1 自动驾驶驶向何处?
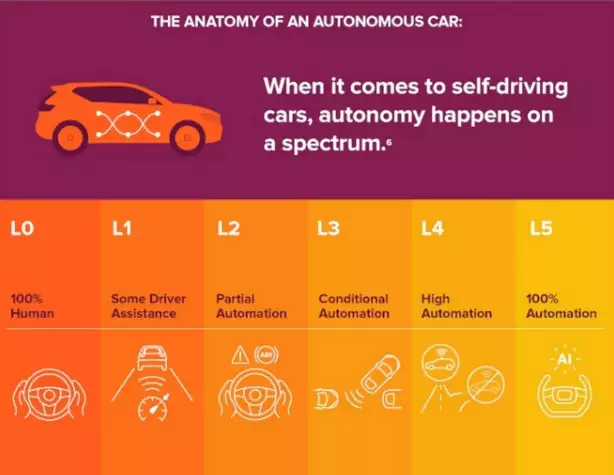
自动驾驶分为五个等级
- l1辅助驾驶
依靠自适应巡航释放双脚但双手不能离开方向盘驾驶员仍需操控汽车 - l2半自动驾驶
驾驶员需要持续监控汽车行驶情况 - l3高度自动驾驶
驾驶员无需持续监控汽车但遇到一些情况驾驶员需根据系统要求介入车辆行驶 - l4更高级别的自动驾驶
在例如开高速或进入停车场的情况下系统自动控制汽车驾驶员无需监控汽车 - l5最高级别的自动驾驶
无人驾驶,此时无需驾驶员
百度创始人、董事长兼ceo李彦宏在2022世界人工智能大会上指出,目前l2级自动驾驶技术已经可以实现大规模商业化,接下来将继续向l3、l4发力。
自动驾驶这项前沿技术的底层逻辑是什么呢?在自动驾驶技术栈中,主要分为感知、决策规划和控制三个模块。
感知模块就像是人的眼睛和耳朵,负责对外部环境进行感知,包含定位、建图、传感器融合等技术;控制模块就像人的手脚,负责将指令传达到电机、引擎,包含鲁棒控制、模型预测控制等技术;决策规划模块就像人的大脑,基于接收到的感知信息进行行为预测、决策,并生成指令传达给控制模块。
在决策规划中,有一类技术称为运动规划,那么什么是运动规划呢?
2 什么是运动规划?
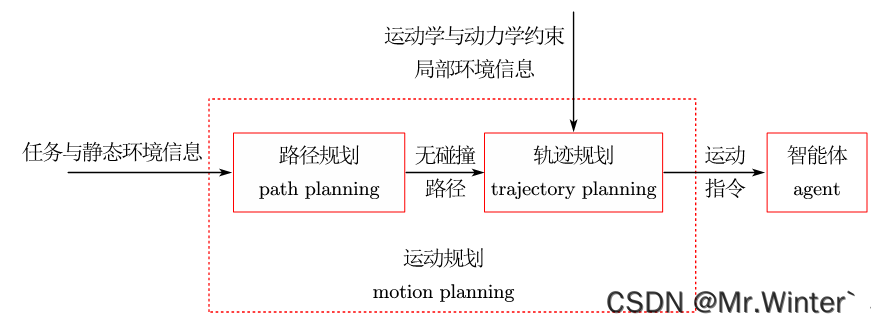
运动规划(motion planning)以最优性为核心,在环境中给定起点和终点的条件下,规划机器人无冲突行进的状态序列。运动规划框架如下所示,主要包含路径规划与轨迹规划两大组件。
那路径规划和轨迹规划有什么区别和联系呢?
