一、图像拼接的基本流程
图像拼接主要包含以下几个步骤:
- 读取待拼接的图片
- 检测图片的特征点并计算描述符
- 匹配两张图片的特征点
- 计算透 视变换矩阵
- 应用变换并拼接图片
二、代码实现详解
1. 准备工作
首先导入必要的库并定义辅助函数:
import cv2
import numpy as np
import sys
def cv_show(name, img):
"""显示图像辅助函数"""
cv2.imshow(name, img)
cv2.waitkey(0)
2. 特征检测与描述
我们使用sift(scale-invariant feature transform)算法来检测图像的特征点并计算描述符:
def detectanddescribe(image):
"""检测图像特征点并计算描述符"""
gray = cv2.cvtcolor(image, cv2.color_bgr2gray)
descriptor = cv2.sift_create()
# 检测sift特征点,并计算描述符
(kps, des) = descriptor.detectandcompute(gray, none)
# 将关键点坐标转换为numpy数组
kps_float = np.float32([kp.pt for kp in kps])
return (kps, kps_float, des)
sift算法具有尺度不变性,能够在不同尺度下检测到稳定的特征点,非常适合用于图像拼接。
detectanddescribe 函数详解
这个函数是图像拼接或特征匹配任务中的关键步骤,主要用于从输入图像中检测关键点 (sift特征点) 并计算它们的描述符。下面我将详细解释每一部分的含义和作用:
(1)函数功能
该函数接收一张彩色 图像,然后:
- 将图像转换为灰度图
- 使用sift算法检测图像中的关键点(特征点)
- 为每个关键点计算描述符(一种数学表示)
- 将关键点坐标转换为numpy数组格式
- 返回关键点对象、关键点坐标和描述符
(2)代码解析
gray = cv2.cvtcolor(image, cv2.color_bgr2gray)
- 将输入的bgr格式彩色 图像转换为灰度图像
- 大多数特征检测算法都在灰度图像上工作,因为颜色信息对特征检测通常不是必需的
descriptor = cv2.sift_create()
- 创建一个sift(scale-invariant feature transform,尺度不变特征变换)检测器对象
- sift是一种经典的特征检测算法,对图像缩放、旋转、亮度变化等具有不变性
(kps, des) = descriptor.detectandcompute(gray, none)
- 同时检测关键点并计算描述符
- detectandcompute() 是opencv中高效的方法,一步完成检测和计算
- 参数:
- gray: 输入的灰度图像
- none: 可选的掩膜参数,这里不使用
- 返回值:
- kps: 检测到的关键点列表,每个关键点是一个包含多种属性(坐标、尺度、方向等)的对象
- des: 关键点描述符的numpy数组,每个描述符是一个128维的向量
kps_float = np.float32([kp.pt for kp in kps])
- 将关键点的坐标提取出来并转换为numpy数组
- kp.pt: 每个关键点的(x, y)坐标属性
- np.float32: 转换为32位浮点数格式,这是许多opencv函数要求的输入格式
return (kps, kps_float, des)
- 返回三个值:
kps: 原始的关键点对象列表(包含完整信息)
kps_float: 仅包含关键点坐标的numpy数组
des: 关键点描述符数组
(3)为什么需要这个函数?
