目录
单元平均恒定虚警率(cell-averaging constant false alarm rate, ca-cfar)是一种广泛应用于雷达信号处理和图像检测领域的关键技术,旨在实现对目标的有效检测同时保持稳定的误报率。在复杂背景环境下,ca-cfar通过对检测单元及其周围参考单元的平均功率进行比较,以确定一个自适应的检测阈值,从而实现恒定的虚警率。
1.cfar概述
虚警率(false alarm rate, far)是衡量检测系统误报能力的重要指标,定义为在无目标存在条件下,检测器给出目标存在的概率。理想的检测系统应能在各种环境条件下保持恒定的far,以确保对实际威胁的可靠检测。ca-cfar正是基于这一原则设计,通过动态调整检测阈值,使其与背景噪声水平相适应,从而实现far的恒定。
在信号处理领域,cfar(constant false alarm rate,恒定虚警率)单元是一种用于探测目标的算法,主要应用在雷达和声纳系统中。它的目的是在不同的背景噪声条件下,维持虚警率(错误地将噪声误判为目标的概率)在一个预定的恒定水平。这样可以确保系统在不同的环境和噪声条件下都有相对稳定的检测性能。
cfar处理通常是在检测阈值的确定上进行工作,这个阈值用于判断某个信号是否为目标。在实际应用中,背景噪声往往不是均匀分布的,可能会因为多种因素(如环境变化、天气条件等)而有所不同。cfar算法通过估计接收信号中的噪声水平来动态调整检测阈值。
cfar算法有多种类型,其中最常见的几种包括:
单元平均cfar(cell averaging cfar, ca-cfar):通过计算周围单元格的平均功率来估计噪声水平,并据此设置阈值。
最大值cfar(greatest of cfar, go-cfar):从多个邻近单元格中选择最大值来估计噪声水平。
最小值cfar(smallest of cfar, so-cfar):从多个邻近单元格中选择最小值来估计噪声水平。
概率密度cfar(probability density function cfar, pdf-cfar):考虑背景噪声的概率分布特性来确定阈值。
每种cfar算法都有其特定的应用场景和优势,选择哪一种算法取决于具体的系统要求和环境条件。cfar技术是提高雷达和声纳目标检测能力的重要手段之一,有助于减少虚警和漏警,提高系统的整体性能。
2.cfar基本流程
ca-cfar的基本流程如下:
-
数据预处理:对原始雷达回波数据进行必要的预处理,如距离-多普勒校正、杂波抑制等。
-
窗口划分:将待检测区域划分为多个单元(cells),每个单元代表一个潜在的目标位置。通常,单元大小根据雷达分辨率和目标特性确定。
-
参考窗选取:在待检测单元两侧选取若干个相邻单元作为参考窗(guard cells)和统计窗(training cells)。参考窗用于保护待检测单元不受邻近强目标影响,统计窗则用于估计背景噪声水平。
-
平均功率计算:计算统计窗内所有单元的平均功率,记为p_{avg}。
-
阈值设定:设定一个与期望虚警率相关的常数k,检测阈值t由下式确定:
![]()
6.目标检测:比较待检测单元的功率p_{d}与阈值t,若p_{d} > t,则判定存在目标;否则,判定无目标。
3.matlab核心程序