-
路径规划(path planning)
以可达性为核心,基于路径约束(如障碍物),规划机器人首末位置间无冲突行进的最优路径序列。
-
轨迹规划(trajectory planning)以稳定性和快速性为核心,基于运动学、动力学约束和路径序列,规划运动状态 以逼近全局路径。
一般地,路径规划的输入是全局静态环境,也称为全局规划(global planning);轨迹规划的输入是全局路径、动态环境和模型约束,通常在局部范围内进行动态避障和路径跟踪,也称为局部规划(local planning)。
本专栏将重点介绍路径规划和轨迹规划技术,并且采用工程上常用的ros c++以及仿真中常用的python/matlab三种语言对常见的规划算法进行实现,帮助读者理解原理。同时,辅以部分控制原理、传感技术、常见机器人运动学与动力学建模,弥补一些运动规划的底层知识,具体大纲如下
3 运动规划实战教程
🔥 专栏地址:
🚀 第零章——自动控制原理
- 控制原理 | matlab控制系统仿真常用功能合集
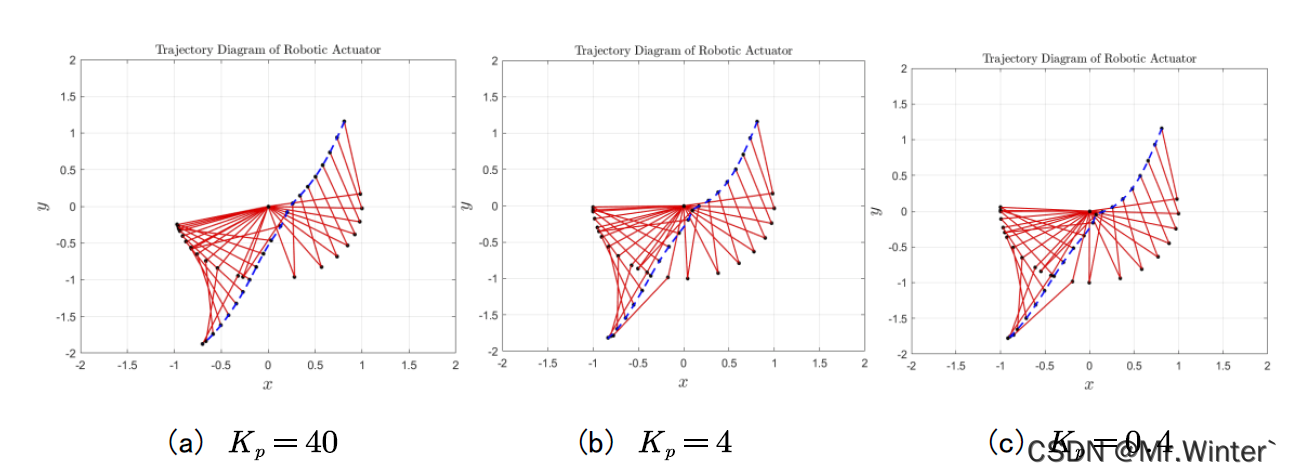
- 控制原理 | pid控制的三个参数如何影响控制效果?(附参数整定方法)
- 控制原理 | 你真的分得清系统误差、随机误差和偶然误差吗?(含例题)
- 控制原理 | 深刻理解傅里叶级数与傅里叶变换的关系
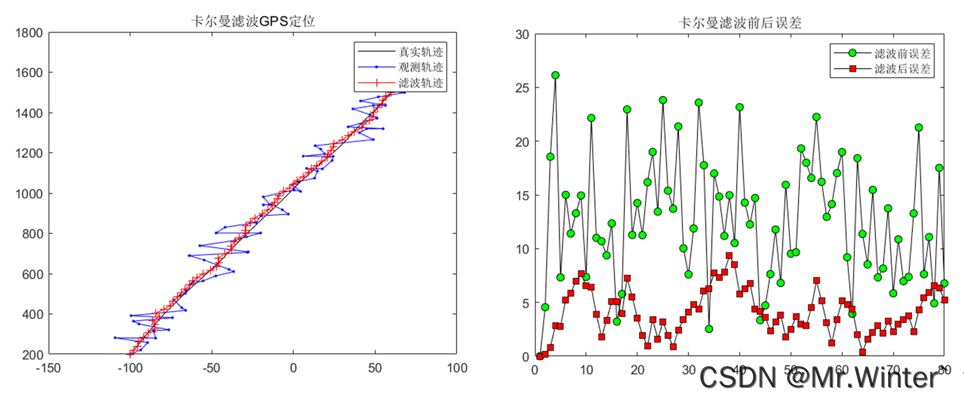
- 控制原理 | 详细总结卡尔曼滤波原理+具体案例分析
🚀 第一章——常见机器人建模
- 建模分析 | 仿人机器人(五连杆、七连杆)拉格朗日动力学建模
- 建模分析 | 平面2r机器人(二连杆)运动学与动力学建模(附matlab仿真)
- 建模分析 | 差速轮式移动机器人运动学建模(附python/matlab仿真)
