前言:本文为手把手教学飞控核心知识点之一的姿态解算——mpu6050 姿态解算(飞控专栏第2篇)。项目中飞行器使用 mpu6050 传感器对飞行器的姿态进行解算(四元数方法),搭配设计的卡尔曼滤波器与一阶低通滤波器进行数据滤波。当然,本篇博客也将为读者朋友教学业内匿名者上位机的代码移植和使用方法。为了方便读者朋友学习,本博客将使用传感器模块替代整机进行教学,方便读者朋友后续根据自己实际情况移植!(文末有代码开源!)
实验硬件: stm32f103c8t6;mpu6050;usb转ttl
硬件实物图:
效果图:
一、飞行器姿态解算
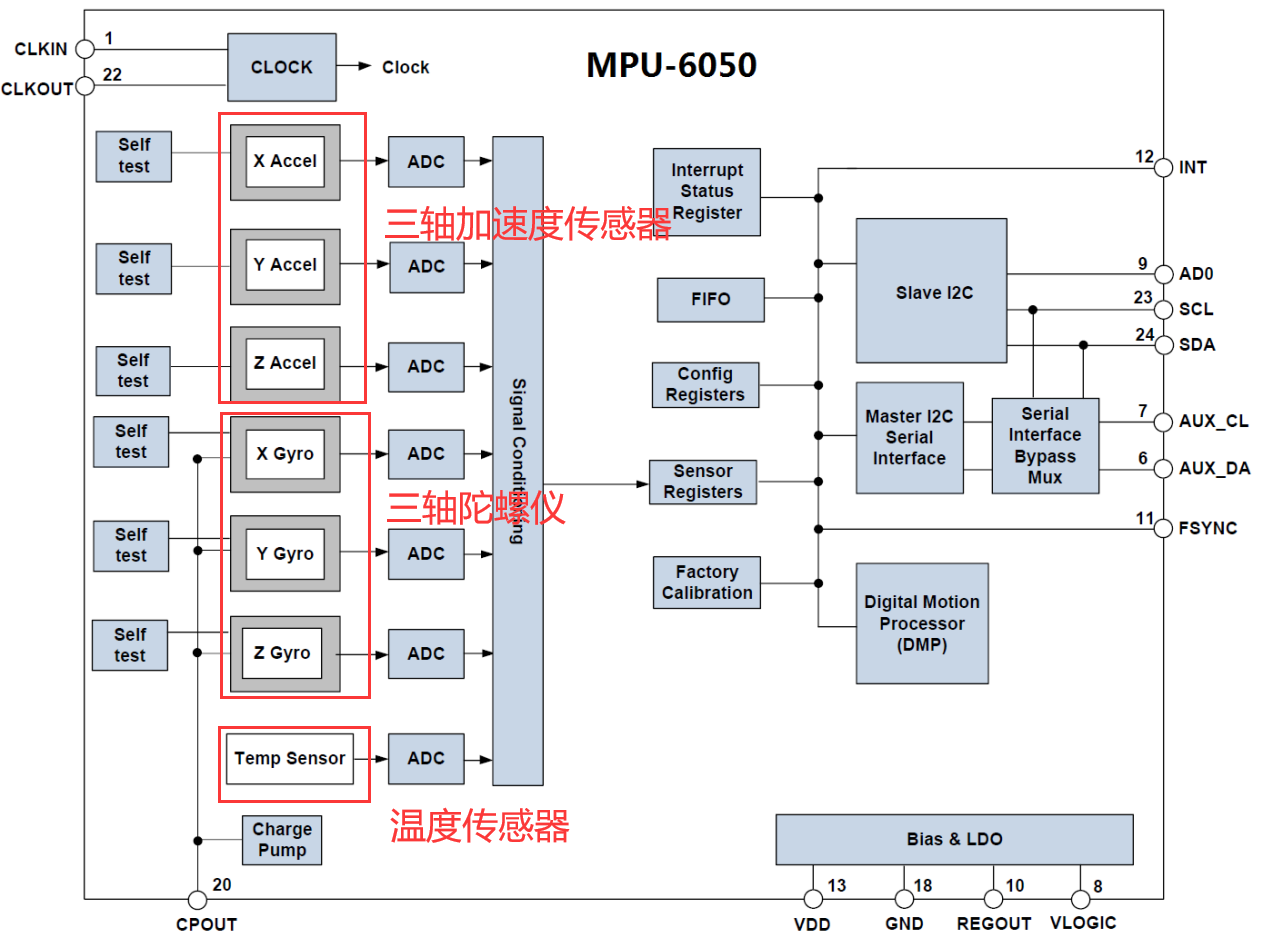
1.1 mpu6050概述
飞行器通常搭载一款姿态传感器(不管是六轴还是九轴姿态传感器),本项目中以最常见的 mpu6050 为例。mpu6050 传感器其实并不能直接输出我们飞行器飞行过程中的欧拉角(euler-angles),通过读取它的传感器我们可以得到:3轴角速度+3轴角加速度。得到的角速度和角加速度信息我们是无法直接使用的,这个时候我们可以选择使用 dmp 去解算此时飞行器的欧拉角(euler-angles)情况。当然,作者在项目中并没有使用 dmp 去解算飞行器的欧拉角(euler-angles),而是使用了四元数解算的方法!
1.2 四元数姿态解算
本小节将以下方思维导图进行分析讲解:
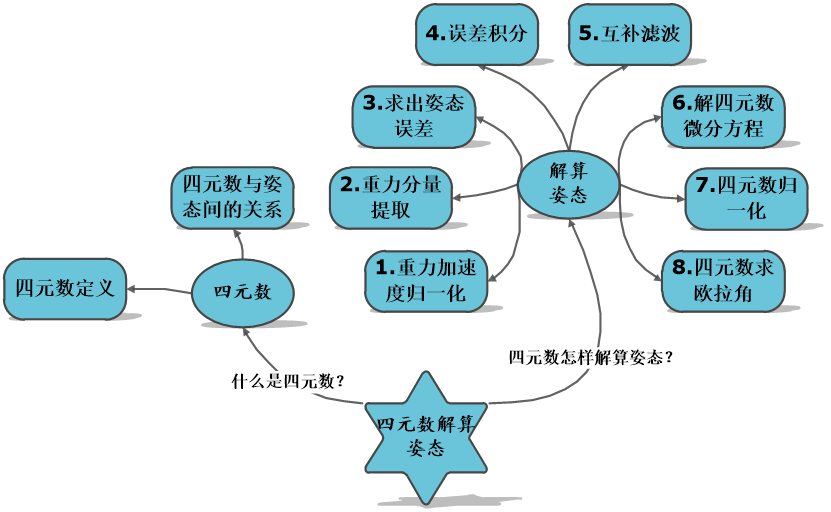
下面我们根据思维导图用程序来一步一步实现如何求解欧拉角:
1、定义初始四元数的值为q0=1,q1=0,q2=0,q3=0。
2、读取加速度计值、角速度值,程序定义变量分别为ax、ay、az,gx、gy、gz,将陀螺仪值转为弧度,转换如下:
gx = gx * 0.0174f; //1度=0.0174弧度
gy = gy * 0.0174f;
gz = gz * 0.0174f; 3、对加速度值进行归一化
//提取等效旋转矩阵中的重力分量
gravity.x = 2*(numq.q1 * numq.q3 - numq.q0 * numq.q2);
gravity.y = 2*(numq.q0 * numq.q1 + numq.q2 * numq.q3);
gravity.z = 1-2*(numq.q1 * numq.q1 + numq.q2 * numq.q2);
//加速度归一化
normacc = 1/sqrt(squa(mpu6050.accx)+ squa(mpu6050.accy) +squa(mpu6050.accz));
//归一化计算
acc.x = pmpu->accx * normacc;
acc.y = pmpu->accy * normacc;
acc.z = pmpu->accz * normacc;4、提取姿态矩阵中的重力分量,我们已经得到数学计算公式为
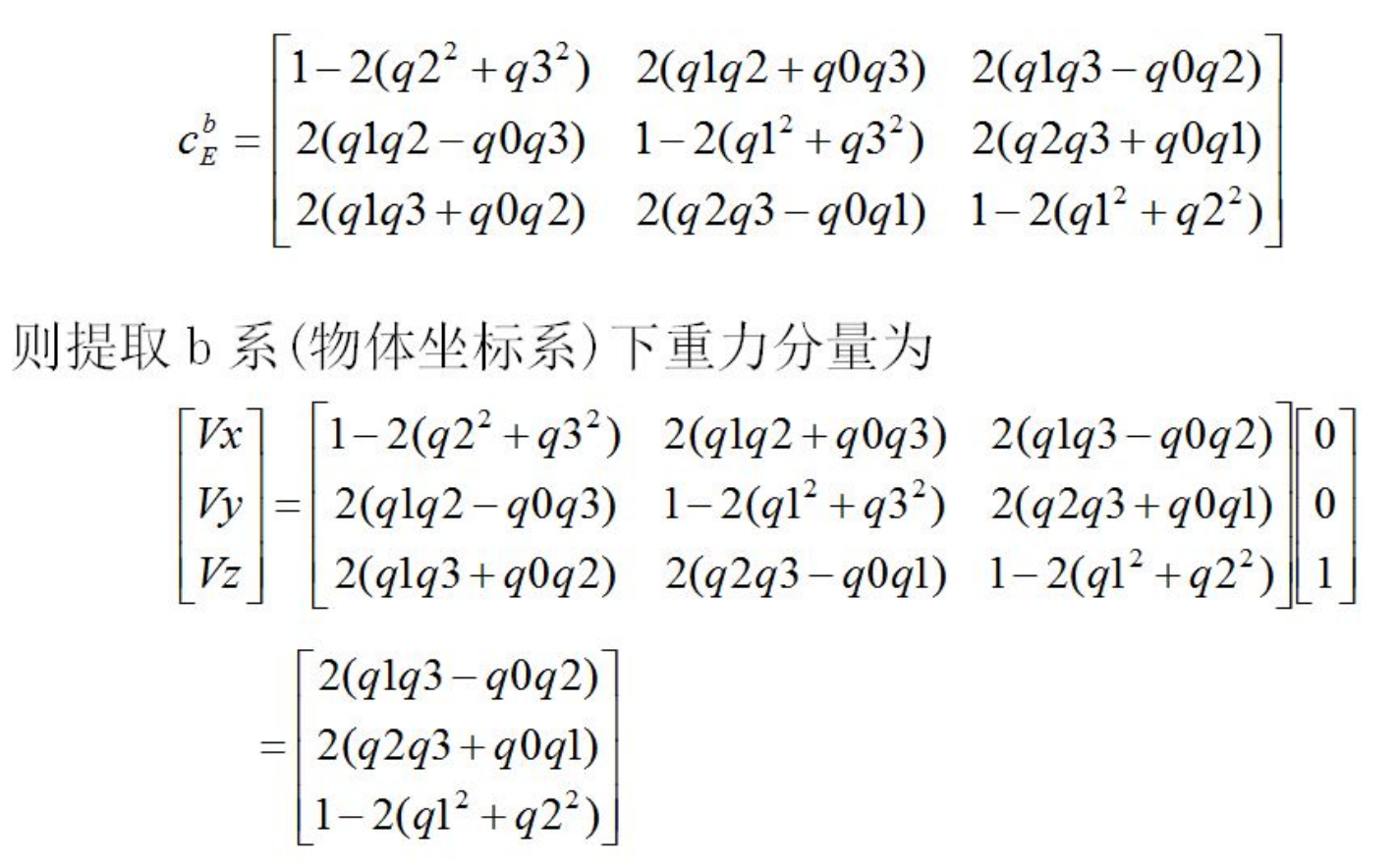
//提取等效旋转矩阵中的重力分量
gravity.x = 2*(numq.q1 * numq.q3 - numq.q0 * numq.q2);
gravity.y = 2*(numq.q0 * numq.q1 + numq.q2 * numq.q3);
gravity.z = 1-2*(numq.q1 * numq.q1 + numq.q2 * numq.q2); 5、求姿态误差,对两向量进行叉乘(定义ex、ey、ez为三个轴误差元素),数学计算为:
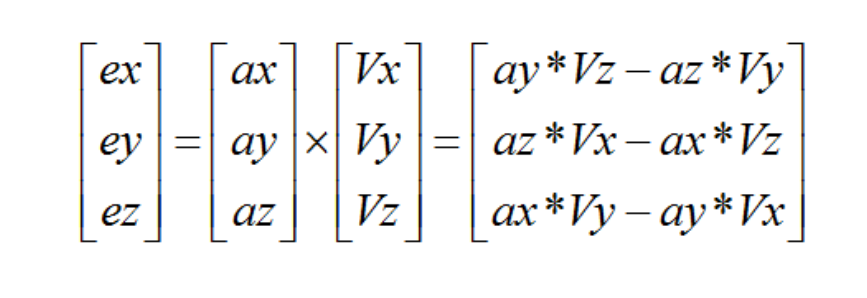
//向量差乘得出的值
accgravity.x = (acc.y * gravity.z - acc.z * gravity.y);
accgravity.y = (acc.z * gravity.x - acc.x * gravity.z);
accgravity.z = (acc.x * gravity.y - acc.y * gravity.x);6、互补滤波,将误差输入pid控制器后与陀螺仪测得的角速度相加,修正角速度值,程序实现如下(kp为互补滤波系数这里取kp=0.5,实际值根据需要进行调整):

//角速度融合加速度积分补偿值
gyro.x = pmpu->gyrox * gyro_gr + kpdef * accgravity.x + gyrointegerror.x;//弧度制
gyro.y = pmpu->gyroy * gyro_gr + kpdef * accgravity.y + gyrointegerror.y;
gyro.z = pmpu->gyroz * gyro_gr + kpdef * accgravity.z + gyrointegerror.z;7、解四元数微分方程,其数学计算如下(初始值q0 = 1,q1 = 0,q2 = 0,q3 = 0, 为角速度,
为角速度, 为周期时间)
为周期时间)
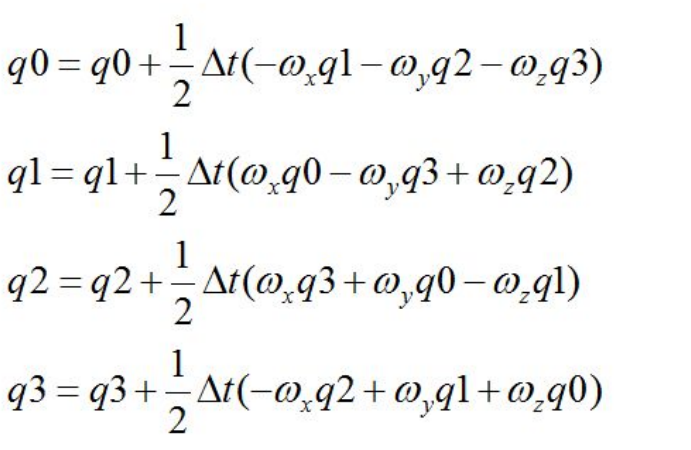
// 一阶龙格库塔法, 更新四元数
q0_t = (-numq.q1*gyro.x - numq.q2*gyro.y - numq.q3*gyro.z) * halftime;
q1_t = ( numq.q0*gyro.x - numq.q3*gyro.y + numq.q2*gyro.z) * halftime;
q2_t = ( numq.q3*gyro.x + numq.q0*gyro.y - numq.q1*gyro.z) * halftime;
q3_t = (-numq.q2*gyro.x + numq.q1*gyro.y + numq.q0*gyro.z) * halftime;
