apollo自动驾驶
前言
本文用于投稿于星火培训:报名链接
1. 雷达的基本概念
1.1 毫米波雷达分类
雷达的分类
• 所发射电磁波的频段,决定了雷达的基本性能特点
• 超视距雷达、微波雷达、毫米波雷达、激光雷达、…
- 按照用途分类:军用,气象,导航,车载
- 按照波长分类:米,分米,厘米,毫米
- 按照波形分类:脉冲,连续波
按照波长和用途分类
- 长波雷达(米,分米),分辨率低,穿透性强
- 一般用于广播,军事预警,卫星通讯等:
短波雷达(厘米,毫米),分辨率高,穿透性差 - 一般用于测绘,短程通讯,车载应用等
按照波形分类
- 脉冲雷达
- 通过脉冲发送和接收的时间差来确定目标的距离
- 不能确定目标的速度
- 连续波雷达
- 发射信号在时间上是连续的
- 发射信号的频率是随着时间变化的(调频连续波)
1.2 信息的传输
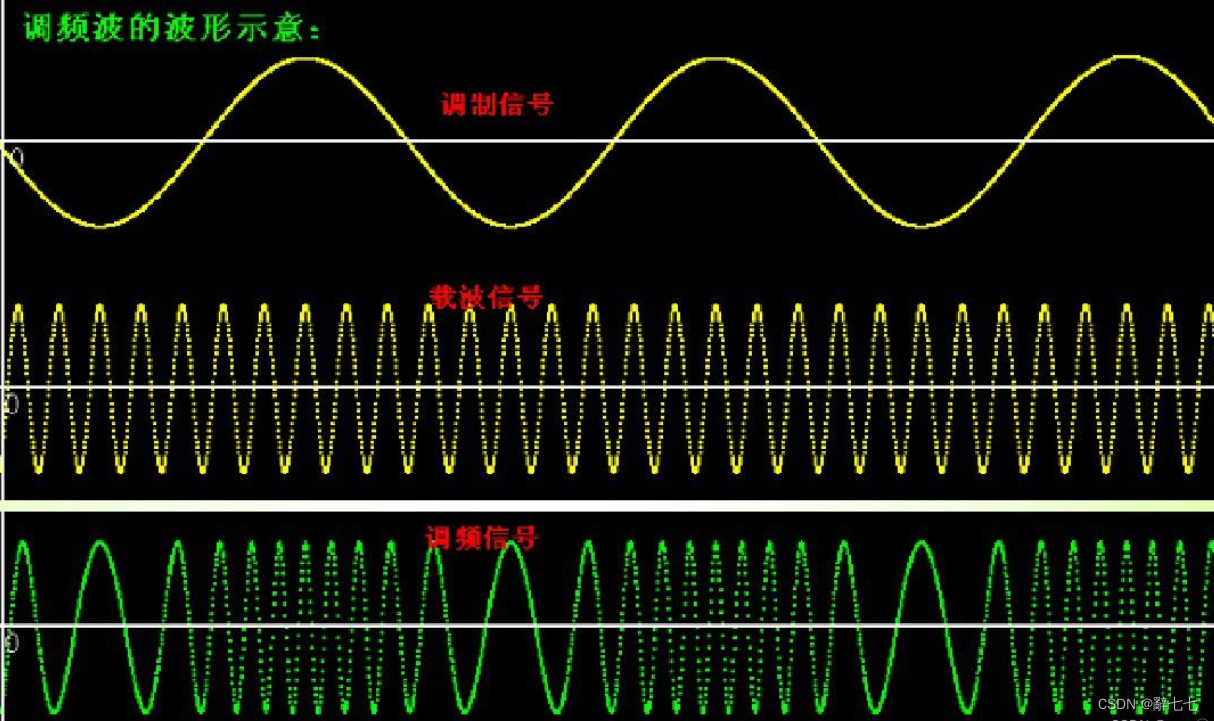
◼ 调制:将调制信号(待传输信息)混合到载波信号(起到载运作
用的信号)的过程,可分为调频,调幅,调相。
◼ 解调:相反的过程,即从混合信号中恢复出待传输信息。