- 建模分析 | 阿克曼机器人运动学建模(附python/matlab仿真)
🚀 第二章——常用地图结构解析
- 地图结构 | 图解占据栅格地图原理(附matlab建图实验)
- 地图结构 | 图解代价地图原理(附ros c++仿真)
- 地图结构 | 图解维诺图voronoi原理(附c++/python/matlab仿真)
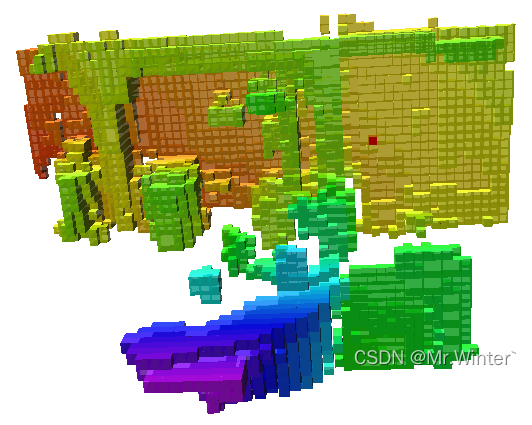
- 地图结构 | 详解八叉树octomap原理与rviz可视化
🚀 第三章——全局规划之图搜索
- 路径规划 | 图解a*、dijkstra、gbfs算法的异同(附c++/python/matlab仿真)
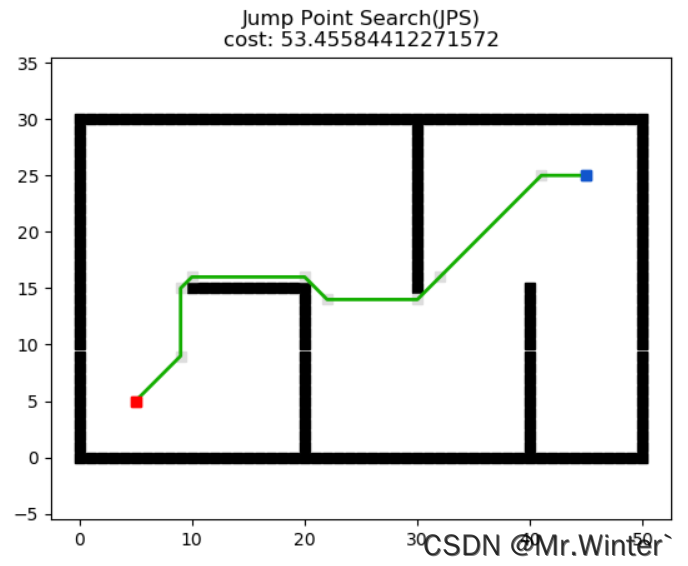
- 路径规划 | 图解跳点搜索jps算法(附ros c++/python/matlab仿真)
- 路径规划 | 图解theta*算法(附ros c++/python/matlab仿真)
- 路径规划 | 图解lazy theta*算法(附ros c++/python/matlab仿真)
- 路径规划 | 图解动态a*(d*)算法(附ros c++/python/matlab仿真)
- 路径规划 | 图解lpa*算法(附ros c++/python/matlab仿真)
- 路径规划 | 图解d* lite算法(附ros c++/python/matlab仿真)
- 路径规划 | 详解维诺图voronoi算法(附ros c++/python/matlab仿真)
- 路径规划 | 详解混合a*算法hybrid a*(附ros c++/python/matlab仿真)
🚀 第四章——全局规划之采样搜索
