目录
1 引入
要操作 gpio 引脚,先把所用引脚配置为 gpio 功能,这通过 pinctrl 子系统来实现。
然后就可以根据设置引脚方向(输入还是输出)、读值──获得电平状态,写值──输出高低电平。
以前我们通过寄存器来操作 gpio 引脚,即使 led 驱动程序,对于不同的板子它的代码也完全不同。
当 bsp 工程师实现了 gpio 子系统后,我们就可以:
⚫ 在设备树里指定 gpio 引脚
⚫ 在驱动代码中:使用 gpio 子系统的标准函数获得 gpio、设置 gpio 方向、读取/设置 gpio 值。
这样的驱动代码,将是单板无关的。
2 在设备树中指定引脚
在几乎所有 arm 芯片中,gpio 都分为几组,每组中有若干个引脚。所以在使用 gpio 子系统之前,就要先确定:它是哪组的?组里的哪一个?
在设备树中,“gpio 组”就是一个 gpio controller,这通常都由芯片厂家设置好。我们要做的是找到它名字,比如“gpio1”,然后指定要用它里面的哪个引脚,比如<&gpio1 0>。
有代码更直观,下图是一些芯片的 gpio 控制器节点,它们一般都是厂家定义好,在 xxx.dtsi 文件中:
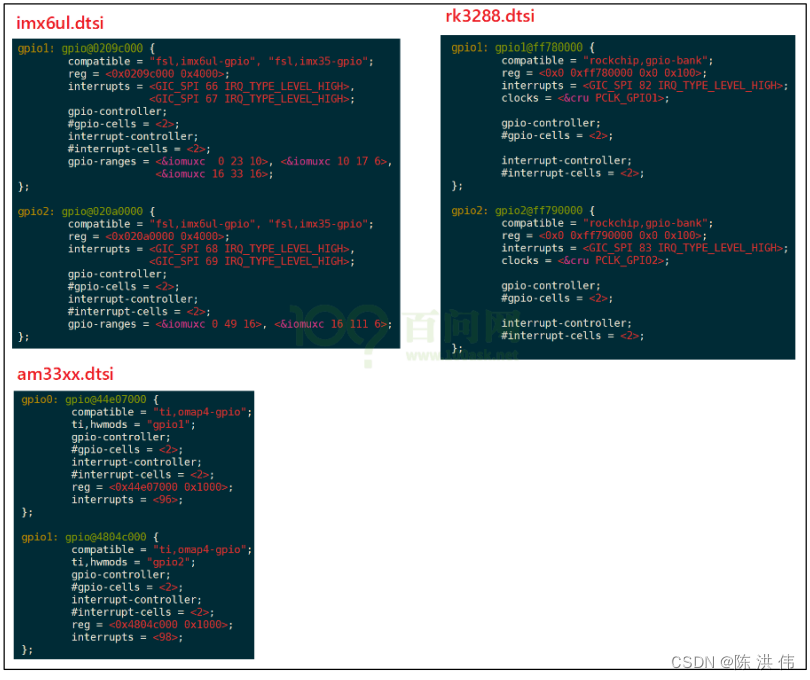
我们暂时只需要关心里面的这 2 个属性:
gpio-controller;
#gpio-cells = <2>; ⚫ “gpio-controller”表示这个节点是一个 gpio controller,它下面有很多引脚。