numq.q0 += q0_t;
numq.q1 += q1_t;
numq.q2 += q2_t;
numq.q3 += q3_t;8、四元数归一化,归一化方法与加速度归一化方法一样;
// 四元数归一化
normquat = 1/sqrt(squa(numq.q0) + squa(numq.q1) + squa(numq.q2) + squa(numq.q3));
numq.q0 *= normquat;
numq.q1 *= normquat;
numq.q2 *= normquat;
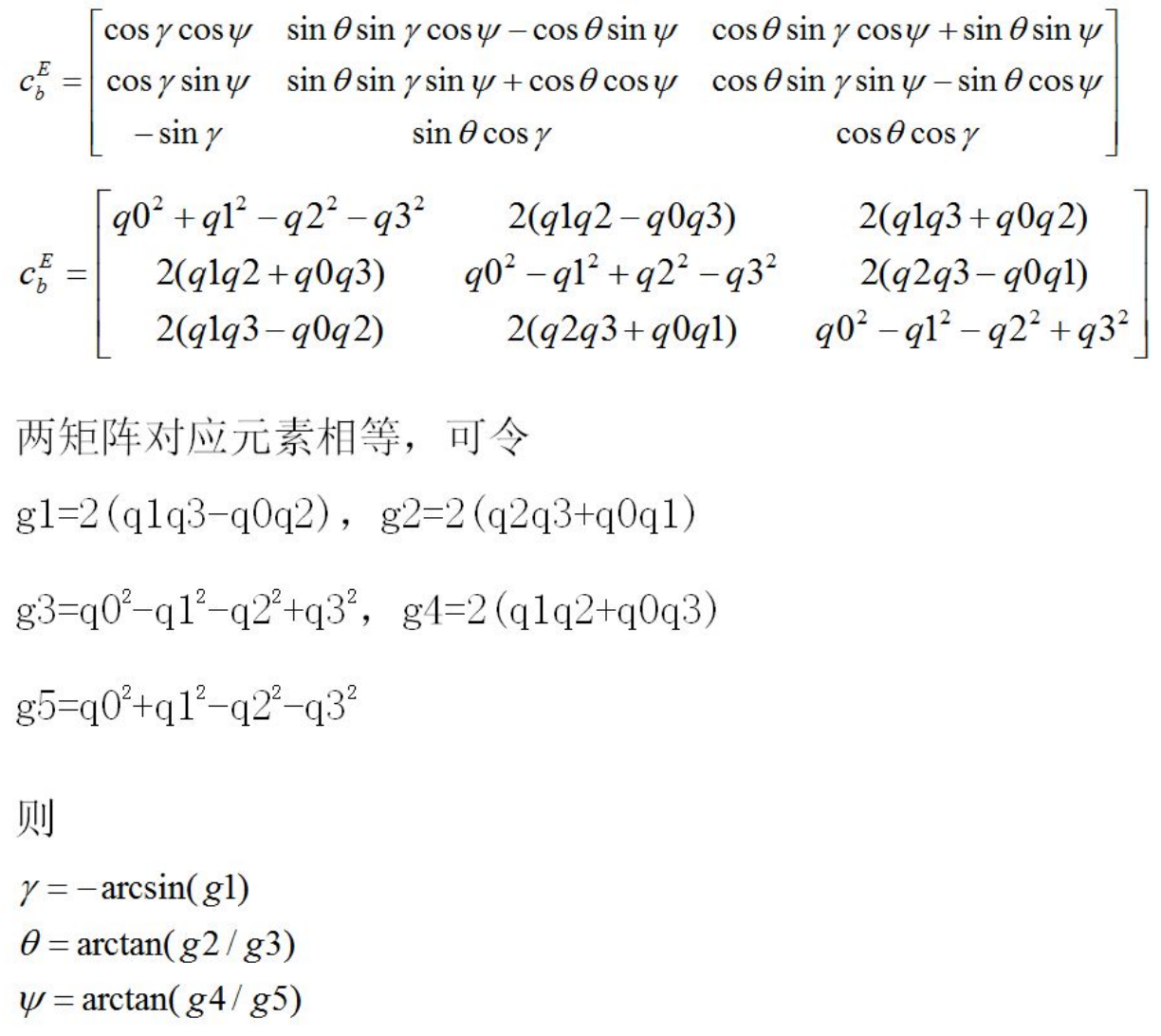
numq.q3 *= normquat; 9、计算姿态角,数学公式为:
#ifdef yaw_gyro
*(
float *)pange = atan2f(2 * numq.q1 *numq.q2 + 2 * numq.q0 * numq.q3, 1 - 2 * numq.q2 *numq.q2 - 2 * numq.q3 * numq.q3) * rta; //yaw
#else
float yaw_g = pmpu->gyroz * gyro_g;
if((yaw_g > 1.0f) || (yaw_g < -1.0f)) //数据太小可以认为是干扰,不是偏航动作
{
pange->yaw += yaw_g * dt;
}
#endif
pange->pitch = asin(2 * numq.q0 *numq.q2 - 2 * numq.q1 * numq.q3) * rta;
pange->roll = atan2(2 * numq.q2 *numq.q3 + 2 * numq.q0 * numq.q1, 1 - 2 * numq.q1 *numq.q1 - 2 * numq.q2 * numq.q2) * rta; //pitch 二、卡尔曼滤波详解
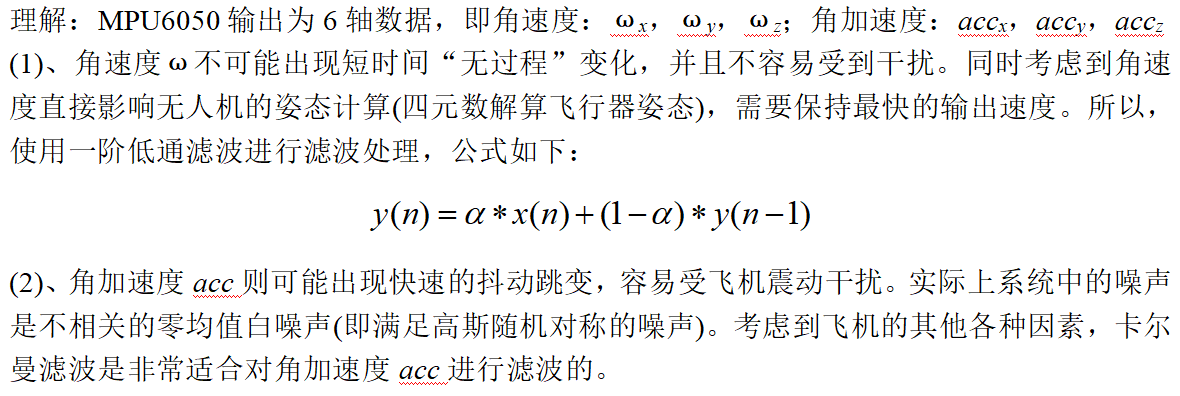
在飞行器中卡尔曼滤波的高效率性是十分优秀的,但是卡尔曼不能抵抗突变干扰,这点在飞行器中一般不会出现数据突变跳变,所以卡尔曼很适合运用于四轴飞行器。
飞行器项目中卡尔曼滤波的目标对象是加速度,三轴加速度都是独立变量,可以分别独立用一维线性卡尔曼进行滤波。由于加速度容易受震动干扰,它就是一个很典型的高频高斯白噪声(噪声随机,对称,符合高斯分布的噪声),所以加速度用卡尔曼滤波。
角速度不容易受到干扰,就用简单的一阶低通互补滤波。
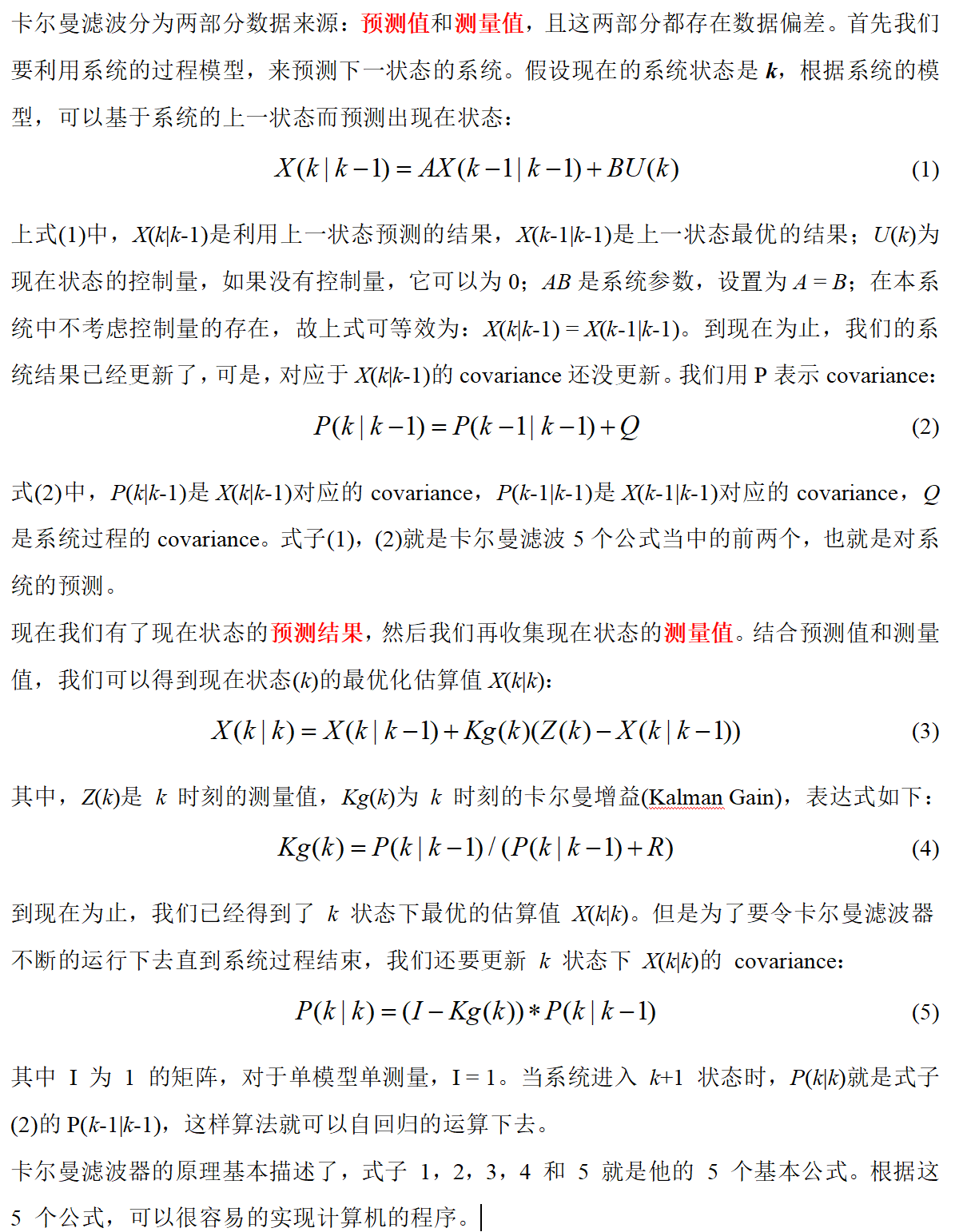
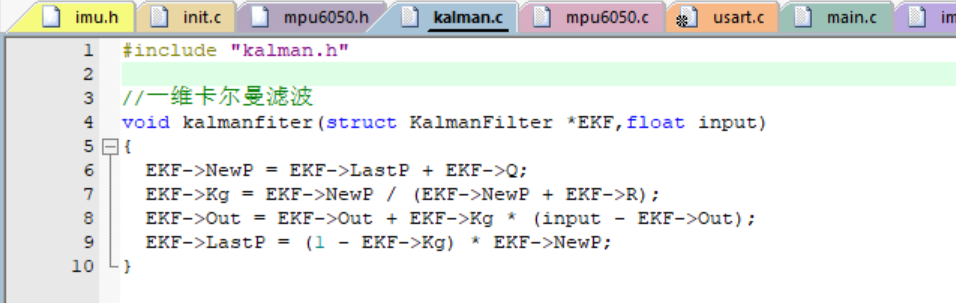
将上述数学公式代码化后可以得到卡尔曼滤波代码:
#include "kalman.h"
//一维卡尔曼滤波
void kalmanfiter(struct kalmanfilter *ekf,float input)
{
ekf->newp = ekf->lastp + ekf->q;
ekf->kg = ekf->newp / (ekf->newp + ekf->r);
ekf->out = ekf->out + ekf->kg * (input - ekf->out);
ekf->lastp = (1 - ekf->kg) * ekf->newp;
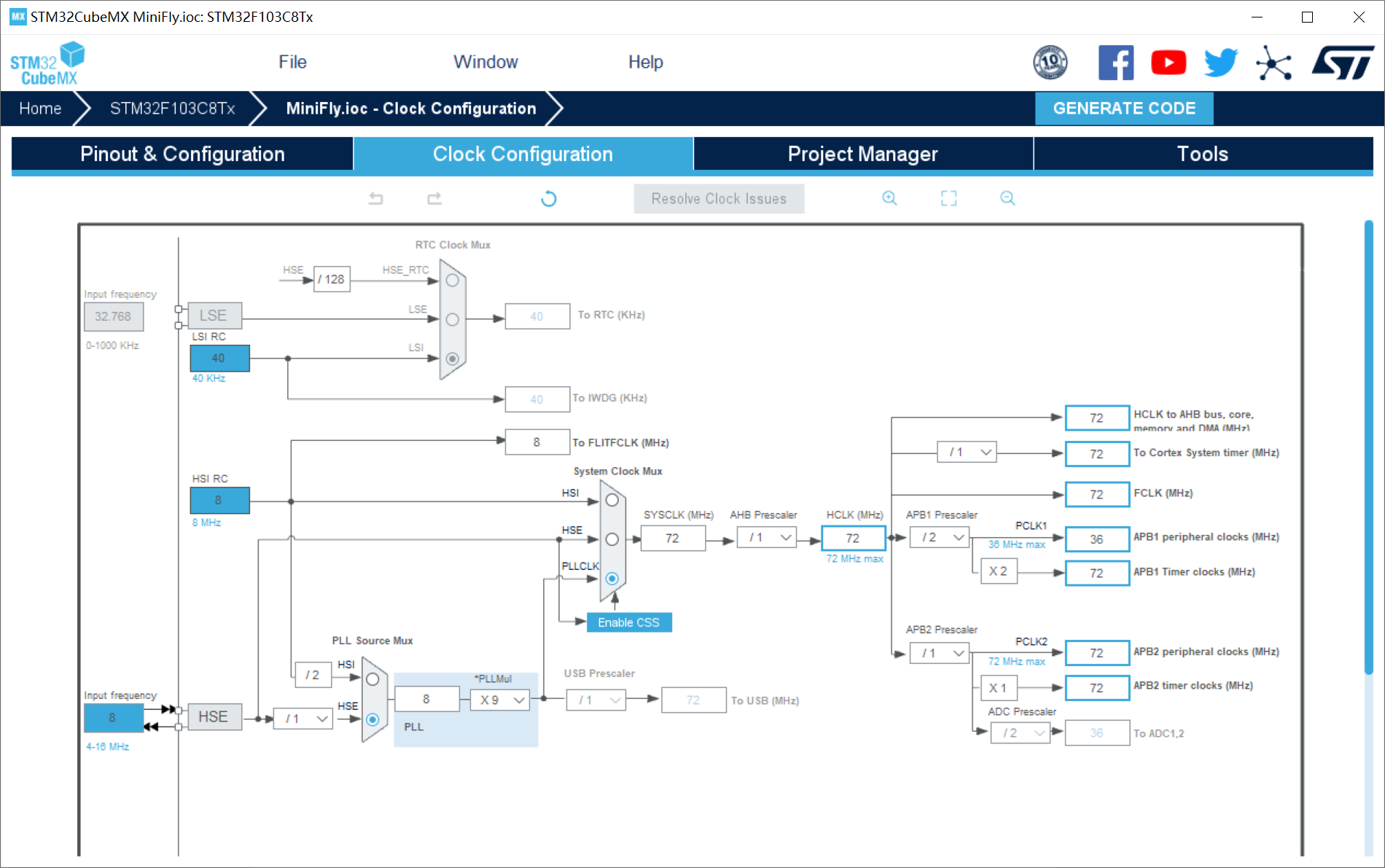
}三、cubemx配置
1、rcc配置外部高速晶振(精度更高)——hse;
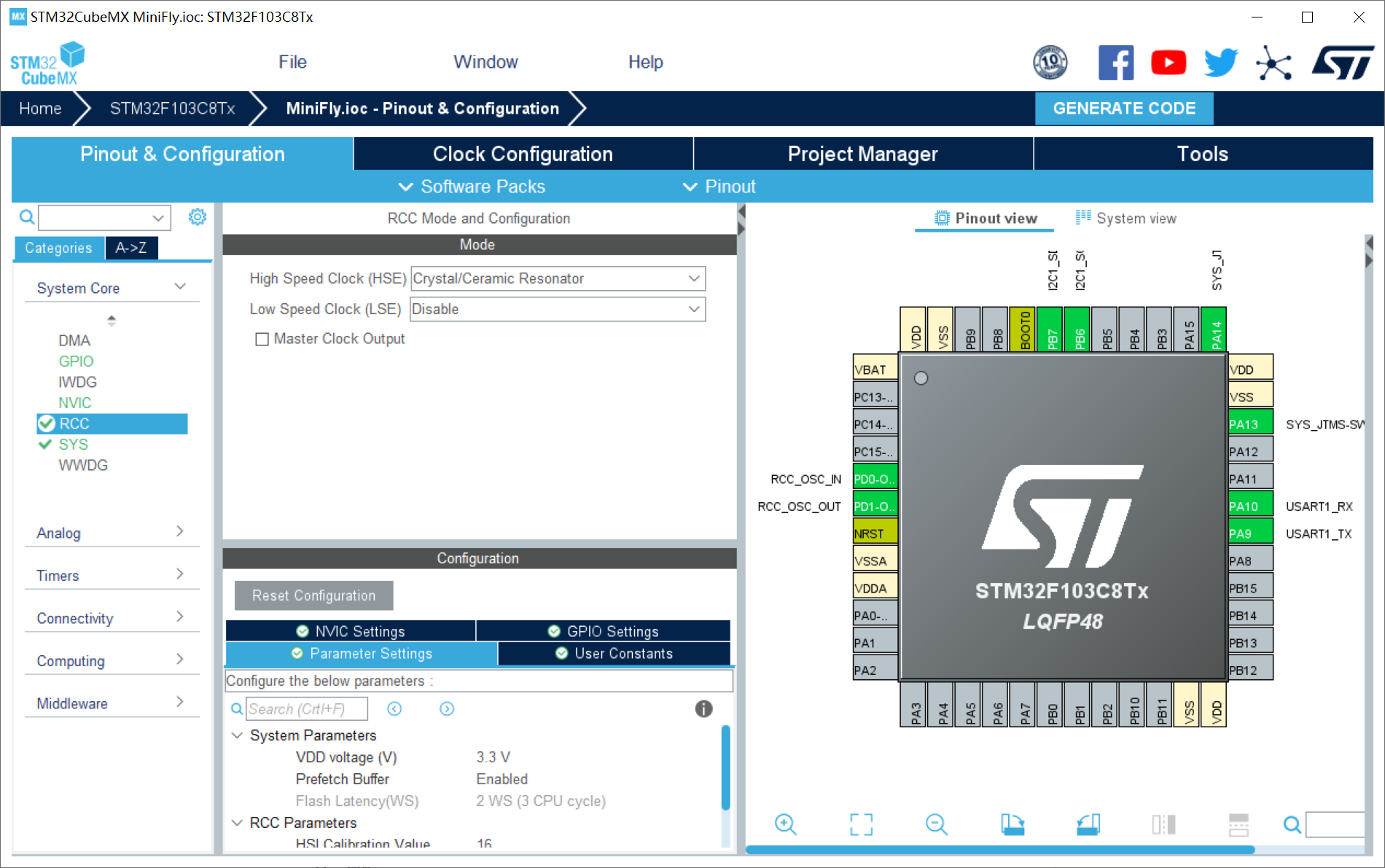
2、sys配置:debug设置成serial wire(否则可能导致芯片自锁);
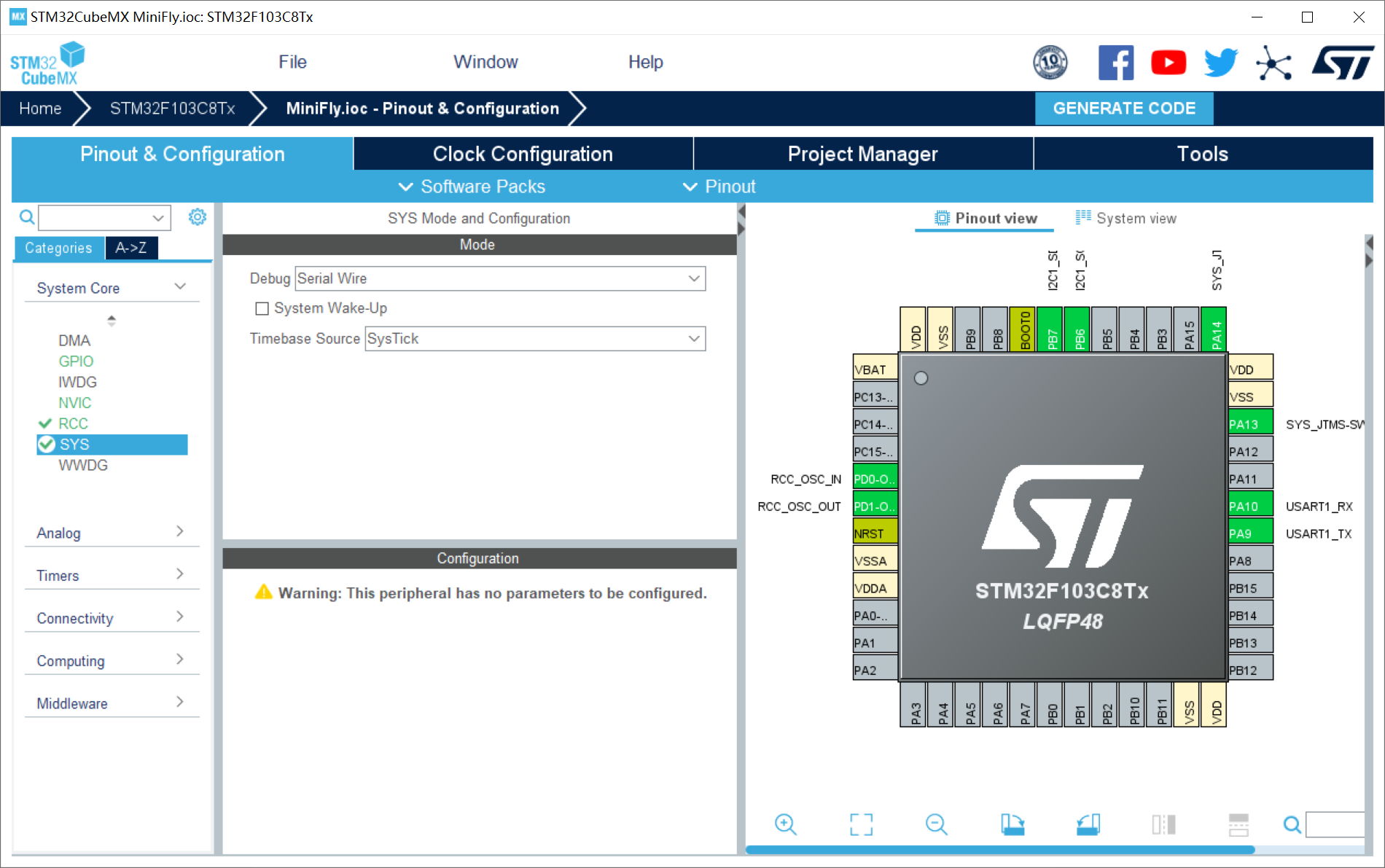
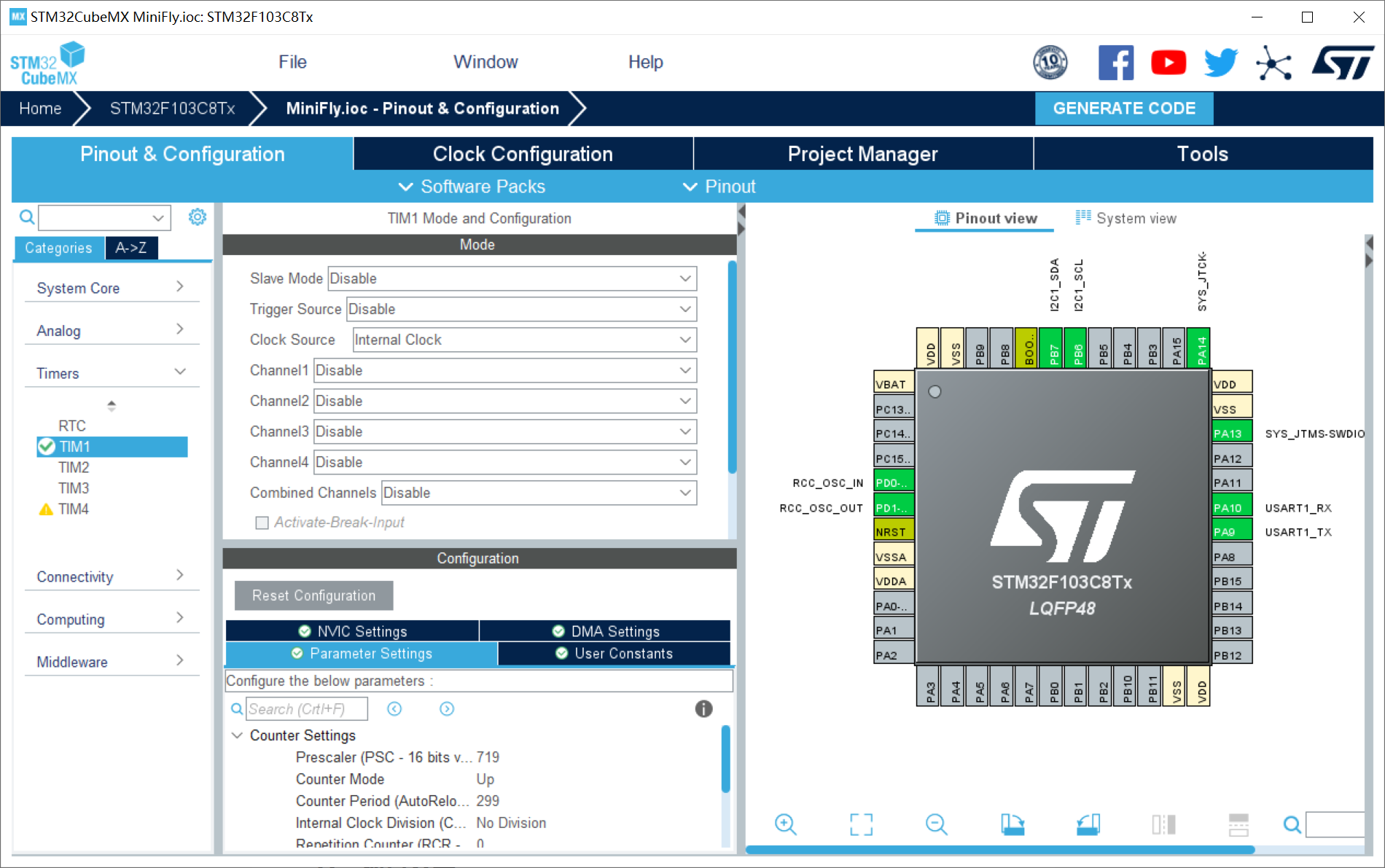
3、tim1配置:在tim1的中断回调函数中发生mpu6050姿态解算与控制都是,中断周期:3ms;
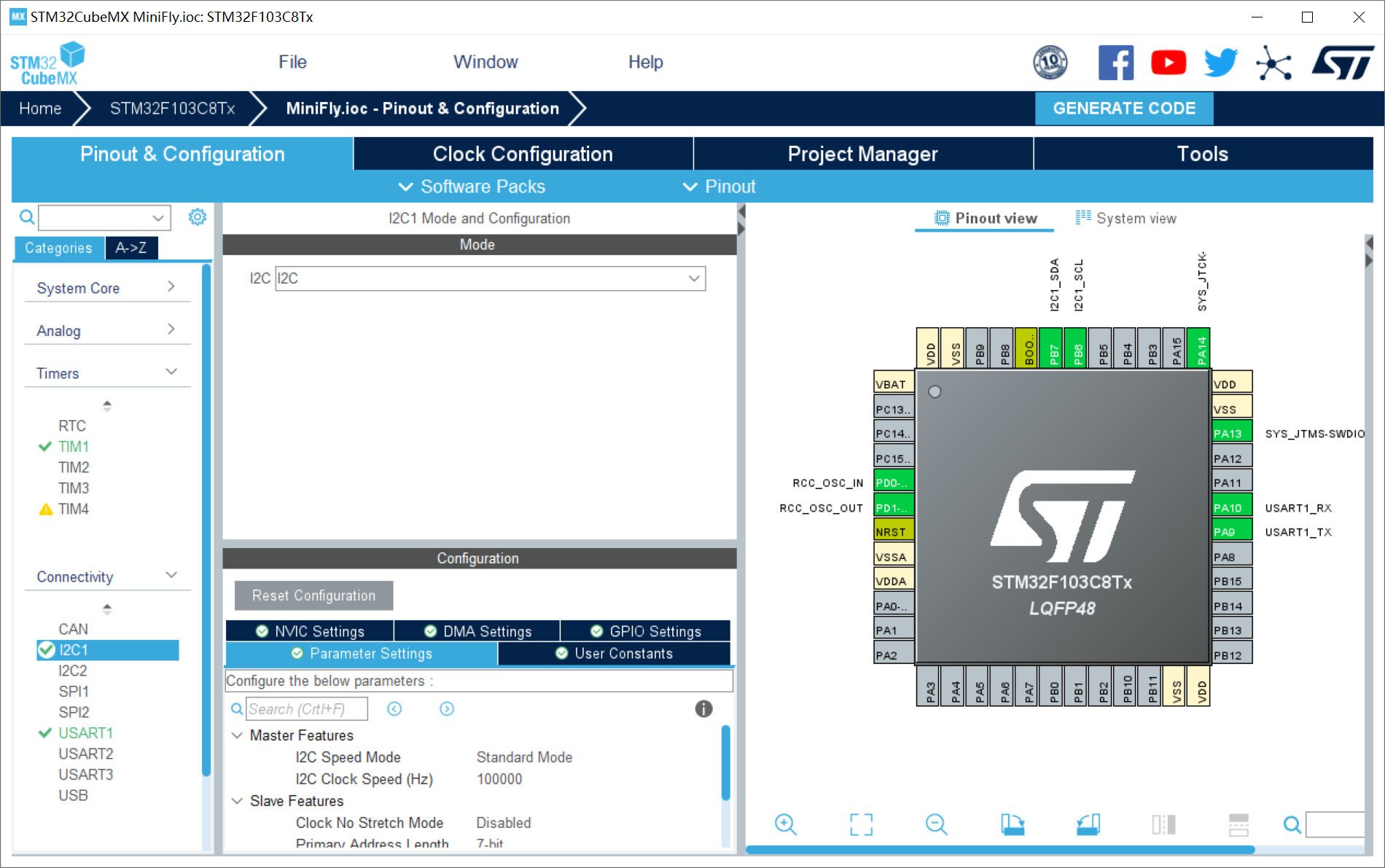
4、i2c1配置:配置mcu与mpu6050之间的通讯协议;
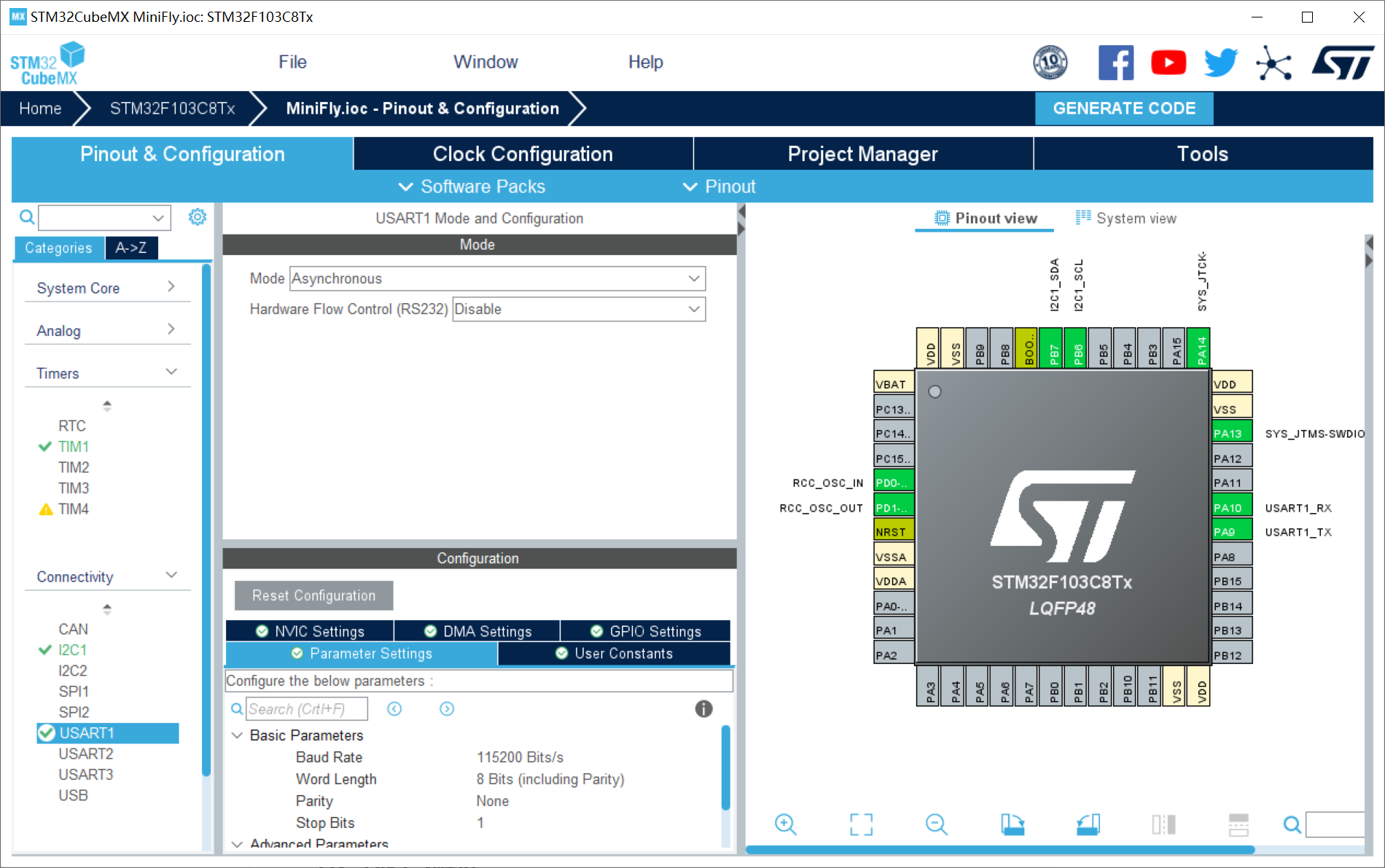
5、uart配置:通过uart1与匿名上位机进行通讯,显示飞行器3d姿态;
6、时钟树配置
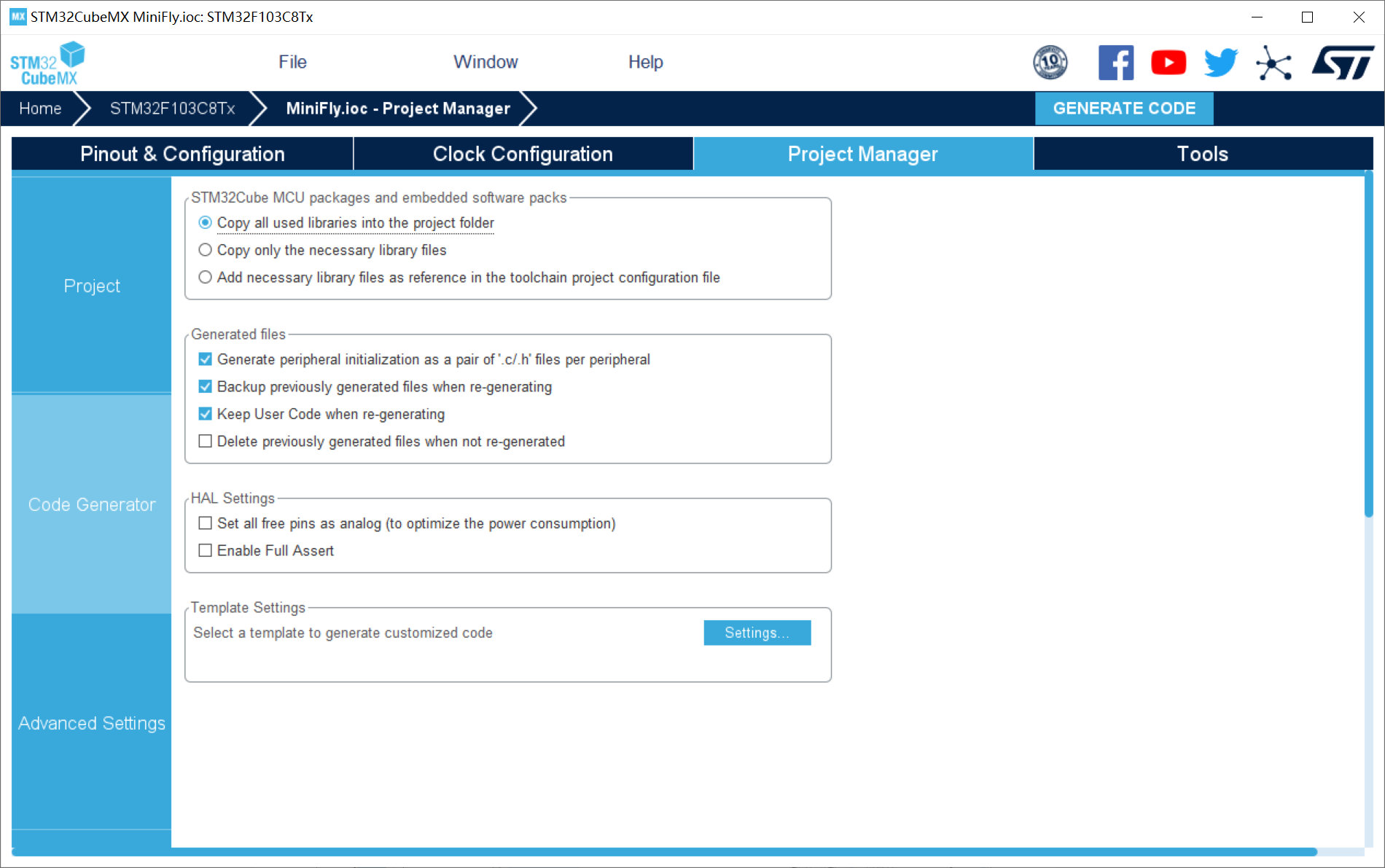
7、工程配置
四、代码与解析
4.1 mpu6050代码
mpu6050.h代码:
mpu6050代码中核心是通过i2c通讯读取寄存器地址为:0x3b 和 0x43 的数值(分别为角加速度和角速度)。
#ifndef __mpu6050_h
#define __mpu6050_h
#include "stm32f1xx_hal.h"//用什么系列就是什么
//#define mpu_accel_offs_reg 0x06 //accel_offs寄存器,可读取版本号,寄存器手册未提到
//#define mpu_prod_id_reg 0x0c //prod id寄存器,在寄存器手册未提到
#define mpu_self_testx_reg 0x0d //自检寄存器x
#define mpu_self_testy_reg 0x0e //自检寄存器y
#define mpu_self_testz_reg 0x0f //自检寄存器z
#define mpu_self_testa_reg 0x10 //自检寄存器a
#define mpu_sample_rate_reg 0x19 //采样频率分频器