- 路径规划 | 图解概率路图prm原理及其参数分析
- 路径规划 | 图解rrt算法(附ros c++/python/matlab仿真)
- 路径规划 | 图解rrt*算法(附ros c++/python/matlab仿真)
- 路径规划 | 图解rrt-connect算法(附ros c++/python/matlab仿真)
- 路径规划 | 图解informed rrt*算法(附ros c++/python/matlab仿真)
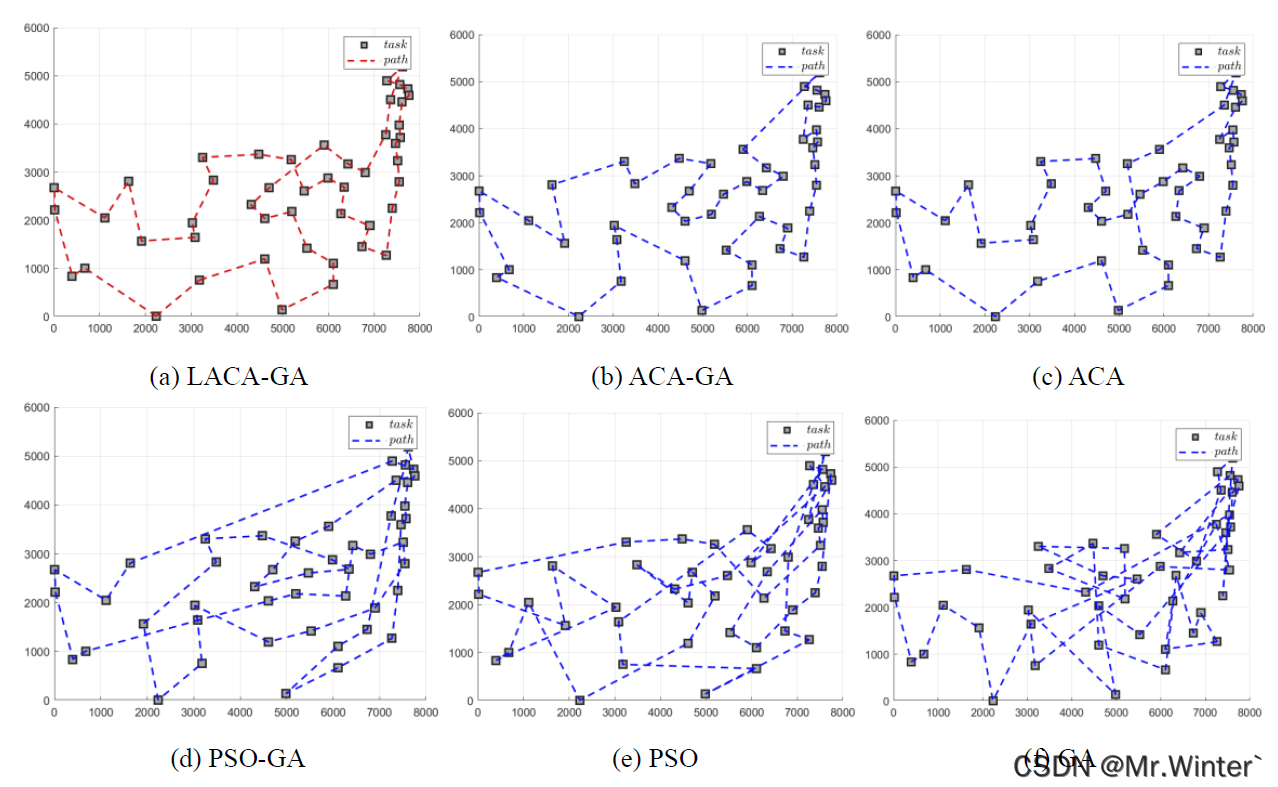
🚀 第五章——智能算法
- 路径规划 | 蚁群算法图解与分析(附ros c++/python/matlab仿真)
- 路径规划 | 图解粒子群算法pso(附ros c++/python/matlab仿真)
- 路径规划 | 图解遗传算法ga(附ros c++/python/matlab仿真)
🚀 第六章——局部路径规划
- 轨迹规划 | 图解路径跟踪pid算法(附ros c++/python/matlab仿真)
- 轨迹规划 | 图解最优控制lqr算法(附ros c++/python/matlab仿真)
- 轨迹规划 | 图解模型预测控制mpc算法(附ros c++/python/matlab仿真)
- 轨迹规划 | 图解动态窗口算法dwa(附ros c++/python/matlab仿真)
- 轨迹规划 | 图解分析人工势场算法apf(附ros c++/python/matlab仿真)
- 轨迹规划 | 图解纯追踪算法pure pursuit(附ros c++/python/matlab仿真)
- 轨迹规划 | 图解teb算法(附ros c++/python/matlab仿真)
🚀 第七章——曲线生成与轨迹规划
