💥1 概述
手指肌电图基于捏力的预测和分类 引言 本研究旨在构建一个肌电图识别系统,用于预测和分类不同手指之间的捏力,并为假肢设计中力量和手指运动的同步控制提供可行的方法。
人手的捏取动作是由拇指和其他四根手指完成的,包括来自两根手指或多根手指的运动。手捏力的强度和类别信息可以通过表面肌电图(semg)的模式识别来获得。本研究的目的是构建一个肌电图识别系统,以预测和分类不同手指之间的捏取力,并为假肢设计中力量和手指运动的同步控制提供可行的方法。
手指肌电图基于捏力的预测和分类是一项重要的研究课题。我们的研究旨在利用肌电图识别系统,通过分析不同手指之间的捏取力,为假肢设计中力量和手指运动的同步控制提供可行的方法。人手的捏取动作是由拇指和其他四根手指完成的,包括来自两根手指或多根手指的运动。因此,我们希望通过肌电图识别系统,能够准确预测和分类不同手指之间的捏取力的强度和类别信息。
表面肌电图(semg)是一种用于监测肌肉活动的非侵入式技术,通过检测肌肉电活动来获取肌肉收缩和放松的信息。利用这些信息,我们可以建立一个肌电图识别系统,通过模式识别来预测和分类不同手指之间的捏取力。这对于假肢设计和手指运动的控制非常重要,可以帮助假肢用户实现更加精准和自然的手指动作。
通过本研究,我们希望能够为假肢设计和手指运动控制领域提供新的方法和技术。我们将通过实验和数据分析,建立一个可靠的肌电图识别系统,为预测和分类不同手指之间的捏取力提供准确的信息。这将为假肢设计和手指运动控制领域带来重大的进展,为假肢用户提供更加舒适和自然的使用体验。我们相信,通过我们的努力,肌电图识别系统将成为未来假肢设计和手指运动控制的重要技术,为残疾人群体带来更多的帮助和便利。
📚2 运行结果
部分代码:
import csv
import matplotlib
import numpy as np
import operator
from pylab import *
import matplotlib.pyplot as plt
import matplotlib as mpl
def list_transpose(data):
data = list(map(list, zip(*data)))
return data
def loaddata(datafilename):
with open(datafilename, 'r') as csvfile:
lines = csv.reader(csvfile)
dataset = list(lines)
first_name = dataset[0]
dataset = dataset[1:]
x_line=size(dataset,0)
y_line=size(dataset,1)
i=0
while i<x_line:
j=0
while j<y_line:
dataset[i][j]=float(dataset[i][j])
j=j+1
i=i+1
csvfile.close()
return first_name, dataset
'''
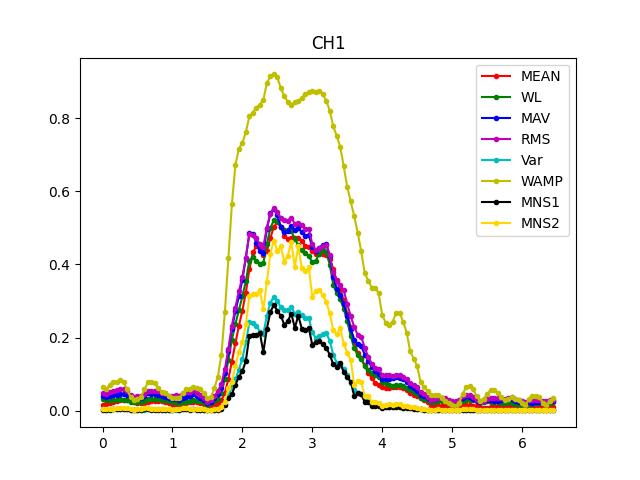
show the result of fig. 7.