◼ 带宽:调制信号频谱的宽度,带宽高有利于传输更多数据。
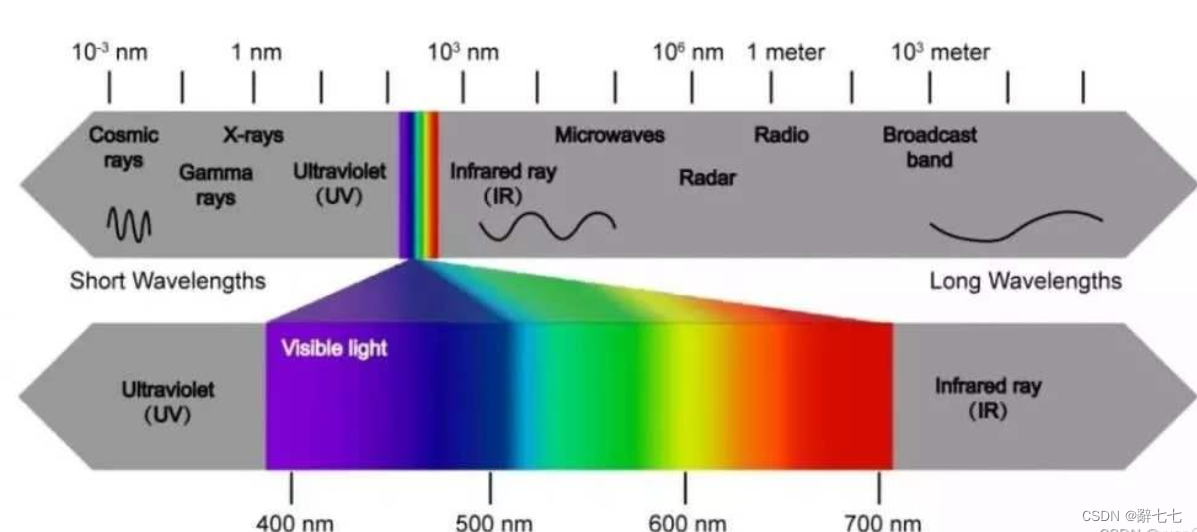
- 毫米波雷达使用的电磁波波长介于1-10mm,波长短、频段宽,比较 容易实现窄波束,雷达分辨率高,不易受干扰
- 早期被应用于军事领域,随着雷达技术的发展与进步,毫米波雷达传 感器开始应用于汽车电子、无人机、智能交通等多个领域。
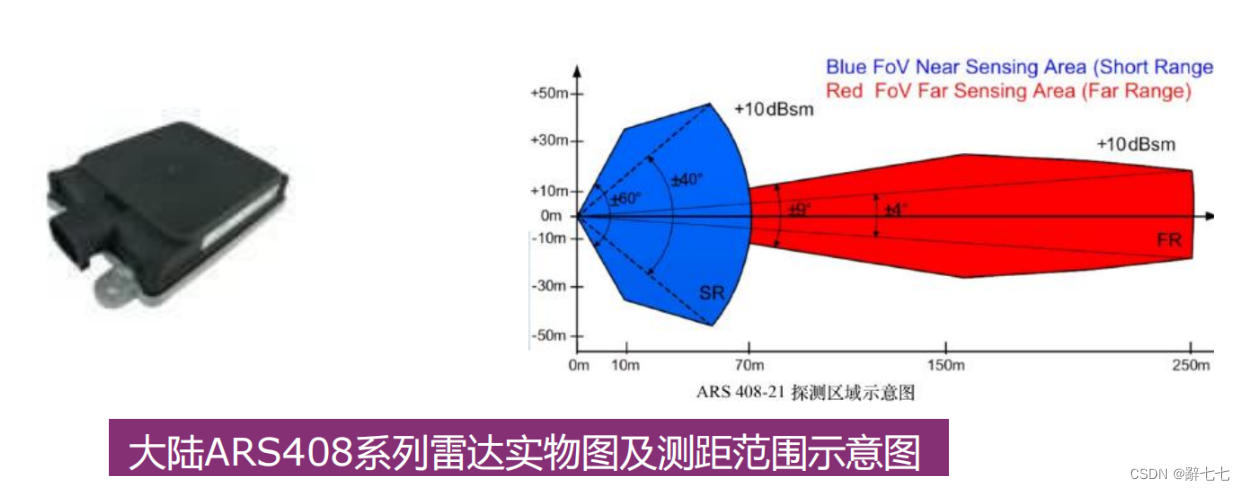
1.3 毫米波雷达的信号频段

1.4 毫米波雷达工作原理
在车载毫米波雷达中,目前主要有三种调制方案:调频连续波(frequency
modulated continuous wave, fmcw),频移键控(frequency shift keying, fsk)以及相移键控(phase shift keying, psk)。
主流车载毫米波雷达所采用的的调制信号为调频连续波fmcw。
其基本原理是在发射端发射一个频率随时间变化的信号,经目标反射后被接收机接收,通过反射信号和接收信号之间的混频,得出两个信号的频率差,随后通过电磁波传播公式和多普勒效应公式求出目标距离和速度.