#define mpu_cfg_reg 0x1a //配置寄存器
#define mpu_gyro_cfg_reg 0x1b //陀螺仪配置寄存器
#define mpu_accel_cfg_reg 0x1c //加速度计配置寄存器
#define mpu_motion_det_reg 0x1f //运动检测阀值设置寄存器
#define mpu_fifo_en_reg 0x23 //fifo使能寄存器
#define mpu_i2cmst_ctrl_reg 0x24 //iic主机控制寄存器
#define mpu_i2cslv0_addr_reg 0x25 //iic从机0器件地址寄存器
#define mpu_i2cslv0_reg 0x26 //iic从机0数据地址寄存器
#define mpu_i2cslv0_ctrl_reg 0x27 //iic从机0控制寄存器
#define mpu_i2cslv1_addr_reg 0x28 //iic从机1器件地址寄存器
#define mpu_i2cslv1_reg 0x29 //iic从机1数据地址寄存器
#define mpu_i2cslv1_ctrl_reg 0x2a //iic从机1控制寄存器
#define mpu_i2cslv2_addr_reg 0x2b //iic从机2器件地址寄存器
#define mpu_i2cslv2_reg 0x2c //iic从机2数据地址寄存器
#define mpu_i2cslv2_ctrl_reg 0x2d //iic从机2控制寄存器
#define mpu_i2cslv3_addr_reg 0x2e //iic从机3器件地址寄存器
#define mpu_i2cslv3_reg 0x2f //iic从机3数据地址寄存器
#define mpu_i2cslv3_ctrl_reg 0x30 //iic从机3控制寄存器
#define mpu_i2cslv4_addr_reg 0x31 //iic从机4器件地址寄存器
#define mpu_i2cslv4_reg 0x32 //iic从机4数据地址寄存器
#define mpu_i2cslv4_do_reg 0x33 //iic从机4写数据寄存器
#define mpu_i2cslv4_ctrl_reg 0x34 //iic从机4控制寄存器
#define mpu_i2cslv4_di_reg 0x35 //iic从机4读数据寄存器
#define mpu_i2cmst_sta_reg 0x36 //iic主机状态寄存器
#define mpu_intbp_cfg_reg 0x37 //中断/旁路设置寄存器
#define mpu_int_en_reg 0x38 //中断使能寄存器
#define mpu_int_sta_reg 0x3a //中断状态寄存器
#define mpu_accel_xouth_reg 0x3b //加速度值,x轴高8位寄存器
#define mpu_accel_xoutl_reg 0x3c //加速度值,x轴低8位寄存器
#define mpu_accel_youth_reg 0x3d //加速度值,y轴高8位寄存器
#define mpu_accel_youtl_reg 0x3e //加速度值,y轴低8位寄存器
#define mpu_accel_zouth_reg 0x3f //加速度值,z轴高8位寄存器
#define mpu_accel_zoutl_reg 0x40 //加速度值,z轴低8位寄存器
#define mpu_temp_outh_reg 0x41 //温度值高八位寄存器
#define mpu_temp_outl_reg 0x42 //温度值低8位寄存器
#define mpu_gyro_xouth_reg 0x43 //陀螺仪值,x轴高8位寄存器
#define mpu_gyro_xoutl_reg 0x44 //陀螺仪值,x轴低8位寄存器
#define mpu_gyro_youth_reg 0x45 //陀螺仪值,y轴高8位寄存器
#define mpu_gyro_youtl_reg 0x46 //陀螺仪值,y轴低8位寄存器
#define mpu_gyro_zouth_reg 0x47 //陀螺仪值,z轴高8位寄存器
#define mpu_gyro_zoutl_reg 0x48 //陀螺仪值,z轴低8位寄存器
#define mpu_i2cslv0_do_reg 0x63 //iic从机0数据寄存器
#define mpu_i2cslv1_do_reg 0x64 //iic从机1数据寄存器
#define mpu_i2cslv2_do_reg 0x65 //iic从机2数据寄存器
#define mpu_i2cslv3_do_reg 0x66 //iic从机3数据寄存器
#define mpu_i2cmst_delay_reg 0x67 //iic主机延时管理寄存器
#define mpu_sigpath_rst_reg 0x68 //信号通道复位寄存器
#define mpu_mdetect_ctrl_reg 0x69 //运动检测控制寄存器
#define mpu_user_ctrl_reg 0x6a //用户控制寄存器
#define mpu_pwr_mgmt1_reg 0x6b //电源管理寄存器1
#define mpu_pwr_mgmt2_reg 0x6c //电源管理寄存器2
#define mpu_fifo_cnth_reg 0x72 //fifo计数寄存器高八位
#define mpu_fifo_cntl_reg 0x73 //fifo计数寄存器低八位
#define mpu_fifo_rw_reg 0x74 //fifo读写寄存器
