检测模型的性能时,我们通常会遇到以下四个基本概念,它们是构成更复杂指标的基础:
-
正确的正向预测(true positive,tp):
正确的正向预测是指模型正确地识别出正样本(即感兴趣的对象)。- 在行人检测任务中,模型预测某个区域有行人,如果该区域确实存在行人,这就是一个tp。
- 在医疗图像分析中,如果模型预测一个图像包含恶性肿瘤,并且实际上图像确实包含恶性肿瘤,那么这就是一个tp。
- 在邮件分类中,模型将一封实际为垃圾邮件的邮件正确地分类为垃圾邮件,这也是一个tp。
- 在交通监控系统中,如果模型预测到一辆车正在违章停车,并且车辆确实违章停车了,这同样是一个tp。
-
错误的正向预测(false positive,fp):
错误的正向预测发生在模型错误地标记出了不存在的正样本。- 以行人检测为例,如果模型预测某个区域有行人,但实际上那里没有行人,这就是一个fp。
- 在面部识别入侵检测系统中,系统错误地将一张动物的照片识别为人脸,这就是fp。
- 在商品检测中,如果模型错误地将背景中的图案识别为一个商品,这也是fp。
- 在天气预测中,如果模型预报将会下雨,而实际上天气晴朗,这也可以视为一个fp的情况。
-
错误的负向预测(false negative,fn):
错误的负向预测是指模型未能检测到实际存在的正样本。- 在行人检测任务中,如果模型未能预测到某个区域实际存在的行人,这就构成了fn。
- 在安全监测系统中,如果模型没有检测到实际存在的未经授权的入侵者,这是fn。
- 在股票市场分析中,如果模型未能预测到即将发生的价格上涨,即使实际上股票价格确实上涨了,这也是fn。
- 在农业病虫害检测中,如果模型未能识别出实际存在的病虫害,导致遗漏治疗,这是fn。
-
正确的负向预测(true negative,tn):
正确的负向预测指的是模型正确地预测某个区域没有正样本。- 在行人检测中,如果在一个区域没有行人,模型也没有检测到行人,那么这就是一个tn。
- 在网络安全中,如果系统没有对合法的网络流量发出警报,那么这些实例都是tn。
- 在文本分析中,如果模型将一封正常邮件正确地标记为非垃圾邮件,这是tn。
- 在质量控制中,如果一个检测系统正确地识别出一个产品没有缺陷,而该产品确实没有缺陷,这也是tn。
了解这些基本概念是评估和理解以下性能指标的前提,如精确率、召回率、f1分数等。它们共同构成了评价模型性能的框架,帮助我们从不同角度理解模型的优势和不足。
3.2 评价指标
1. 精确率(precision)
2. 召回率(recall)
3. 准确率(accuracy)
4. f1分数(f1 score)
5. 平均精度(average precision, ap)
6. 平均精度均值(mean average precision, map)
7. 交并比(intersection over union, iou)
以上指标为目标检测模型提供了全面的性能评估,有助于开发者理解模型在不同方面的表现,并在必要时对模型进行调整优化。
3.3 评价指标代码实现
为了实现目标检测模型的评价指标,我们可以编写一系列函数,分别计算各个指标。以下是每个指标的python代码实现:
3.3.1 精确率
def calculate_precision(tp, fp):
return tp / (tp + fp) if (tp + fp) > 0 else 0
3.3.2 召回率
def calculate_recall(tp, fn):
return tp / (tp + fn) if (tp + fn) > 0 else 0
3.3.3 准确率
def calculate_accuracy(tp, tn, fp, fn):
return (tp + tn) / (tp + tn + fp + fn) if (tp + tn + fp + fn) > 0 else 0
3.3.4 f1分数
def calculate_f1_score(precision, recall):
return 2 * (precision * recall) / (precision + recall) if (precision + recall) > 0 else 0
3.3.5 平均精度
计算ap相对复杂,因为它涉及到构建精确率-召回率曲线并计算其下面积。通常使用库函数来完成这一步,例如使用sklearn.metrics中的average_precision_score。
import matplotlib.pyplot as plt
from sklearn.metrics import precision_recall_curve
from sklearn.datasets import make_classification
from sklearn.model_selection import train_test_split
from sklearn.ensemble import randomforestclassifier
from sklearn.metrics import average_precision_score
# 生成模拟数据
x, y = make_classification(n_samples=1000, n_features=20, n_classes=2, random_state=42)
# 分割数据集
x_train, x_test, y_train, y_test = train_test_split(x, y, test_size=0.5, random_state=42)
# 使用随机森林作为分类器
classifier = randomforestclassifier(n_estimators=100, random_state=42)
classifier.fit(x_train, y_train)
# 预测概率
y_scores = classifier.predict_proba(x_test)[:, 1]
# 计算精确率和召回率
precision, recall, thresholds = precision_recall_curve(y_test, y_scores)
# 计算平均精确率
average_precision = average_precision_score(y_test, y_scores)
# 绘制精确率-召回率曲线
plt.step(recall, precision, where='post')
