三、不再无奈二选一 详解能双目避障的石头全新算法系统
如果你看过此前笔者写过的各型扫地机器人评测,那么相信对频频出现的“slam”会留有印象。
slam是“simultaneous localization and mapping”的缩写,翻译过来可以叫它“同步定位与建图”,具体指的是机器人一边计算自己的位置一边规划地图的过程,针对的也就是扫地机器人在哪里、周围是什么的问题,包含定位和建图这两方面,并基于此规划路径躲避障碍。
过去在扫地机器人当中出现的方案可以分为两大传统派系,一个是激光slam,另一个就是视觉slam。
我们此前测试过的扫地机器人基本全都是激光slam型的机器,它们依靠发射激光光束,然后再弹回来,以此测绘出机器人和目标地点的距离形成二维图像。一次得到周围障碍点的角度和距离,优点是采集速度快、计算量小,而弊端也显而易见,是无法探测透明的物体,并且很难在大面积户型精准定位。
视觉slam则是能看到真实环境,它以摄像头为传感器,对于环境的区分度更高,不过需要更高的算力,每秒采集多帧图像,实现高清摄像定位,同步slam构图,然而大量的单目视觉slam扫地机器人在光线昏暗或无光环境当中难以准确定位。
有没有一种可能让视频功能与激光slam结合起来,优势互补?
连石头自己都表示——全新的rr mason 算法系统是石头最关键的软实力,其负责管理分发传感器采集的环境数据,交由“感知与建图算法”进行数据融合与分析,然后“导航与运动算法”根据分析结果进行动态导航及规划。
同时可以注意到的是,就是石头扫地机器人t7 pro的视频功能并不是视觉slam,其slam部分仍然是由激光承担,毕竟视觉slam核心是定位与建图,只是本质是用图像上提取的特征点,而石头扫地机器人t7 pro的视频功能承担的责任是进行ai识别。

笔者在测试当中发现,在同一户型下,石头扫地机器人t7 pro的建图速度、清扫面积上都要领先于过去的纯lds激光雷达产品,比如在一些角落当中,由于桌腿和凳腿及其他杂物的干扰,导致传统的lds雷达不能精确识别避障,会直接略过,而石头扫地机器人凭借双目加持能够巧妙规划工作路径绕行进入。
——为什么说双目碾压单目?
视觉识别系统通常来说可以包括一个或两个摄像头。单一的照片只具有二维信息,犹如2d电影,并无直接的空间感,只有靠我们自己依靠“物体遮挡、近大远小”等生活经验脑补,故单一的摄像头获取到的信息及其有限,并不能直接得到我们想要的效果(当然能够通过一些其他手段辅助获取,但是此项还不成熟,并没有大规模验证)。
类比到机器视觉中,单个摄像头的图片信息无法获取到场景中每个物体与镜头的距离关系,即缺少第三个维度。
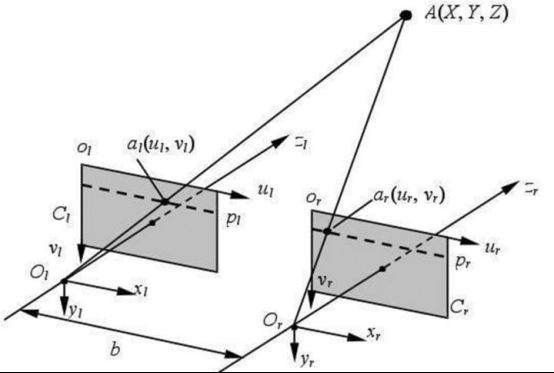
双目技术原理
单一的图片具有很强的迷惑性和不确定性,尤其是现实生活中的场景极度复杂,单个摄像头发生视觉误算的概率非常大,可能会计算错物体的实际距离。
所以这便需要扫地机器人从单个摄像头升级到两个摄像头,即立体视觉,直接提供第三个维度的信息,也就是景深信息。所以搭载单个摄像头的扫地机把所有物体都识别成二维物体,并不是三维立体。
对单目来说,要想获得距离信息,必须先识别目标:单目测距和 3d 估计靠的是检测目标的 bounding box(bb),对于未识别的物体,该系统就无法估计其距离,比如如果闭着一只眼睛,对于不认识的的东西是没办法估计其大小和距离的。
也就是说单目扫地机器人只能对预先训练好的物体进行估算,但实际家庭环境千差万别,不可能对所有会造成卡困物体都进行训练。需要假设物体是在地面上,如果实际不是则会导致测距误差,比如物体在厚地毯上。把物体作为一个立方体看待,只是粗略估算,并不是精确测距,并不知道物体实际的3d形状,会导致更多漏扫。

发表评论