1.准备工作
海康官网下载相机驱动海康机器人-机器视觉-下载中心

安装好以后找到python的开发文件目录参考:d:\mvs\mvs\development\samples\python\mvimport这几个文件很重要,想调用海康相机取图会用到.
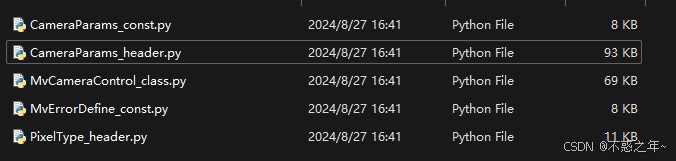
为了写代码方便可以把这几个文件拷贝一下,跟你的api主文件放在同一个文件夹下可以减少80%的烦恼.
2.打开相机
1.枚举设备
我这里枚举了两种设备usb和网口:

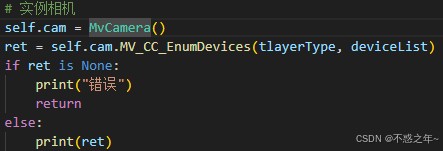
2.实例化相机
好多刚入坑的人会忽略这一步
3.选择相机
这里选择用编号来连接相机,后边更深入学习后可改用ip链接相机,我电脑就插入了一个海康的网口相机,所以int(0)直接写0就好了

4.设置触发方式
因为海康相机触发方式有可能是on,off才可以打开相机,所以为了避免新手遇到一堆报错,这里直接代码设置触发方式为off,(也可以通过mvs把相机触发方式设置为off).