% 函数定义:计算恒虚警率(constant false alarm rate, cfar)阈值,并绘制信号及cfar阈值图
function y = func_cacfar(snrdbvalue, noise)
% 初始化信号变量,将原始噪声赋值给信号变量
signal = noise;
% 在指定位置(索引100、300和450)增强信号强度,基于输入的snr分贝值
signal([100, 300, 450]) = [noise(100) * 10^(snrdbvalue / 10), noise(300) * 10^(snrdbvalue / 10), noise(450) * 10^(snrdbvalue / 10)];
% 定义参考窗口长度
reflength = 12;
% 定义保护间隔长度
guardlength = 3;
% 定义偏移量
offset = 0.25;
% 创建滑动窗函数,中心部分为参考窗口,两侧为保护间隔
cfarwin = ones((reflength + guardlength) * 2 + 1, 1);
cfarwin(reflength + 1 : reflength + 1 + 2 * guardlength) = 0; % 设置保护间隔为0
cfarwin = cfarwin / sum(cfarwin); % 归一化窗函数
% 计算噪声水平,通过对信号进行加权平均(卷积操作)
noiselevel = conv(signal, cfarwin, 'same');
% 计算cfar阈值,基于噪声水平加上偏移量
cfarthreshold = noiselevel + offset;
% 绘制图形
figure
plot(signal); % 绘制原始信号
hold on; % 保持当前图像,在同一张图上添加新的数据
plot(cfarthreshold, 'r', 'linewidth', 2); % 绘制cfar阈值线,红色,线宽为2
legend('signal', 'cfar threshold'); % 图例显示
xlabel('分辨率单元索引'); % x轴标签
ylabel('db'); % y轴标签
title(['当snr为' num2str(snrdbvalue) 'db时的恒虚警检测阈值']); % 图形标题,显示snr值
end
up40604.仿真结果
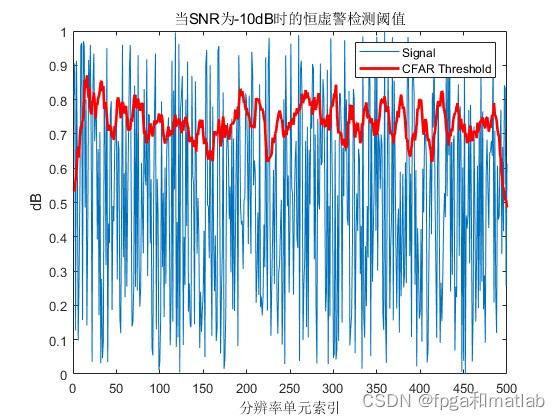
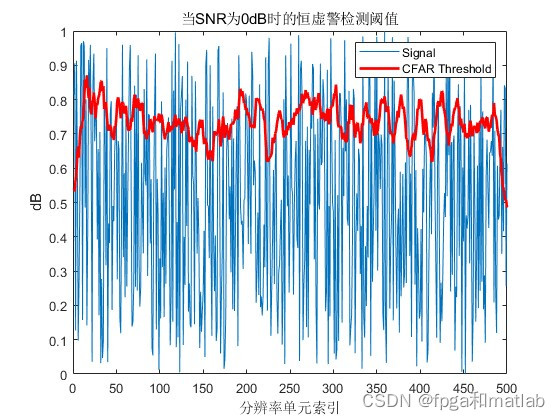
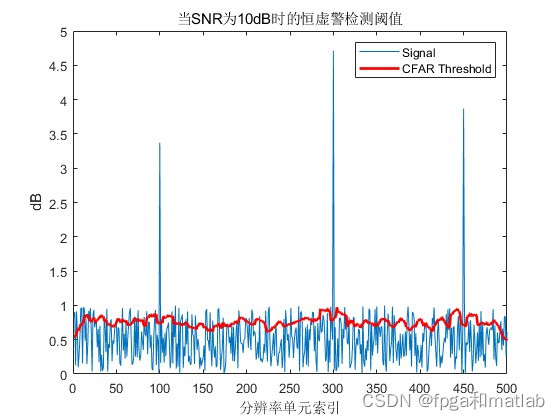
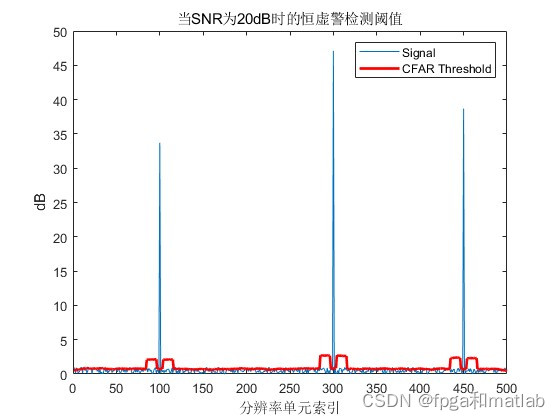
单元平均恒定虚警率(ca-cfar)是一种有效的雷达信号检测方法,通过动态调整检测阈值与背景噪声水平相适应,实现恒定的虚警率。该算法基于瑞利分布假设,通过对参考窗内单元功率的平均处理,估计背景噪声水平,并据此设定检测阈值。尽管ca-cfar在理想条件下表现出色,但在复杂背景环境中可能存在性能下降问题,需要结合具体应用场景,选择或开发更为稳健的cfar变种算法。随着雷达技术和信号处理理论的发展,cfar算法将持续优化,以应对日益复杂的探测任务和环境挑战。



发表评论