#define mpu_device_id_reg 0x75 //器件id寄存器,who am i寄存器
//如果ad0脚(9脚)接地,iic地址为0x68(不包含最低位).
//如果接v3.3,则iic地址为0x69(不包含最低位).
#define mpu_addr 0x68
//因为mpu6050的ad0接gnd,所以则读写地址分别为0xd1和0xd0
// (如果ad0接vcc,则读写地址分别为0xd3和0xd2)
#define mpu_read 0xd1
#define mpu_write 0xd0
uint8_t mpu_init(void); //初始化mpu6050
uint8_t mpu_write_len(uint8_t reg,uint8_t len,uint8_t *buf); //iic连续写
uint8_t mpu_read_len(uint8_t reg,uint8_t len,uint8_t *buf); //iic连续读
uint8_t mpu_write_byte(uint8_t reg,uint8_t data); //iic写一个字节
uint8_t mpu_read_byte(uint8_t reg); //iic读一个字节
uint8_t mpu_set_gyro_fsr(uint8_t fsr);
uint8_t mpu_set_accel_fsr(uint8_t fsr);
uint8_t mpu_set_lpf(uint16_t lpf);
uint8_t mpu_set_rate(uint16_t rate);
uint8_t mpu_set_fifo(uint8_t sens);
float mpu_get_temperature(void);
uint8_t mpu_get_gyroscope(short *gx,short *gy,short *gz);
uint8_t mpu_get_accelerometer(short *ax,short *ay,short *az);
void mpugetdata(void);
#endifmpu6050.c代码:
#include "mpu6050.h"
#include "alldata.h"
#include "kalman.h"
#include "stdio.h"
#include "i2c.h"
static volatile int16_t *pmpu = (int16_t *)&mpu6050;
int16_t mpuoffset[6] = {0}; //mpu6050补偿数值
//初始化mpu6050
//返回值:0,成功
// 其他,错误代码
uint8_t mpu_init(void)
{
uint8_t res;
extern i2c_handletypedef hi2c1;
hal_i2c_init(&hi2c1);
mpu_write_byte(mpu_pwr_mgmt1_reg,0x80); //复位mpu6050
mpu_write_byte(mpu_pwr_mgmt1_reg,0x00); //唤醒mpu6050
mpu_set_gyro_fsr(3); //陀螺仪传感器,±2000dps
mpu_set_accel_fsr(0); //加速度传感器,±2g
mpu_set_rate(50); //设置采样率50hz
mpu_write_byte(mpu_int_en_reg,0x00); //关闭所有中断
mpu_write_byte(mpu_user_ctrl_reg,0x00); //i2c主模式关闭
mpu_write_byte(mpu_fifo_en_reg,0x00); //关闭fifo
mpu_write_byte(mpu_intbp_cfg_reg,0x80); //int引脚低电平有效
res=mpu_read_byte(mpu_device_id_reg);
printf("\r\nmpu6050:0x%2x\r\n",res);
if(res==mpu_addr)//器件id正确
{
mpu_write_byte(mpu_pwr_mgmt1_reg,0x01); //设置clksel,pll x轴为参考
mpu_write_byte(mpu_pwr_mgmt2_reg,0x00); //加速度与陀螺仪都工作
mpu_set_rate(50); //设置采样率为50hz
}else
return 1;
return 0;
}
//设置mpu6050陀螺仪传感器满量程范围
//fsr:0,±250dps;1,±500dps;2,±1000dps;3,±2000dps
//返回值:0,设置成功
// 其他,设置失败
uint8_t mpu_set_gyro_fsr(uint8_t fsr)
{
return mpu_write_byte(mpu_gyro_cfg_reg,fsr<<3);//设置陀螺仪满量程范围
}
//设置mpu6050加速度传感器满量程范围
//fsr:0,±2g;1,±4g;2,±8g;3,±16g
//返回值:0,设置成功
// 其他,设置失败
uint8_t mpu_set_accel_fsr(uint8_t fsr)
{
return mpu_write_byte(mpu_accel_cfg_reg,fsr<<3);//设置加速度传感器满量程范围
}
//设置mpu6050的数字低通滤波器
//lpf:数字低通滤波频率(hz)
//返回值:0,设置成功
// 其他,设置失败
uint8_t mpu_set_lpf(uint16_t lpf)
{
uint8_t data=0;
if(lpf>=188)data=1;
else if(lpf>=98)data=2;