'''
def main1():
first_name, dataset = loaddata('./data/function1data/data.csv')
feature_normalize = list_transpose(dataset)
t_second = np.array(range(len(feature_normalize[0]))) *0.05
figure(1)
plt.title('ch1')
feature_value = feature_normalize[0]
plt.plot(t_second, feature_value, 'r.-', label='mean')
feature_value = feature_normalize[1]
plt.plot(t_second, feature_value, 'g.-', label='wl')
feature_value = feature_normalize[2]
plt.plot(t_second, feature_value, 'b.-', label='mav')
feature_value = feature_normalize[3]
plt.plot(t_second, feature_value, 'm.-', label='rms')
feature_value = feature_normalize[4]
plt.plot(t_second, feature_value, 'c.-', label='var')
feature_value = feature_normalize[5]
plt.plot(t_second, feature_value, 'y.-', label='wamp')
feature_value = feature_normalize[6]
plt.plot(t_second, feature_value, 'k.-', label='mns1')
feature_value = feature_normalize[7]
plt.plot(t_second, feature_value, color='gold', linestyle='-', marker='.', label='mns2')
plt.legend(loc='upper right')
plt.savefig('./results/1.jpg')
plt.show()
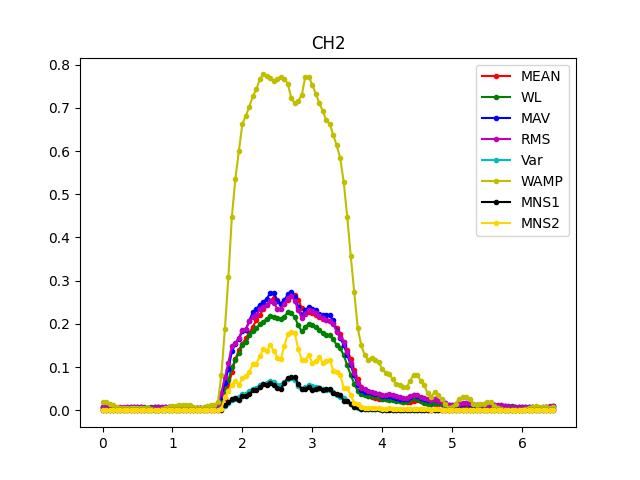
figure(2)
plt.title('ch2')
feature_value = feature_normalize[8]
plt.plot(t_second, feature_value, 'r.-', label='mean')
feature_value = feature_normalize[9]
plt.plot(t_second, feature_value, 'g.-', label='wl')
feature_value = feature_normalize[10]
plt.plot(t_second, feature_value, 'b.-', label='mav')
feature_value = feature_normalize[11]
plt.plot(t_second, feature_value, 'm.-', label='rms')
feature_value = feature_normalize[12]
plt.plot(t_second, feature_value, 'c.-', label='var')
feature_value = feature_normalize[13]
plt.plot(t_second, feature_value, 'y.-', label='wamp')
feature_value = feature_normalize[14]
plt.plot(t_second, feature_value, 'k.-', label='mns1')
feature_value = feature_normalize[15]
plt.plot(t_second, feature_value, color='gold', linestyle='-', marker='.', label='mns2')
plt.legend(loc='upper right')
plt.savefig('./results/2.jpg')
plt.show()
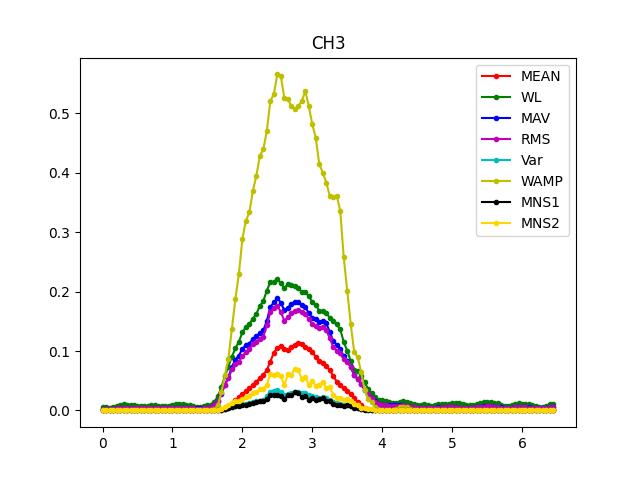
figure(3)
plt.title('ch3')
feature_value = feature_normalize[16]
plt.plot(t_second, feature_value, 'r.-', label='mean')
feature_value = feature_normalize[17]
plt.plot(t_second, feature_value, 'g.-', label='wl')
feature_value = feature_normalize[18]
plt.plot(t_second, feature_value, 'b.-', label='mav')
feature_value = feature_normalize[19]
plt.plot(t_second, feature_value, 'm.-', label='rms')
feature_value = feature_normalize[20]
plt.plot(t_second, feature_value, 'c.-', label='var')
feature_value = feature_normalize[21]
plt.plot(t_second, feature_value, 'y.-', label='wamp')
feature_value = feature_normalize[22]
plt.plot(t_second, feature_value, 'k.-', label='mns1')
feature_value = feature_normalize[23]
plt.plot(t_second, feature_value, color='gold', linestyle='-', marker='.', label='mns2')
plt.legend(loc='upper right')
plt.savefig('./results/3.jpg')
plt.show()
🎉3 参考文献
[1] nardo f d , morbidoni c , cucchiarelli a ,et al.influence of emg-signal processing and experimental set-up on prediction of gait events by neural network[j].biomedical signal processing and control, 2021, 63:102232.doi:10.1016/j.bspc.2020.102232.
[2]游淼.基于肌动图(mmg)与肌电图(emg)信号的假肢控制系统研究[d].中南大学,2012.doi:cnki:cdmd:2.1011.179752.
[3]邹国栋,熊平,武振兴,等.基于语音与肌电融合的多自由度假肢控制系统的研究[j].中华物理医学与康复杂志, 2012.



发表评论