⚫ “#gpio-cells = <2>”表示这个控制器下每一个引脚要用 2 个 32 位的数(cell)来描述。
为什么要用 2 个数?其实使用多个 cell 来描述一个引脚,这是 gpio controller 自己决定的。比如可以用其中一个 cell 来表示那是哪一个引脚,用另一个 cell 来表示它是高电平有效还是低电平有效,甚至还可以用更多的cell 来示其他特性。
普遍的用法是,用第 1 个 cell 来表示哪一个引脚,用第 2 个 cell 来表示有效电平:
gpio_active_high : 高电平有效
gpio_active_low : 低电平有效 定义 gpio controller 是芯片厂家的事,我们怎么引用某个引脚呢?在自己的设备节点中使用属性"[<name>-]gpios",示例如下:
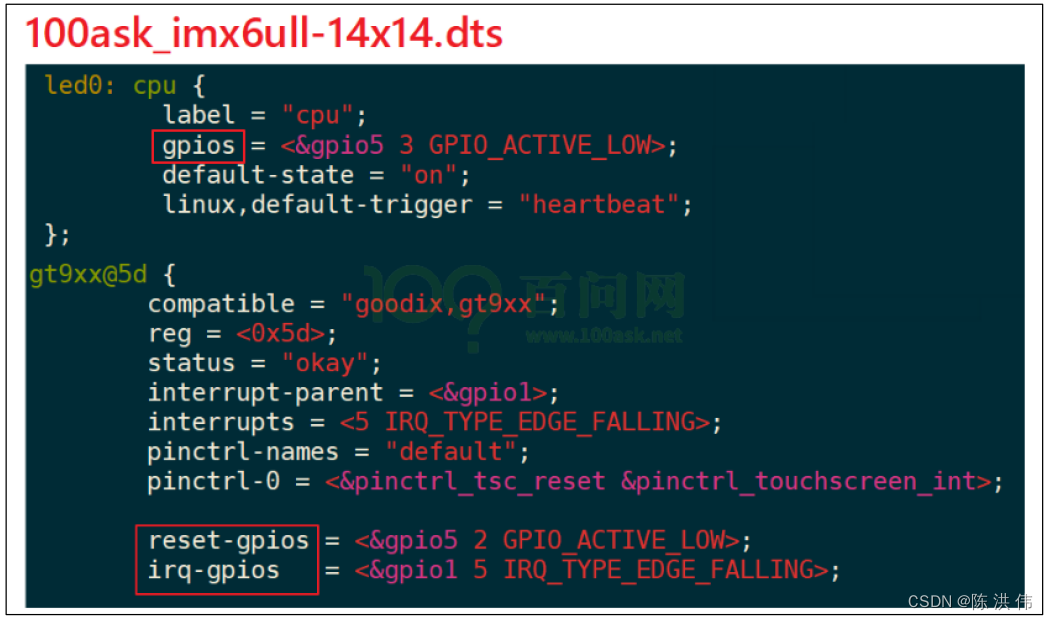
上图中,可以使用 gpios 属性,也可以使用 name-gpios 属性。
3 在驱动代码中调用gpio子系统
在设备树中指定了 gpio 引脚,在驱动代码中如何使用? 也就是 gpio 子系统的接口函数是什么?
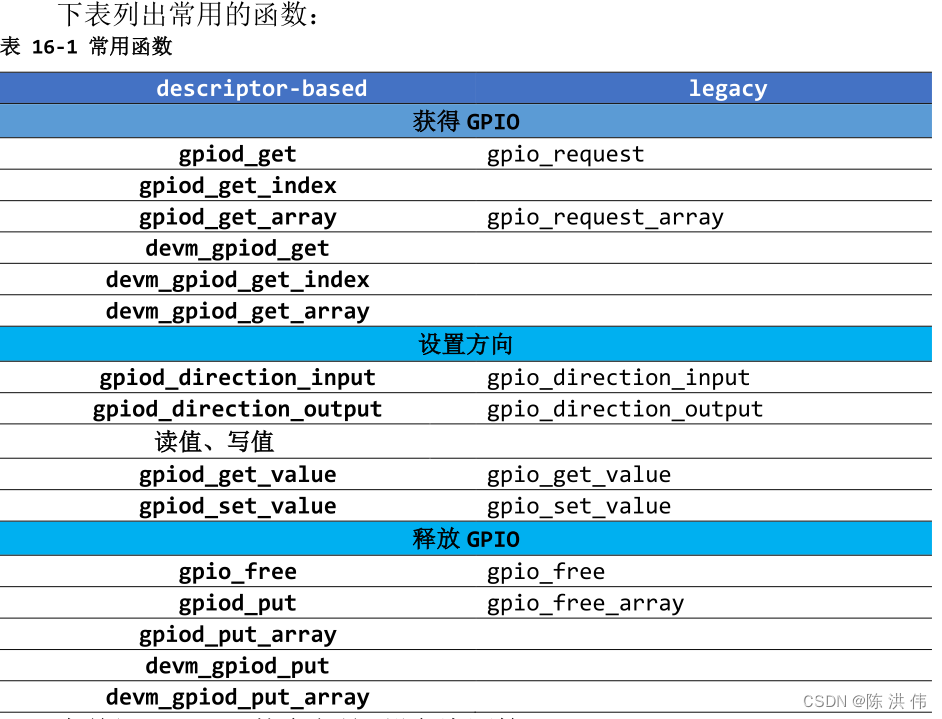
gpio 子系统有两套接口:基于描述符的(descriptor-based)、老的(legacy)。前者的函数都有前缀“gpiod_”,它使用 gpio_desc 结构体来表示一个引脚;后者的函数都有前缀“gpio_”,它使用一个整数来表示一个引脚。