5.打开相机
连接相机

6.开始取流
到取流这一步可以想象成已经打开了相机实时取图这一步

3.获取一张图像
获取一张图像数据

4.关闭相机
停止取流---关闭设备---销毁句柄

5.完整代码
把最后注释掉的代码释放掉运行,就可以看到你相机拍摄的图片了
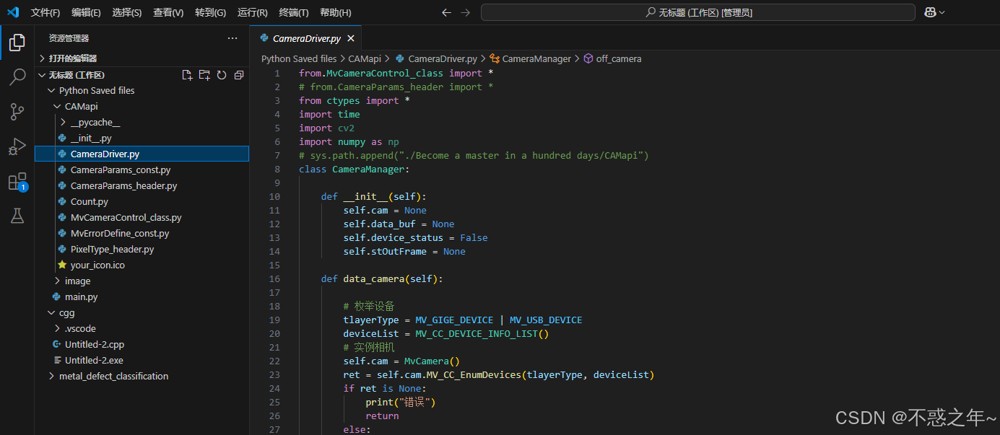
from.mvcameracontrol_class import *
# from.cameraparams_header import *
from ctypes import *
import time
import cv2
import numpy as np
# sys.path.append("./become a master in a hundred days/camapi")
class cameramanager:
def __init__(self):
self.cam = none
self.data_buf = none
self.device_status = false
self.stoutframe = none
def data_camera(self):
# 枚举设备
tlayertype = mv_gige_device | mv_usb_device
devicelist = mv_cc_device_info_list()
# 实例相机
self.cam = mvcamera()
ret = self.cam.mv_cc_enumdevices(tlayertype, devicelist)
if ret is none:
print("错误")
return
else:
print(ret)
# 选择设备
stdevicelist = cast(devicelist.pdeviceinfo[int(0)], pointer(mv_cc_device_info)).contents
# 创建句柄
ret = self.cam.mv_cc_createhandlewithoutlog(stdevicelist)
# start_time = time.time()
# 获取设备名称,返回是一个内存地址,循环遍历用chr把每个字符码转换为字符
# strmodename = ""
# for per in stdevicelist.specialinfo.stgigeinfo.chmodelname:
# strmodename = strmodename + chr(per)
# print(f"device model name:{strmodename}")
# 获取设备名称,ctypes.string_at 函数直接将内存地址中的内容读取为字节字符串,然后使用 decode('utf-8') 进行解码。
strmodename = ctypes.string_at(stdevicelist.specialinfo.stgigeinfo.chmodelname).decode('utf-8')
print(f"设备名称:{strmodename}")
# end_time = time.time()
# camera_time = round(abs(start_time - end_time) * 1000, 3) # 保留小数点后3为,拍照时间
# print(f"获取设备名称时间:{camera_time}ms")
# 设置触发方式
ret = self.cam.mv_cc_setenumvalue("triggermode", mv_trigger_mode_off)
# 打开相机
ret = self.cam.mv_cc_opendevice(mv_access_exclusive, 0)
print("打开相机执行码:[0x%x]" % ret)
# 开始取流
ret = self.cam.mv_cc_startgrabbing()
self.device_status = true
return self.cam
def get_image(self):
# 获取一张图像
self.stoutframe = mv_frame_out() # 图像结构体,输出图像地址&信息
start_time = time.time()
ret = self.cam.mv_cc_getimagebuffer(self.stoutframe, 300) # 图像获取函数
print("图像获取执行码:[0x%x]" % ret)
end_time = time.time()
camera_time = round(abs(start_time - end_time) * 1000, 3) # 保留小数点后3为,拍照时间
print(f"获取图像时间:{camera_time}ms")
# 获取图像数据的长度和指针
npayloadsize = self.stoutframe.stframeinfo.nframelen
pdata = self.stoutframe.pbufaddr
# 将数据存储在 data_buf 中
self.data_buf = (c_ubyte * npayloadsize)()
cdll.msvcrt.memcpy(byref(self.data_buf), pdata, npayloadsize)
end_time = time.time()
camera_time = round(abs(start_time - end_time) * 1000, 3) # 保留小数点后3为,拍照时间
print(f"获取图像储存时间:{camera_time}ms")
#释放图像缓存
self.cam.mv_cc_freeimagebuffer(self.stoutframe)
return self.data_buf
def off_camera(self):
# 停止取流
ret = self.cam.mv_cc_stopgrabbing()
print("停止取流执行码:[0x%x]" % ret)
# 关闭设备
ret = self.cam.mv_cc_closedevice()
print("关闭设备执行码:[0x%x]" % ret)
# 销毁句柄
ret = self.cam.mv_cc_destroyhandle()
print("销毁句柄执行码:[0x%x]" % ret)
self.device_status = false
return self.device_status
# #实例化类
# cam = cameramanager()
# deta_cam = input("输入1链接相机:")
# if deta_cam == "1":
# cam.data_camera()
# print(f"当前相机链接状态:{cam.device_status}")
# else:
# print("链接相机错误!")
# deta_cam = input("输入2获取图片:")
# if deta_cam == "2":
# cam.get_image()
# print(f"当前相机链接状态:{cam.device_status}获取图片!")
# else:
# print("获取图片错误!")
# # 将 c_ubyte 数组转换为 numpy 数组
# temp = np.frombuffer(cam.data_buf, dtype=np.uint8)
# # 检查图像的分辨率信息,假设它是 2048x1024x3
# # 但首先需要确认图像的真实分辨率和像素格式,这里假设为 rgb 格式
# # 你可能需要根据实际情况调整 reshape 的参数
# # 使用正确的分辨率信息进行重塑
# width = cam.stoutframe.stframeinfo.nwidth
# height = cam.stoutframe.stframeinfo.nheight
# channels = 3 # 假设是 rgb 图像,如果是其他格式,请修改
# print(width)
# print(height)
# try:
# temp = temp.reshape((height, width, channels))
# except exception as e:
# print(f"reshape error: {e}")
# # 将 bgr 转换为 rgb
# temp = cv2.cvtcolor(temp, cv2.color_rgb2bgr)
# # 转换为灰度图像
# gray = cv2.cvtcolor(temp, cv2.color_rgb2gray)
# # 显示图像
# cv2.namedwindow("ori", cv2.window_normal)
# cv2.imshow("ori", temp)
# # 显示灰度图像
# cv2.namedwindow("gray", cv2.window_normal)
# cv2.imshow("gray", gray)
# cv2.waitkey(0)
# deta_cam = input("输入3关闭相机设备:")
# if deta_cam == "3":
# cam.off_camera()
# print(f"当前相机链接状态:{cam.device_status}")
# else:
# print("关闭相机错误!")总结
到此这篇关于python海康相机api超简单入坑指南的文章就介绍到这了,更多相关python海康相机api内容请搜索代码网以前的文章或继续浏览下面的相关文章希望大家以后多多支持代码网!





发表评论