⚫ 测距测速是通过分析发射和接收的调频连续之间的区别来实现
⚫ 测量角度是通过计算不同天线单元之间的延时差来计算
2. fmcw雷达的工作流程
ps:此部分主要是为了简单理解fmcw雷达的工作原理,是对第一章内容的补充。
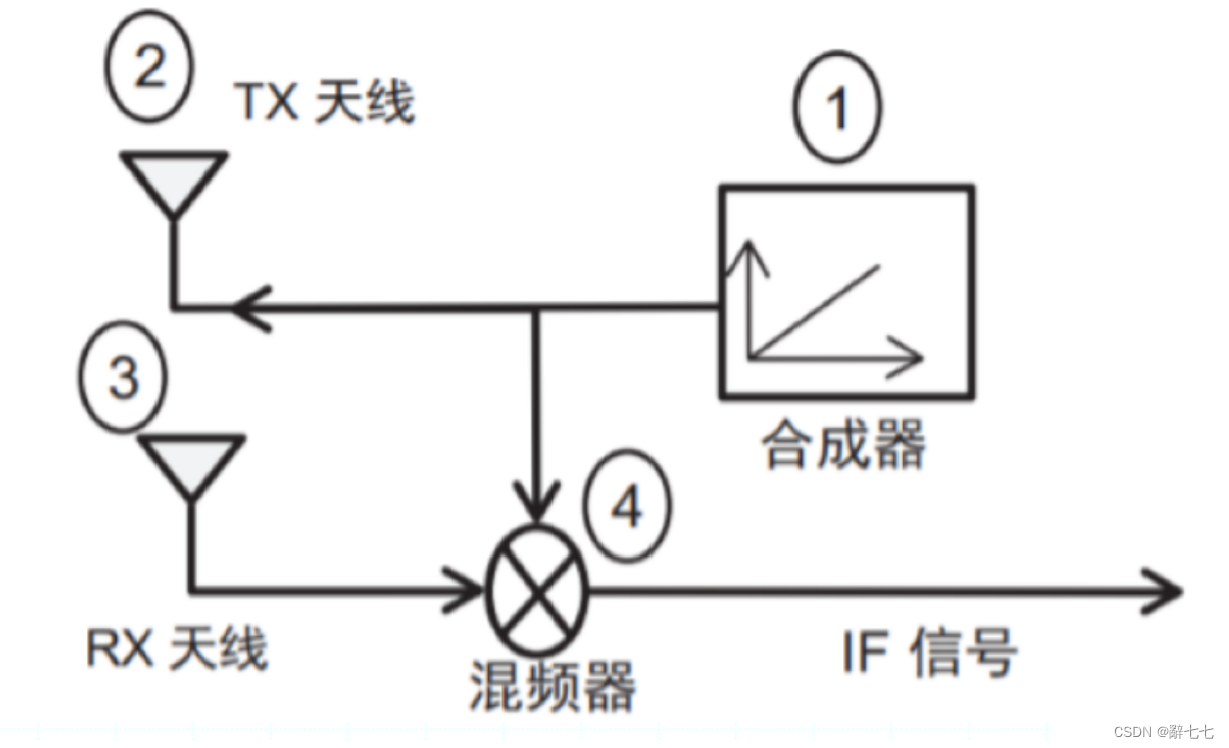
总结一下,fmcw雷达的工作流程:
- 合成器生成一个线性调频信号 ;
- 发射天线( tx )发射线性调频信号;
- 接收天线( rx )捕获目标对线性调频信号的反射;
- 混频器将rx和tx信号合并到一-起,生成一个中频(if )信号。
2.1 线性调频脉冲信号
对于一个脉冲信号
- 信号的频率随时间的变化线性升高
- 起始频率 f c f_c fc,持续时间 t c t_c tc,带宽 b b b,频率变化率 s s s

2.2 混频器
作用:将tx和rx的信号合并生成一个新的信号if
- tx发射信号: x 1 = sin ( 2 π f 1 t + ϕ 1 ) {x_1} = \sin (2\pi {f_1}t + {\phi _1}) x1=sin(2πf1t+ϕ1)
- rx接收信号: x 2 = sin ( 2 π f 2 t + ϕ 2 ) {x_2} = \sin (2\pi {f_2}t + {\phi _2}) x2=sin(2πf2t+ϕ2)
- 中频信号if: x o u t = sin ( 2 π ( f 1 − f 2 ) t + ϕ 1 − ϕ 2 ) = sin ( 2 π δ f t + δ ϕ ) \begin{array}{c}{x_{out}} = \sin (2\pi ({f_1} - {f_2})t + {\phi _1} - {\phi _2})\ = \sin (2\pi \delta ft + \delta \phi )\end{array} xout=sin(2π(f1−f2)t+ϕ1−ϕ2)=sin(2πδft+δϕ)
对于单个静止目标,rx和tx脉冲 之间的时间差是固定为 τ τ τ。因此,频率差也是固定的,也就是说if是一个频率恒定的单音信号。if的 δ f \delta f δf δ ϕ \delta \phi δϕ用以估计速度和距离。
声明
本文参考文献:




发表评论