else if(lpf>=42)data=3;
else if(lpf>=20)data=4;
else if(lpf>=10)data=5;
else data=6;
return mpu_write_byte(mpu_cfg_reg,data);//设置数字低通滤波器
}
//设置mpu6050的采样率(假定fs=1khz)
//rate:4~1000(hz)
//返回值:0,设置成功
// 其他,设置失败
uint8_t mpu_set_rate(uint16_t rate)
{
uint8_t data;
if(rate>1000)rate=1000;
if(rate<4)rate=4;
data=1000/rate-1;
data=mpu_write_byte(mpu_sample_rate_reg,data); //设置数字低通滤波器
return mpu_set_lpf(rate/2); //自动设置lpf为采样率的一半
}
//得到温度值
//返回值:温度值(扩大了100倍)
float mpu_get_temperature(void)
{
unsigned char buf[2];
short raw;
float temp;
mpu_read_len(mpu_temp_outh_reg,2,buf);
raw=(buf[0]<<8)| buf[1];
temp=(36.53+((double)raw)/340)*100;
// temp = (long)((35 + (raw / 340)) * 65536l);
return temp/100.0f;
}
//得到陀螺仪值(原始值)
//gx,gy,gz:陀螺仪x,y,z轴的原始读数(带符号)
//返回值:0,成功
// 其他,错误代码
uint8_t mpu_get_gyroscope(short *gx,short *gy,short *gz)
{
uint8_t buf[6],res;
res=mpu_read_len(mpu_gyro_xouth_reg,6,buf);
if(res==0)
{
*gx=((uint16_t)buf[0]<<8)|buf[1];
*gy=((uint16_t)buf[2]<<8)|buf[3];
*gz=((uint16_t)buf[4]<<8)|buf[5];
}
return res;
}
//得到加速度值(原始值)
//gx,gy,gz:陀螺仪x,y,z轴的原始读数(带符号)
//返回值:0,成功
// 其他,错误代码
uint8_t mpu_get_accelerometer(short *ax,short *ay,short *az)
{
uint8_t buf[6],res;
res=mpu_read_len(mpu_accel_xouth_reg,6,buf);
if(res==0)
{
*ax=((uint16_t)buf[0]<<8)|buf[1];
*ay=((uint16_t)buf[2]<<8)|buf[3];
*az=((uint16_t)buf[4]<<8)|buf[5];
}
return res;;
}
//iic连续写
uint8_t mpu_write_len(uint8_t reg,uint8_t len,uint8_t *buf)
{
extern i2c_handletypedef hi2c1;
hal_i2c_mem_write(&hi2c1, mpu_write, reg, i2c_memadd_size_8bit, buf, len, 0xfff);
hal_delay(100);
return 0;
}
//iic连续读
//addr:器件地址
//reg:要读取的寄存器地址
//len:要读取的长度
//buf:读取到的数据存储区
//返回值:0,正常
// 其他,错误代码
uint8_t mpu_read_len(uint8_t reg,uint8_t len,uint8_t *buf)
{
extern i2c_handletypedef hi2c1;
hal_i2c_mem_read(&hi2c1, mpu_read, reg, i2c_memadd_size_8bit, buf, len, 0xfff);
hal_delay(100);
return 0;
}
//iic写一个字节
//reg:寄存器地址
//data:数据
//返回值:0,正常
// 其他,错误代码
uint8_t mpu_write_byte(uint8_t reg,uint8_t data)
{
extern i2c_handletypedef hi2c1;
unsigned char w_data=0;
w_data = data;
hal_i2c_mem_write(&hi2c1, mpu_write, reg, i2c_memadd_size_8bit, &w_data, 1, 0xfff);
hal_delay(100);
return 0;
}
//iic读一个字节
//reg:寄存器地址
//返回值:读到的数据
uint8_t mpu_read_byte(uint8_t reg)
{
extern i2c_handletypedef hi2c1;
unsigned char r_data=0;
hal_i2c_mem_read(&hi2c1, mpu_read, reg, i2c_memadd_size_8bit, &r_data, 1, 0xfff);
hal_delay(100);
return r_data;
}
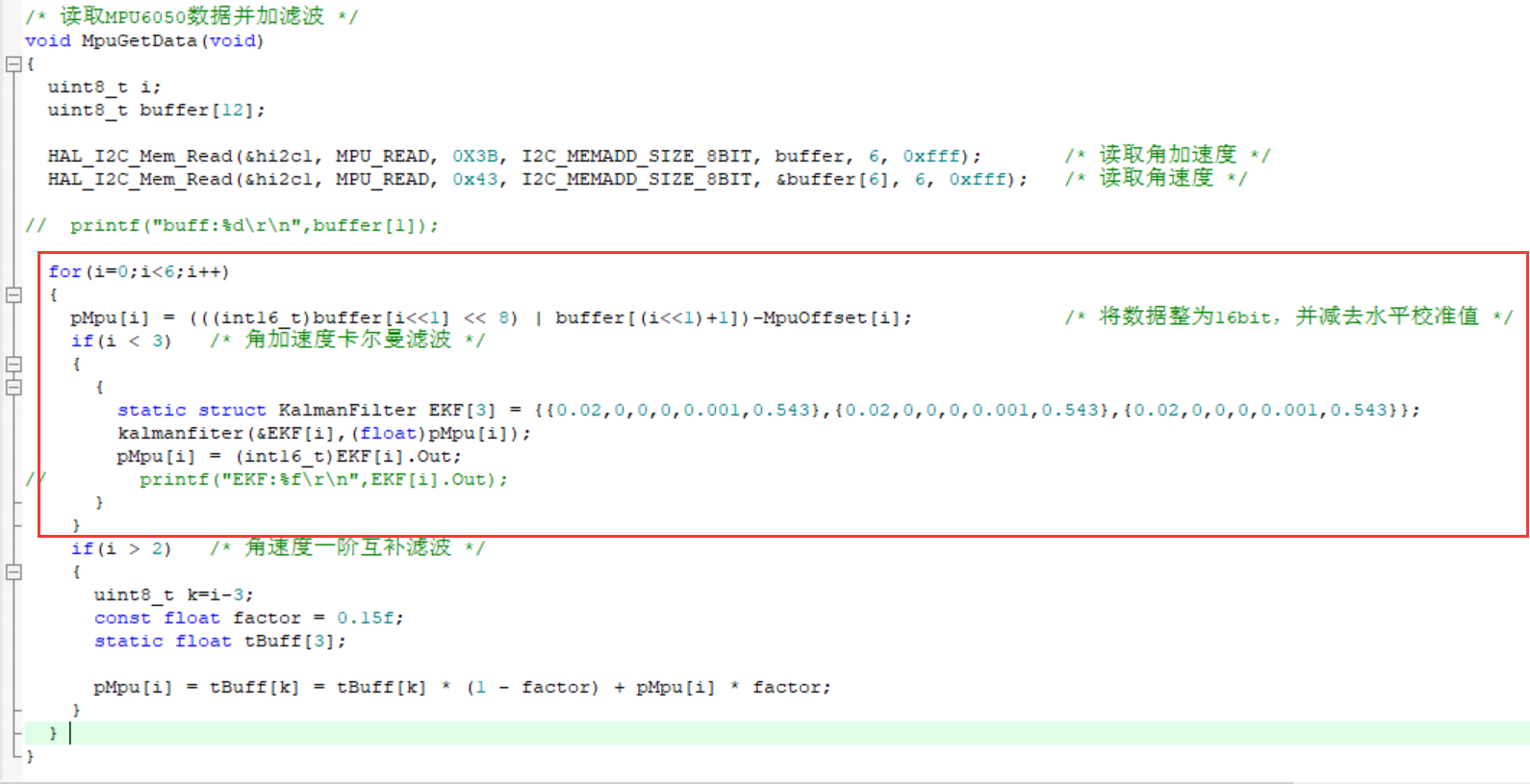
/* 读取mpu6050数据并加滤波 */
void mpugetdata(void)
{
uint8_t i;