在图像拼接或匹配任务中,我们需要:
- 在两幅图像中找到相同的特征点(关键点)
- 通过这些对应点计算图像间的变换关系
- detectanddescribe函数封装了第一步的关键操作,为后续的匹配和变换计算提供必要数据
(4)输出数据的用途
- kps: 包含了关键点的完整信息,可用于可视化或进一步分析
- kps_float: 简洁的坐标表示,用于几何变换计算
- des: 用于特征点匹配,通过比较描述符可以找到两幅图像中对应的特征点
这个函数是许多计算机视觉任务(如图像拼接、物体识别、3d重建等)的基础步骤。
3. 读取图片并提取特征
# 读取待拼接图片
imagea = cv2.imread('imagea.jpg')
imageb = cv2.imread('imageb.jpg')
# 计算特征点和描述符
(kpsa, kps_floata, desa) = detectanddescribe(imagea)
(kpsb, kps_floatb, desb) = detectanddescribe(imageb)
- imagea 和 imageb 图片如下:

4. 特征点匹配
使用暴力匹配器(bfmatcher)进行特征点匹配:
# 建立暴力匹配器
matcher = cv2.bfmatcher()
rawmatcher = matcher.knnmatch(desb, desa, 2)
# 筛选优质匹配点
good = []
matches = []
for m in rawmatcher:
# 当最近距离跟次近距离的比值小于0.65时,保留此匹配对
if len(m) == 2 and m[0].distance < 0.65 * m[1].distance:
good.append(m)
matches.append((m[0].queryidx, m[0].trainidx))
这里使用了lowe’s ratio test来筛选优质匹配点,比值阈值设为0.65,可以有效去除错误的匹配。
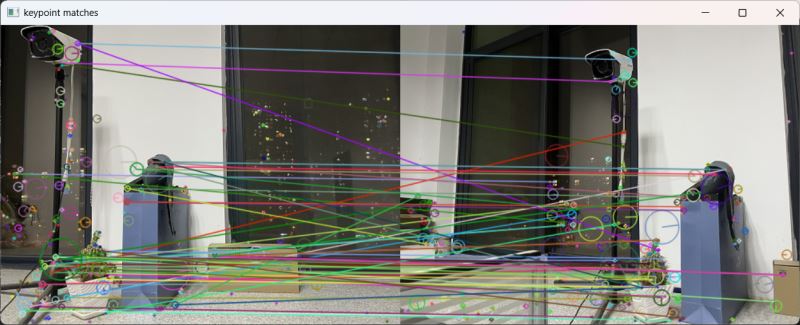
5. 可视化匹配结果
# 绘制匹配结果
vis = cv2.drawmatchesknn(imageb, kpsb, imagea, kpsa, good, none,
flags=cv2.draw_matches_flags_draw_rich_keypoints)
cv_show("keypoint matches", vis)
- 显示效果如下:
6. 计算透 视变换矩阵
当筛选后的匹配点对大于4个时,可以计算透 视变换矩阵:
if len(matches) > 4:
# 获取匹配点的坐标
ptsb = np.float32([kps_floatb[i] for (i, _) in matches])
ptsa = np.float32([kps_floata[i] for (_, i) in matches])
# 使用ransac算法计算单应性矩阵
(h, mask) = cv2.findhomography(ptsb, ptsa, cv2.ransac, 10)
else:
print("图片未找到4个以上的匹配点")
sys.exit()
findhomography函数使用ransac算法来鲁棒地估计变换矩阵,能够有效处理异常值。
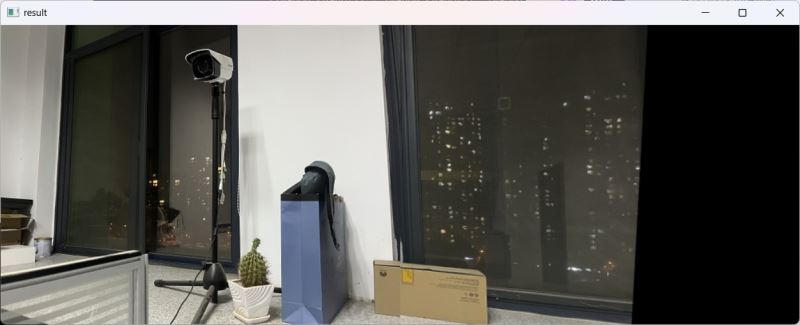
7. 应用变换并拼接图像
# 对imageb应用透 视变换
result = cv2.warpperspective(imageb, h,
(imageb.shape[1] + imagea.shape[1], imageb.shape[0]))
# 将imagea放置在结果图像的左侧
result[0:imagea.shape[0], 0:imagea.shape[1]] = imagea
cv_show('result', result)
- 最终拼接效果图片如下所示:
三、技术要点解析
- sift特征:尺度不变特征变换,对旋转、尺度缩放、亮度变化保持不变性
- 特征匹配:使用k近邻算法进行特征匹配,并通过比值测试筛选优质匹配
- ransac算法:随机抽样一致算法,用于鲁棒地估计变换矩阵
- 透 视变换:通过单应性矩阵将一张图片的视角变换到另一张图片的视角
四、改进方向
- 使用更高效的特征检测算法如orb
- 添加图像融合技术消除拼接缝
- 优化拼接顺序处理多张图片
- 添加曝光补偿处理不同亮度的图片
总结
通过本文的介绍,相信读者已经对基于特征点的图像拼接技术有了全面的了解。这种技术在计算机视觉领域有着广泛的应用,掌握它将为你的图像处理项目带来更多可能性。
以上就是使用python和opencv实现图片拼接的方法的详细内容,更多关于python opencv图像拼接的资料请关注代码网其它相关文章!





发表评论