要操作一个引脚,首先要 get 引脚,然后设置方向,读值、写值。 驱动程序中要包含头文件,
#include <linux/gpio/consumer.h> // descriptor-based
或
#include <linux/gpio.h> // legacy
有前缀“devm_”的含义是“设备资源管理”(managed device resource),这是一种自动释放资源的机制。它的思想是“资源是属于设备的,设备不存在时资源就可以自动释放”。
比如在 linux 开发过程中,先申请了 gpio,再申请内存;如果内存申请失败,那么在返回之前就需要先释放 gpio 资源。如果使用 devm 的相关函数,在内存申请失败时可以直接返回:设备的销毁函数会自动地释放已经申请了的 gpio资源。
建议使用“devm_”版本的相关函数。
假设备在设备树中有如下节点:
foo_device {
compatible = "acme,foo";
...
led-gpios = <&gpio 15 gpio_active_high>, /* red */
<&gpio 16 gpio_active_high>, /* green */
<&gpio 17 gpio_active_high>; /* blue */
power-gpios = <&gpio 1 gpio_active_low>;
}; 那么可以使用下面的函数获得引脚:
struct gpio_desc *red, *green, *blue, *power;
red = gpiod_get_index(dev, "led", 0, gpiod_out_high);
green = gpiod_get_index(dev, "led", 1, gpiod_out_high);
blue = gpiod_get_index(dev, "led", 2, gpiod_out_high);
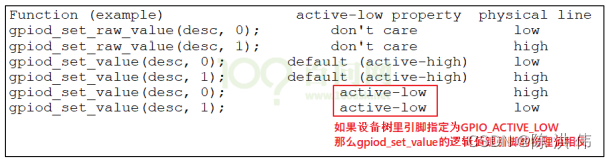
power = gpiod_get(dev, "power", gpiod_out_high); 注意:gpiod_set_value 设置的值是“逻辑值”,不一定等于物理值。 什么意思?
旧的“gpio_”函数没办法根据设备树信息获得引脚,它需要先知道引脚号。 引脚号怎么确定?
在 gpio 子系统中,每注册一个 gpio controller 时会确定它的“base number”,那么这个控制器里的第 n 号引脚的号码就是:base number + n。
但是如果硬件有变化、设备树有变化,这个 base number 并不能保证是固定的,应该查看 sysfs 来确定 base number。
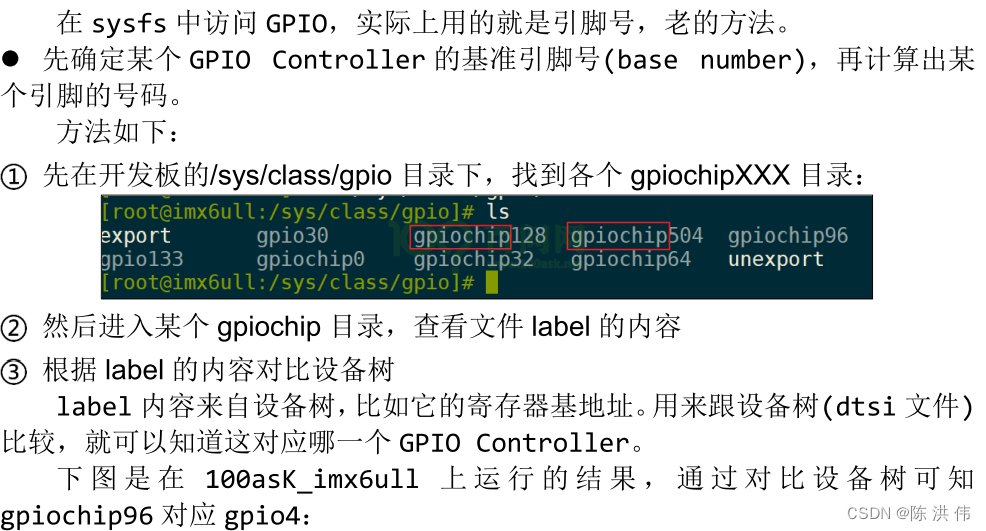
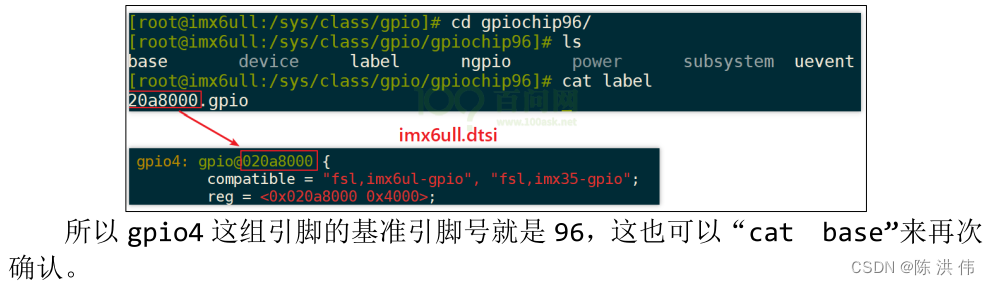
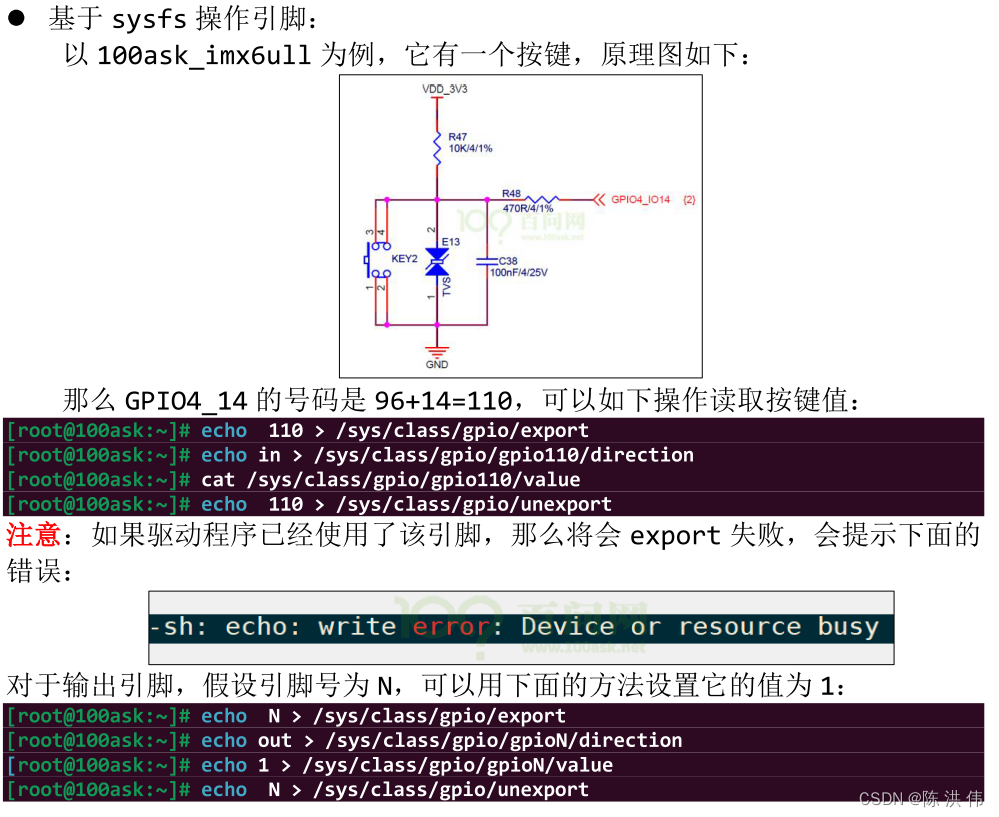
4 sysfs 中的访问方法




发表评论