uint8_t buffer[12];
hal_i2c_mem_read(&hi2c1, mpu_read, 0x3b, i2c_memadd_size_8bit, buffer, 6, 0xfff); /* 读取角加速度 */
hal_i2c_mem_read(&hi2c1, mpu_read, 0x43, i2c_memadd_size_8bit, &buffer[6], 6, 0xfff); /* 读取角速度 */
for(i=0;i<6;i++)
{
pmpu[i] = (((int16_t)buffer[i<<1] << 8) | buffer[(i<<1)+1])-mpuoffset[i]; /* 将数据整为16bit,并减去水平校准值 */
if(i < 3) /* 角加速度卡尔曼滤波 */
{
{
static struct kalmanfilter ekf[3] = {{0.02,0,0,0,0.001,0.543},{0.02,0,0,0,0.001,0.543},{0.02,0,0,0,0.001,0.543}};
kalmanfiter(&ekf[i],(float)pmpu[i]);
pmpu[i] = (int16_t)ekf[i].out;
}
}
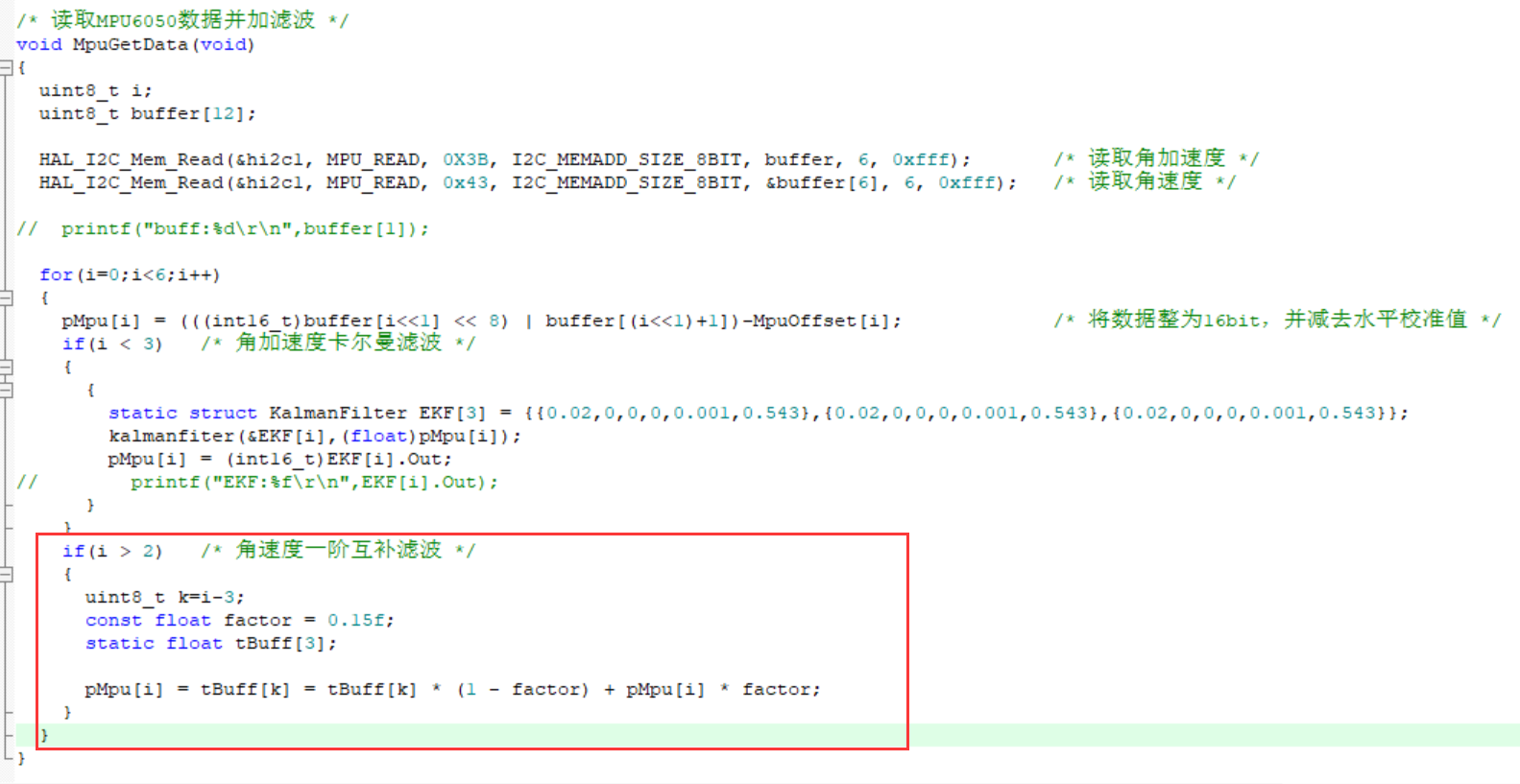
if(i > 2) /* 角速度一阶互补滤波 */
{
uint8_t k=i-3;
const float factor = 0.15f;
static float tbuff[3];
pmpu[i] = tbuff[k] = tbuff[k] * (1 - factor) + pmpu[i] * factor;
}
}
}4.2 kalman和一阶互补滤波滤波代码
kalman.c:
#include "kalman.h"
//一维卡尔曼滤波
void kalmanfiter(struct kalmanfilter *ekf,float input)
{
ekf->newp = ekf->lastp + ekf->q;
ekf->kg = ekf->newp / (ekf->newp + ekf->r);
ekf->out = ekf->out + ekf->kg * (input - ekf->out);
ekf->lastp = (1 - ekf->kg) * ekf->newp;
}一阶互补滤波:
if(i > 2) /* 角速度一阶互补滤波 */
{
uint8_t k=i-3;
const float factor = 0.15f; /* 互补滤波的影响因子 */
static float tbuff[3];
pmpu[i] = tbuff[k] = tbuff[k] * (1 - factor) + pmpu[i] * factor;
}以上 2 种滤波都存在 mpu6050.c 代码中进行调用:
这个适当取 p = 0.02 默认初始第一比数据的协方差不为 0,也就是不承认第一笔数据完全准确。取 q=0.001,就是认为测量方差的过程噪声比较小,实际上多小也没人知道,随便给个值优化输出。而 r 比较大,默认噪声都是信号采集就已经产生的了(xyz 三轴加速度都是一个样,所以参数相同 )。
现在来介绍一下角速度的滤波。由于角速度不容易受干扰,又需要保持最快速度反应。只要稍微适当给个滤波去除白噪声。本次采用一阶低通滤波。
4.3 imu代码(姿态解算)
这部分代码其实就是第一章节的四元数姿态求解,具体推导过程和代码思路参考上文,还是建议大家多花点时间消化消化。
imu.h:
#ifndef __imu_h
#define __imu_h
#include "alldata.h"
#define squa( sq ) (((float)sq)*((float)sq))
extern void getangle(const _st_mpu *pmpu,_st_ange *pange, float dt);
extern void imu_rest(void);
#endifimu.c:
#include "imu.h"
#include "mpu6050.h"
#include <math.h>
const float m_pi = 3.1415926535;
const float rta = 57.2957795f;
const float atr = 0.0174532925f;
const float gyro_g = 0.03051756f*2; //陀螺仪初始化量程+-2000度每秒于1 / (65536 / 4000) = 0.03051756*2
const float gyro_gr = 0.0005326f*2; //面计算度每秒,转换弧度每秒则 2*0.03051756 * 0.0174533f = 0.0005326*2
static float normacc;
/* 四元数系数 */
typedef volatile struct {
float q0;
float q1;
float q2;
float q3;
} quaternion;
quaternion numq = {1, 0, 0, 0};
/* 陀螺仪积分误差 */
struct v{
float x;
float y;
float z;
};
volatile struct v gyrointegerror = {0};
/* 四元数解法初始化 */
void imu_rest(void)
{
numq.q0 =1;
numq.q1 = 0;
numq.q2 = 0;
numq.q3 = 0;
gyrointegerror.x = 0;
gyrointegerror.y = 0;