- 曲线生成 | 基于多项式插值的轨迹规划(附ros c++/python/matlab仿真)
- 曲线生成 | 图解贝塞尔曲线生成原理(附ros c++/python/matlab仿真)
- 曲线生成 | 图解三次样条曲线生成原理(附ros c++/python/matlab仿真)
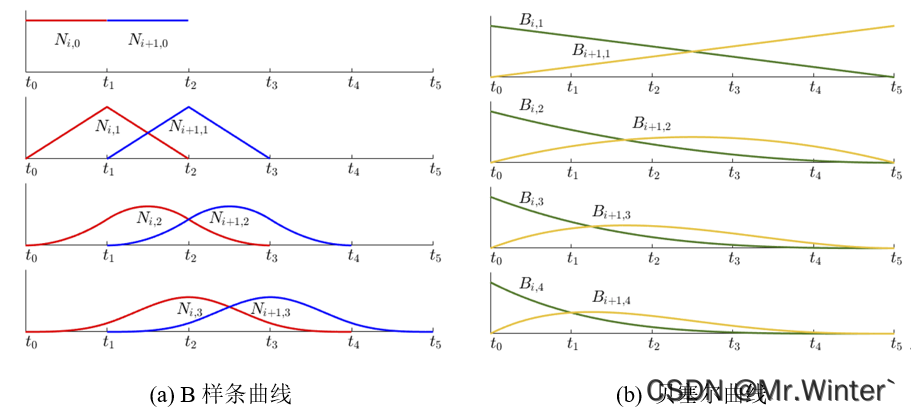
- 曲线生成 | 图解b样条曲线生成原理(基本概念与节点生成算法)
- 曲线生成 | 图解b样条曲线生成原理(附ros c++/python/matlab仿真)
- 曲线生成 | 图解dubins曲线生成原理(附ros c++/python/matlab仿真)
- 曲线生成 | 图解reeds-shepp曲线生成原理(附ros c++/python/matlab仿真)
🚀 第八章——趣味应用
- 趣味应用 | 硬核,你见过机器人玩“密室逃脱”吗?(附代码)
- 趣味应用 | 硬核,机器人只需5秒就跟踪上了爱心曲线
- 趣味应用 | 硬核,这年头机器人都开始自学“倒车入库”了
- 趣味应用 | 工程师的浪漫:用机械臂画一个爱心
4 加入我们
目前博主正在组建机器人技术交流群,群中成员是有明确共同目标,共同愿景的,这样才能共同成长。所以如果苦于闭门造车、无人交流,就请加入我们(下方名片),让我们一起从理论到实践攻克运动规划,为从事相关工作或科研打下基础!

当然群里也配套长期更新的资源福利等你领取!
5 订阅需知
- 上面给出的是教程的大致大纲,后面可能会有顺序和内容的调整,但可以保证内容量只增不减
- 各个算法基本都提供c++/python/matlab三个版本的实现,便于应对各种需求;但同时工程量较大,故后期会涨价
- 更新频率为两周1更,篇篇精品
🔥 更多精彩专栏:



发表评论