plt.fill_between(recall, precision, step='post', alpha=0.2, color='b')
plt.xlabel('recall')
plt.ylabel('precision')
plt.ylim([0.0, 1.05])
plt.xlim([0.0, 1.0])
plt.title(f'precision-recall curve: ap={average_precision:.2f}')
plt.show()
3.3.6 平均精度均值
map的计算通常依赖于多个类别的ap值,其实现也较为复杂,常在大型框架如tensorflow或pytorch中实现,如多类别的目标检测。map的计算涉及到对每个类别单独计算ap,然后取这些ap值的平均。
下面是一个简化的示例,展示了如何计算map。假设我们有三个类别的ap值,我们可以简单地计算它们的平均值来得到map:
# 假设的ap值,一般来自于实际的模型预测和标注数据
ap_values = [0.72, 0.85, 0.78] # 每个类别的ap值
# 计算map
mean_ap = sum(ap_values) / len(ap_values)
print(f"mean average precision (map): {mean_ap:.2f}")
在实际应用中,这些ap值将来自于模型对每个类别的预测效果的评估。每个类别的ap计算方式与单一类别的类似,但是我们需要为每个类别单独计算精确率和召回率,然后使用这些值来计算每个类别的ap。最后,计算这些ap值的平均值得到map。
3.3.7 交并比
我们简单实现一个测量模型预测的边界框与真实边界框之间的重叠程度。
def calculate_iou(box_pred, box_true):
# 计算交集的坐标
x_left = max(box_pred[0], box_true[0])
y_top = max(box_pred[1], box_true[1])
x_right = min(box_pred[2], box_true[2])
y_bottom = min(box_pred[3], box_true[3])
# 计算交集面积
intersection_area = max(0, x_right - x_left) * max(0, y_bottom - y_top)
# 计算各自框的面积
area_pred = (box_pred[2] - box_pred[0]) * (box_pred[3] - box_pred[1])
area_true = (box_true[2] - box_true[0]) * (box_true[3] - box_true[1])
# 计算并集面积
union_area = area_pred + area_true - intersection_area
# 计算iou
return intersection_area / union_area if union_area > 0 else 0
下面是对这段代码的详细解释:
这些函数为目标检测模型的评价提供了基本的工具。需要注意的是,在实际应用中,还需要将这些函数集成到模型的评估流程中,并确保正确处理数据集和模型输出的格式。
四、目标检测的发展和未来趋势
目标检测作为计算机视觉的核心领域,在过去二十年里取得了巨大的进步。从初步的图像处理到复杂的深度学习模型,这一技术领域一直在不断进化。然而,尽管取得了显著的成就,目标检测的未来仍充满挑战和机遇。以下是论文中提及的一些最有前景的未来研究方向。
1. 轻量级目标检测
随着边缘计算设备的兴起,轻量级目标检测变得至关重要。我们期望的是,检测算法能够在低功耗设备上快速运行,以支持移动增强现实、自动驾驶、智慧城市等应用。目前,检测速度与人眼的差距仍然很大,特别是在检测小型物体或使用多源信息检测时。未来的研究需要在提升速度的同时保证检测的准确性和可靠性。
2. 端到端目标检测
尽管已有方法可以以端到端的方式实现对象检测(从图像到边界框),但大多数仍采用一对多的标签分配方法,并独立设计非最大抑制操作。未来的研究可能会集中在设计既保持高检测精度又保持高效率的端到端流程。
3. 小物体检测
在大场景中检测小物体长期以来一直是一个挑战。这一研究方向的潜在应用包括人群或露天动物的人口计数,以及从卫星图像中检测军事目标。进一步的研究方向可能包括集成视觉注意力机制和设计高分辨率轻量级网络。
4. 3d目标检测
尽管在2d目标检测方面取得了近期的进展,但诸如自动驾驶之类的应用依赖于获取3d世界中物体的位置和姿态。目标检测的未来将在3d世界中获得更多关注,并利用多源和多视角数据(例如,来自多个传感器的rgb图像和3d激光雷达点)。
5. 视频中的检测
在高清视频中实时进行目标检测/跟踪对于视频监控和自动驾驶至关重要。传统的目标检测器通常是针对图像检测设计的,而忽略了视频帧之间的相关性。在计算限制下,通过探索时空关联来提高检测能力是一个重要的研究方向。
6. 跨模态检测
使用多种数据源/模态的目标检测,例如rgb-d图像、激光雷达、流、声音、文本、视频等,对于更准确的检测系统至关重要,这能实现类似人类感知的性能。一些未解决的问题包括:如何将训练有素的检测器迁移到不同模态的数据上,如何进行信息融合以提高检测性能等。
7. 朝向开放世界的检测
跨领域的泛化、零次学习检测和增量检测是目标检测中新兴的话题。大多数研究试图减少灾难性遗忘或利用补充信息。人类本能地在环境中发现未知类别的物体。当给出相应的知识(标签)时,人类将从中学习新知识,并保留模式。然而,对于当前的目标检测算法来说,掌握未知类别物体的检测能力是困难的。开放世界中的目标检测旨在在没有明确给出或部分给出监督信号时发现未知类别的物体,这在机器人和自动驾驶等应用中具有巨大的应用前景。
参考文献
总结
通过对目标检测技术的全面回顾,我们可以清晰地看到,这一领域已经从初级的图像处理技术发展成为一门高度复杂且功能强大的科学。目标检测不仅推动了计算机视觉理论的进步,而且还在安防、医疗、交通、工业以及娱乐等多个领域中找到了实际应用。当前,随着深度学习等前沿技术的不断涌现,目标检测已经进入了一个崭新的时代,它正在变得更快、更准确、更智能。
尽管取得了巨大的成就,目标检测的旅程仍远未结束。面对小物体检测、实时视频分析、跨模态识别等复杂场景,目标检测仍然面临许多挑战。未来的发展趋势预示着这一领域将更加注重算法的轻量化、效率和泛化能力。同时,随着技术的不断成熟,我们期待目标检测技术在开放世界的识别、3d空间理解以及与人类感知更为接近的智能应用上取得新的突破。


发表评论