gyrointegerror.z = 0;
angle.pitch = 0;
angle.roll = 0;
}
void getangle(const _st_mpu *pmpu,_st_ange *pange, float dt)
{
volatile struct v gravity,acc,gyro,accgravity;
static float kpdef = 0.5f ;
static float kidef = 0.0001f;
//static float kidef = 0.00001f;
float q0_t,q1_t,q2_t,q3_t;
//float normacc;
float normquat;
float halftime = dt * 0.5f;
//提取等效旋转矩阵中的重力分量
gravity.x = 2*(numq.q1 * numq.q3 - numq.q0 * numq.q2);
gravity.y = 2*(numq.q0 * numq.q1 + numq.q2 * numq.q3);
gravity.z = 1-2*(numq.q1 * numq.q1 + numq.q2 * numq.q2);
// 加速度归一化
//printf("accx:%d\r\n",mpu6050.accx);
normacc = 1/sqrt(squa(mpu6050.accx)+ squa(mpu6050.accy) +squa(mpu6050.accz));
//printf("noracc%f\r\n",normacc);
// normacc = q_rsqrt(squa(mpu6050.accx)+ squa(mpu6050.accy) +squa(mpu6050.accz));
acc.x = pmpu->accx * normacc;
acc.y = pmpu->accy * normacc;
acc.z = pmpu->accz * normacc;
//向量差乘得出的值
accgravity.x = (acc.y * gravity.z - acc.z * gravity.y);
accgravity.y = (acc.z * gravity.x - acc.x * gravity.z);
accgravity.z = (acc.x * gravity.y - acc.y * gravity.x);
//再做加速度积分补偿角速度的补偿值
gyrointegerror.x += accgravity.x * kidef;
gyrointegerror.y += accgravity.y * kidef;
gyrointegerror.z += accgravity.z * kidef;
//角速度融合加速度积分补偿值
gyro.x = pmpu->gyrox * gyro_gr + kpdef * accgravity.x + gyrointegerror.x;//弧度制
gyro.y = pmpu->gyroy * gyro_gr + kpdef * accgravity.y + gyrointegerror.y;
gyro.z = pmpu->gyroz * gyro_gr + kpdef * accgravity.z + gyrointegerror.z;
// 一阶龙格库塔法, 更新四元数
q0_t = (-numq.q1*gyro.x - numq.q2*gyro.y - numq.q3*gyro.z) * halftime;
q1_t = ( numq.q0*gyro.x - numq.q3*gyro.y + numq.q2*gyro.z) * halftime;
q2_t = ( numq.q3*gyro.x + numq.q0*gyro.y - numq.q1*gyro.z) * halftime;
q3_t = (-numq.q2*gyro.x + numq.q1*gyro.y + numq.q0*gyro.z) * halftime;
numq.q0 += q0_t;
numq.q1 += q1_t;
numq.q2 += q2_t;
numq.q3 += q3_t;
// 四元数归一化
normquat = 1/sqrt(squa(numq.q0) + squa(numq.q1) + squa(numq.q2) + squa(numq.q3));
numq.q0 *= normquat;
numq.q1 *= normquat;
numq.q2 *= normquat;
numq.q3 *= normquat;
// 四元数转欧拉角
{
#ifdef yaw_gyro
*(
float *)pange = atan2f(2 * numq.q1 *numq.q2 + 2 * numq.q0 * numq.q3, 1 - 2 * numq.q2 *numq.q2 - 2 * numq.q3 * numq.q3) * rta; //yaw
#else
float yaw_g = pmpu->gyroz * gyro_g;
if((yaw_g > 1.0f) || (yaw_g < -1.0f)) //数据太小可以认为是干扰,不是偏航动作
{
pange->yaw += yaw_g * dt;
printf("yaw:%f\r\n",pange->yaw);
}
#endif
pange->pitch = asin(2 * numq.q0 *numq.q2 - 2 * numq.q1 * numq.q3) * rta;
pange->roll = atan2(2 * numq.q2 *numq.q3 + 2 * numq.q0 * numq.q1, 1 - 2 * numq.q1 *numq.q1 - 2 * numq.q2 * numq.q2) * rta; //pitch
