kuka机器人的安全信号与io模块是相互独立的,即安全信号不是通过io信号接入到机器人里。安全信号主要是指:急停、安全门等属于机器人安全控制类的信号。
一、kuka机器人安全信号的接入方式有以下3种:
1、第一种方式:profisafe,以软件包的形式安装机器人kss系统里,安全信号将通过预先定义的通信协议以profinet总线通讯的方式传递给机器人。因此,这种方式要求客户必须配置profinet 总线通信。
2、第二种方式:cip-safety,以软件包的形式安装机器人kss系统里,安全信号将通过预先定义的通信协议以ethernet ip总线通讯的方式传递给机器人。因此,这种方式要求客户必须配置ethernet ip总线通信。
3、第三种方式:x11接头+sib(safety interface board,用于连接安全信号的接口板),安全信号通过线缆的方式接入x11接头里。
注:①第一种方式和第二种方式一般在汽车厂运用比较多。第三种方式在其他通用领域用的多,比如搬运、码垛、弧焊等。
②:kuka机器人的安全信号均采用双通道方式,以确保系统的安全。
二、安全插头x11的接线方法
由于profisafe、cip-safety两种方式是通过软件通信协议配置安全信号的,在配套plc软件编程中实现。因此,以下是安全信号通过x11接头的接线方法。x11的接线根据控制柜型号不同,接线方式也不一样,以krc4类的控制柜为例。
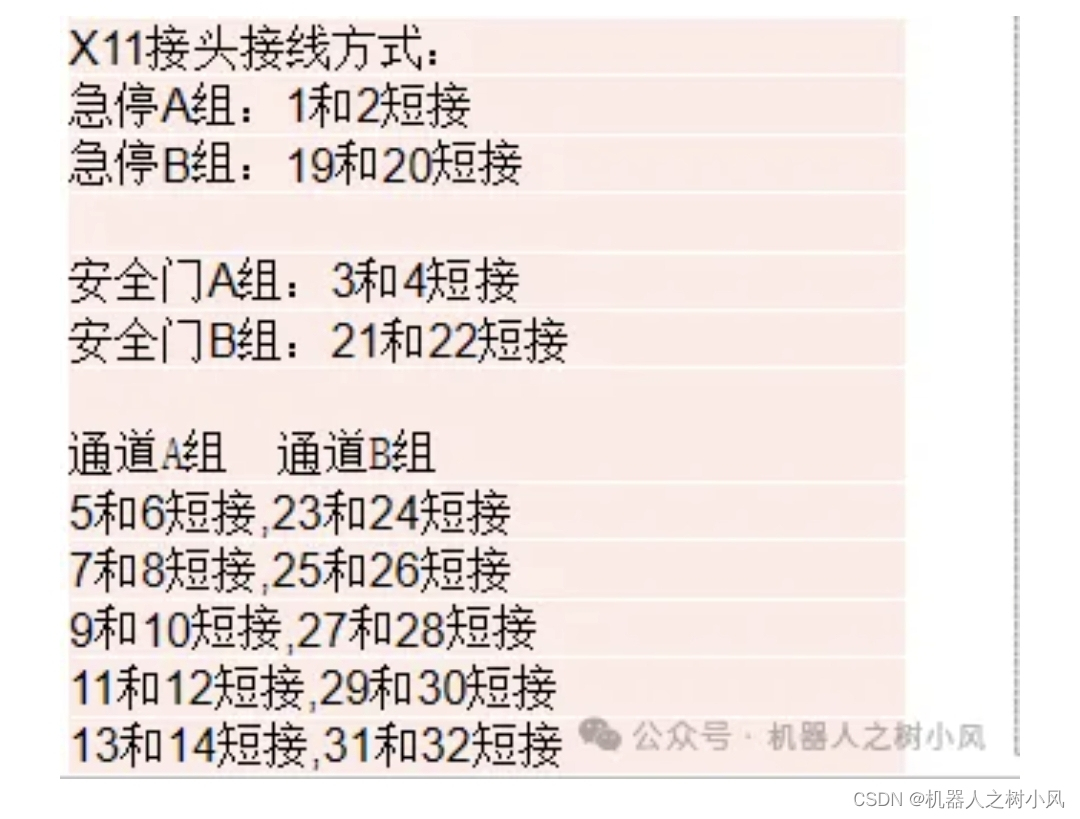
1、kr c4 stand & kr c4 midsize & kr c4 extend 控制柜:
急停、安全门信号说明:建议接入相应的安全装置里,如果确定不需要接入,将相应的通道短接即可,如下所示:
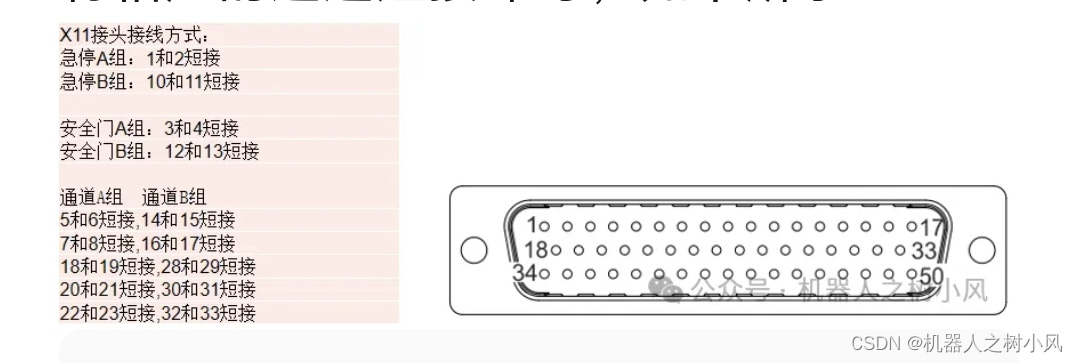
2、kr c4 compact & kr c4 smallsize 控制柜:
急停、安全门信号说明:建议接入相应的安全装置里,如果确定不需要接入,将相应的通道短接即可,如下所示:


发表评论