printf("pitch:%f;\r\n",pange->pitch);
printf("roll:%f;\r\n",pange->roll);
}
}4.4 main函数
该阶段下的 main 函数为 while 空循环,mpu6050 读取和解算欧拉角都在 tim1 的中断回调函数中进行,代码如下:
void hal_tim_periodelapsedcallback(tim_handletypedef *htim)
{
if (htim == (&htim1)) //如果定时器tim1中断发生
{
mpugetdata();
getangle(&mpu6050,&angle,0.003f);
send_anotc();
}
}五、匿名上位机3d姿态显示
5.1 匿名上位机概述
匿名上位机为匿名科创团队自主设计的知名上位机,通常用于与无人机或飞行器进行通信和数据传输。它可以通过串口、蓝牙、wi-fi和usb等通信方式与无人机连接,并可以实时接收和显示来自无人机的数据,如传感器数据、gps定位信息、飞行控制指令等。此外,匿名上位机还可以进行数据存储、分析和可视化3d模型,方便用户对无人机数据进行处理和分析(作者本次仅为大家提供串口协议下的可视化3d姿态代码)。

匿名科创官网:welcome [匿名科创] (anotc.com)
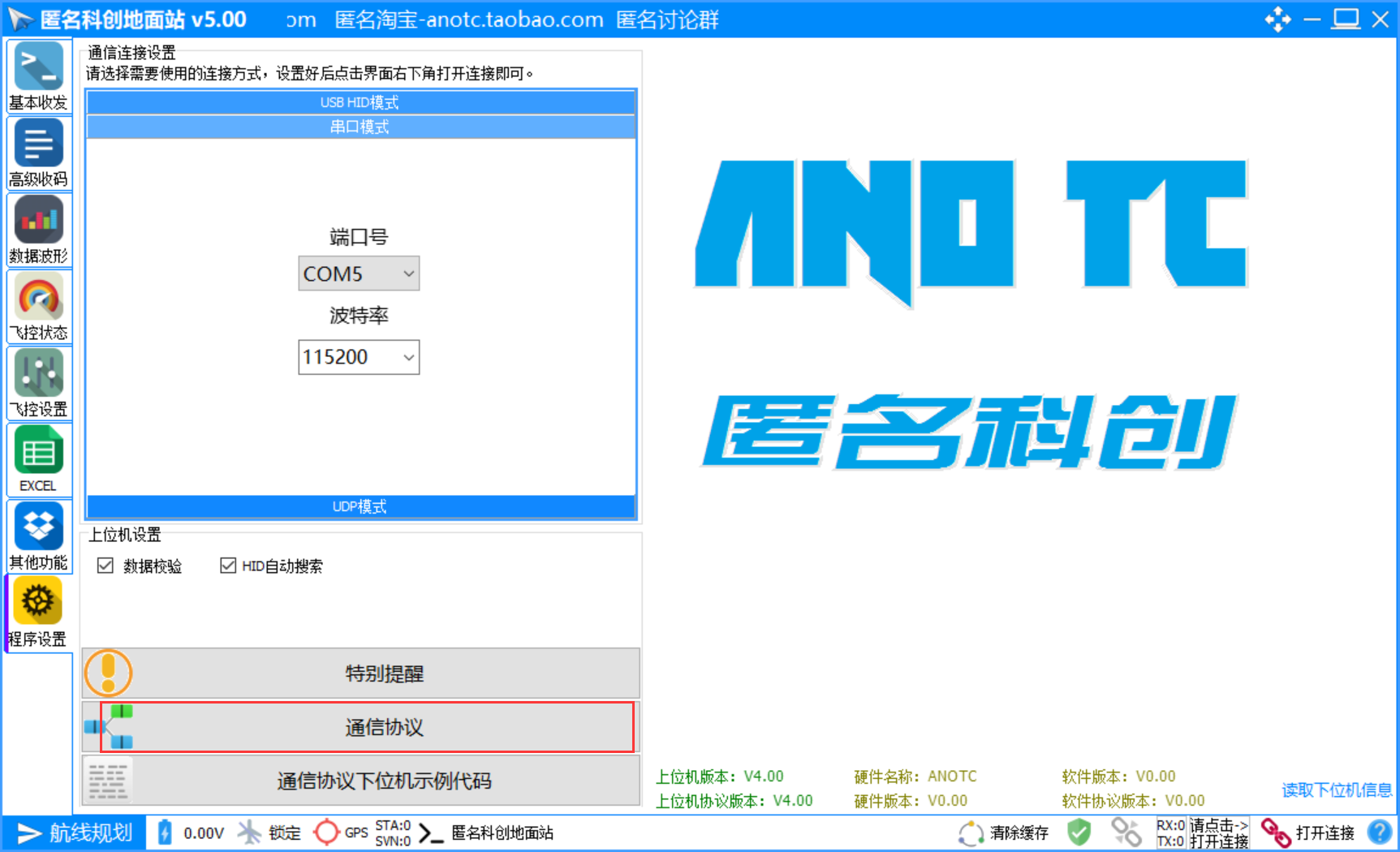
5.2 匿名上位机通讯
匿名科创上位机为使用者提供了详细的通讯协议资料,点击左边程序设置图标,点击红框所示的通信协议。
匿名上位机提供了很多数据传输协议模板,此时飞控项目我们仅考虑飞机姿态的基本信息,从wps的表格中找到如下信息:
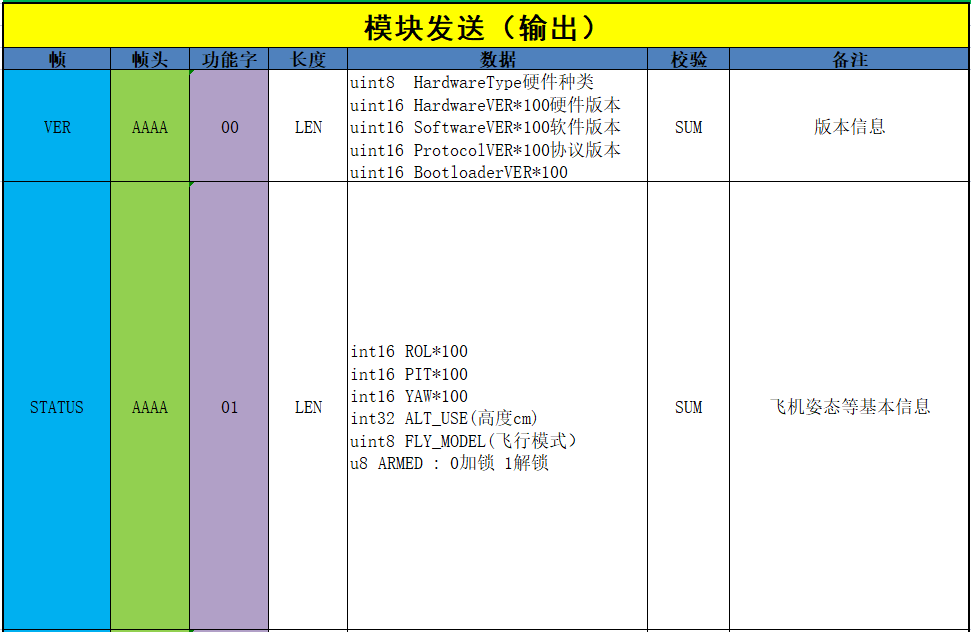
通过上图可以清晰的发现,匿名上位机的通讯是使用数据帧格式的(即存在规定格式的数据格式)。接下来作者帮大家解析一下status帧下的数据格式(飞机姿态信息帧)。
为了方便读者朋友对数据格式的解读,作者这里将匿名上位机的数据帧分为4部分:
第一部分:帧头“aaaa”,匿名上位机每次接受数据都需要“aaaa”格式的帧头打前阵;
第二部分:功能字+长度部分,status帧下的功能字为0x01;▲协议中长度字节len表示该数据帧内包含数据的字节总长度,不包括帧头、功能字、长度字节和最后的校验位,只是数据的字节长度和。比如该帧数据内容为3个int16型数据,那么len等于6,一个字节(8位)算一个长度。故status帧下的数据长度为:2+2+2+4+1+1=12;
第三部分:核心数据部分,该部分为通讯协议中的核心部分。定义一个数组,写入:翻滚角roll*100,俯仰角pitch*100,偏航角yaw*100,0(为使用气压计),0(飞行模式),0(加锁);
第四部分:sum即校验位,▲sum等于从该数据帧第一字节开始,也就是帧头开始,至该帧数据的最后一字节所有字节的和,只保留低八位,高位舍去。当然,校验位sum并非必须的,你可以不写;
comm.c代码:
#include "comm.h"
#include "alldata.h"
#include "usart.h"
/* anotc匿名站通讯机制(串口版本) */
void send_anotc()
{
uint8_t i;
uint8_t len=0;
int16_t anto[12];
int8_t *pt = (int8_t*)(anto);
anto[2] = (int16_t)(angle.roll*100);
anto[3] = (int16_t)(angle.pitch*100);
anto[4] = -(int16_t)(angle.yaw*100);
anto[5] = 0;//没有高度数据
anto[6] = 0;//飞行模式
anto[7] = all_flag.unlock<<8;//解锁信息
len = 12; //数据长度
anto[0] = 0xaaaa; //帧头
anto[1] = len | 0x01<<8; //功能字+长度
pt[len+4] = (int8_t)(0xaa+0xaa);
pt[len+4] = (int8_t)(0xaa+0xaa);
for(i=2;i<len+4;i+=2) //a swap with b;
{
pt[i] ^= pt[i+1];
pt[i+1] ^= pt[i];
pt[i] ^= pt[i+1];
pt[len+4] += pt[i] + pt[i+1];
}
hal_uart_transmit(&huart1,pt,len+5,0xffff); //采用串口发送到匿名上位机
}5.3 匿名上位机使用
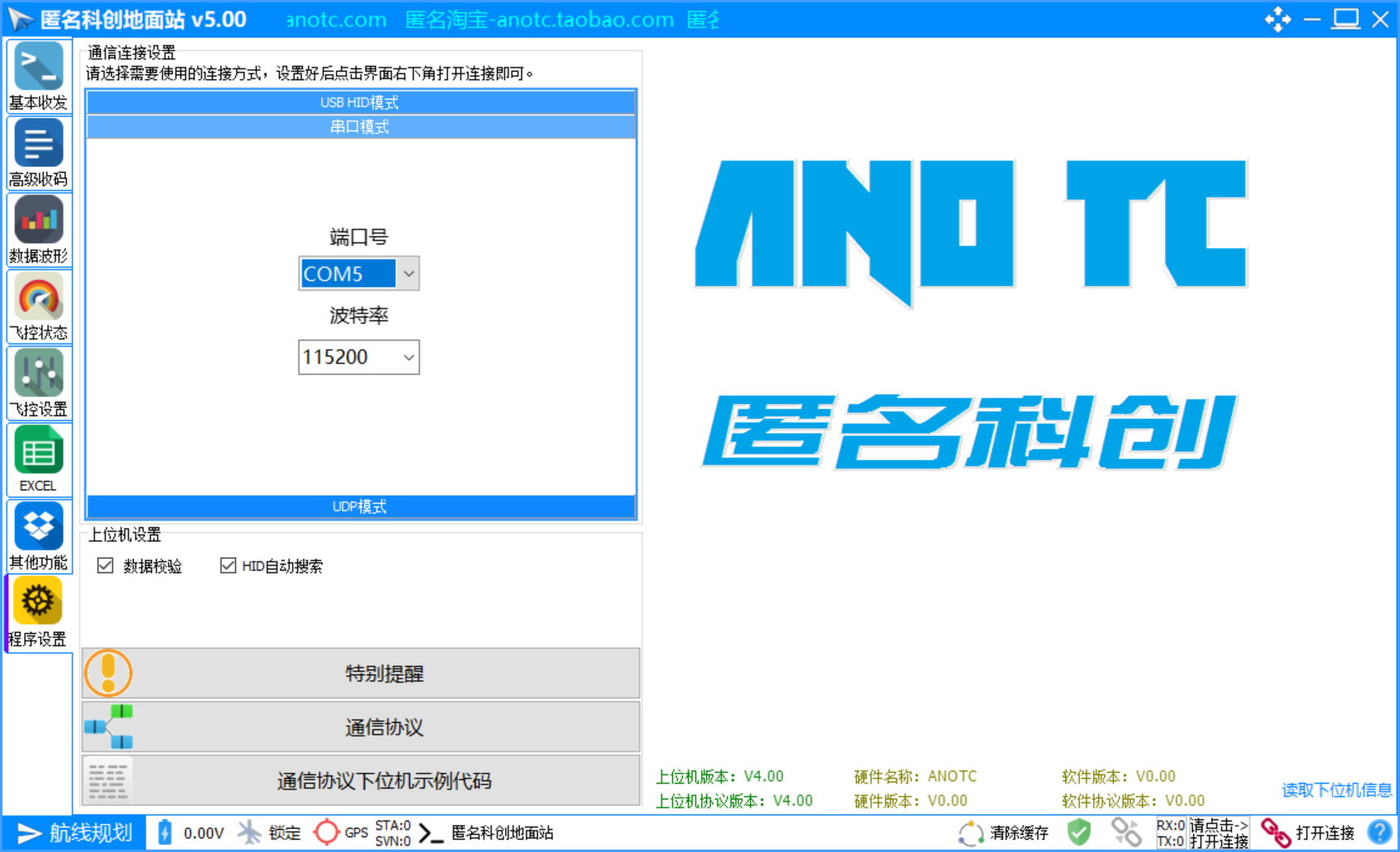
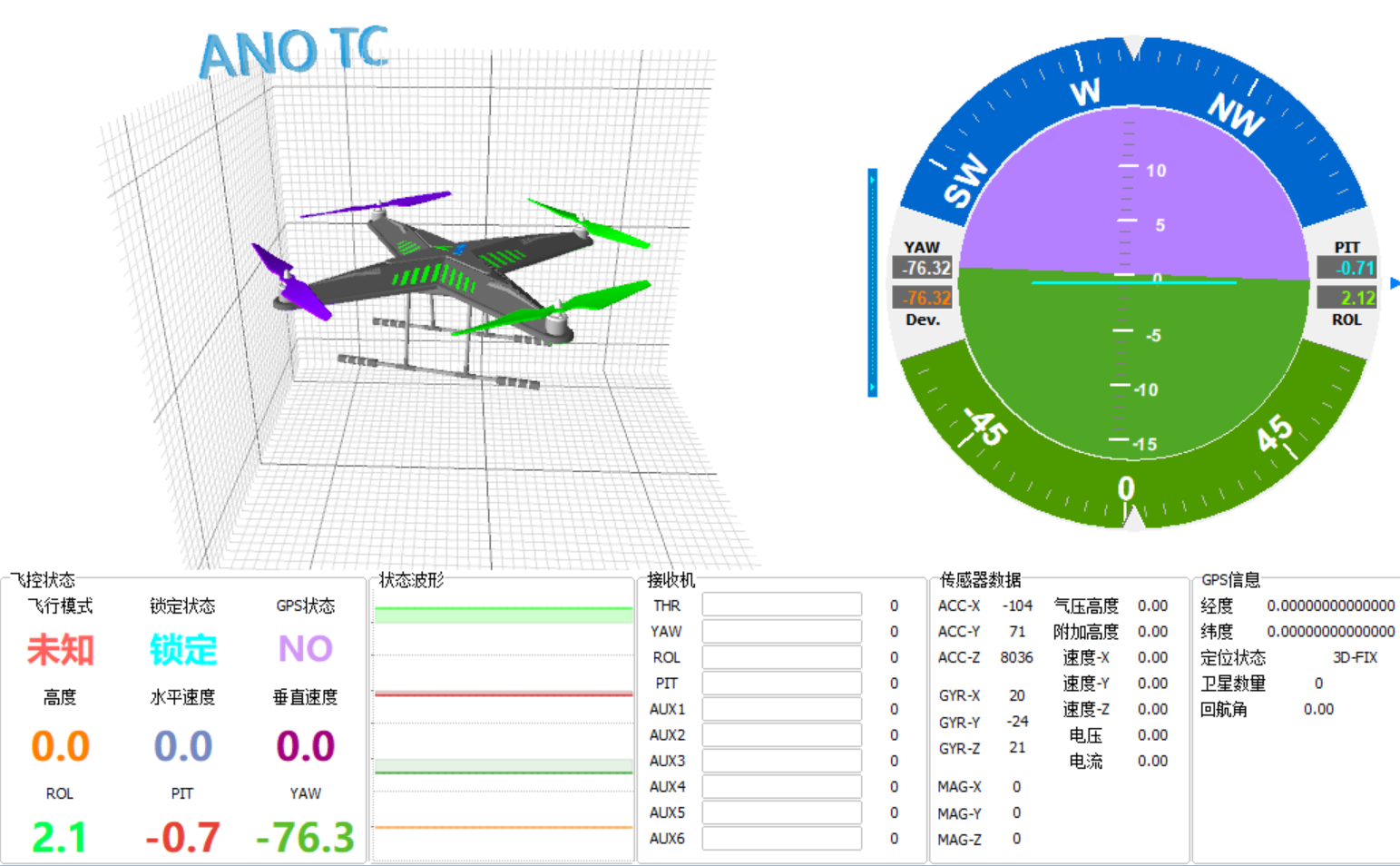
第一步:点击右下角打开连接;第二步:点击飞控状态图标;(作者没有写数据校验位故右下角警告可能出现警告,无视即可!)
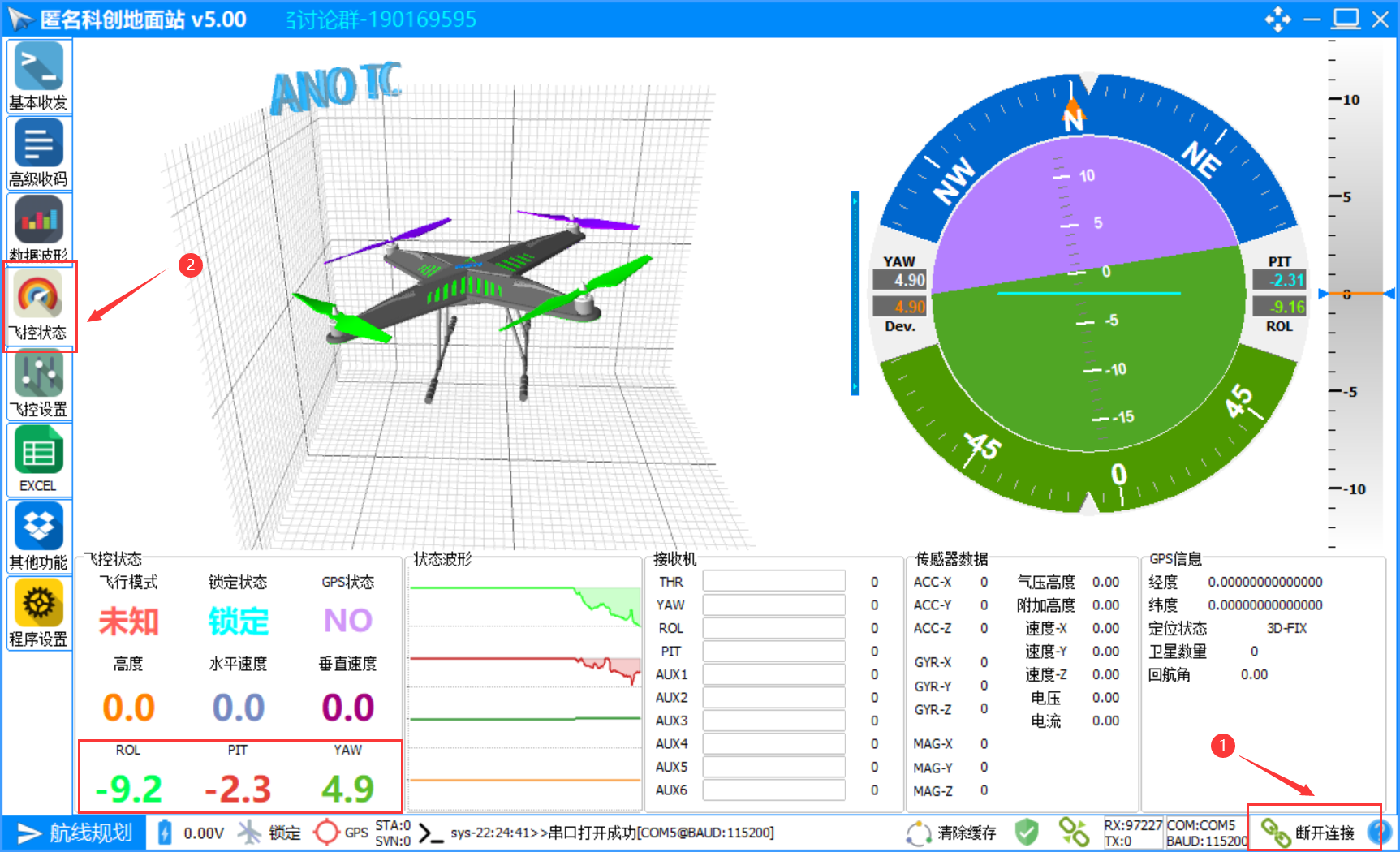
我们仅需要关注rol、rit、yaw和飞控状态即可,可以看出来匿名上位机的使用是非常简单!
六、项目效果
无人机3d姿态显示
七、项目代码
 https://download.csdn.net/download/black_sneak/87934739
https://download.csdn.net/download/black_sneak/87934739如果积分不够的朋友,点波关注,评论区留下邮箱,作者无偿提供源码和后续问题解答。求求啦关注一波吧 !!!

发表评论