docker常用指令
启动类指令
- 启动docker:
systemctl start docker - 停止docker:
systemctl stop docker - 重启docker:
systemctl restart docker - 查看docker状态:
systemctl status docker - 开机启动:
systemctl enable docker - 查看docke帮助文档:
docker --help - 查看docker命令帮助文档:
docker 具体命令 --help
镜像相关的指令
列出本机上所有镜像
指令:docker [option] images
option说明:
-a :列出本地所有的镜像(含历史映像层)
-q :只显示镜像id。

选项说明:
- repository:表示镜像的仓库源
- tag:镜像的标签版本号
- image id:镜像id
- created:镜像创建时间
- size:镜像大小
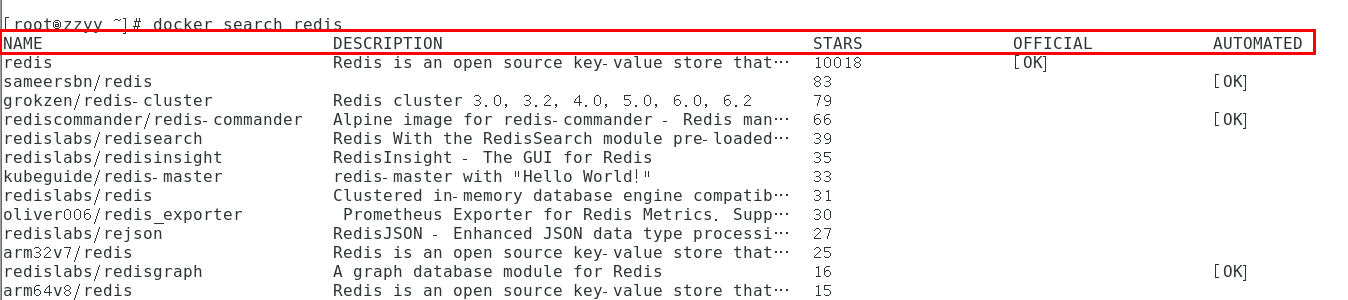
搜索镜像
搜索镜像有两种方式:
-
直接在docker的官方仓库网站搜索 https://hub.docker.com
-
指令搜索
docker search [options] 镜像名字options说明:–limit : 只列出n个镜像,默认25个
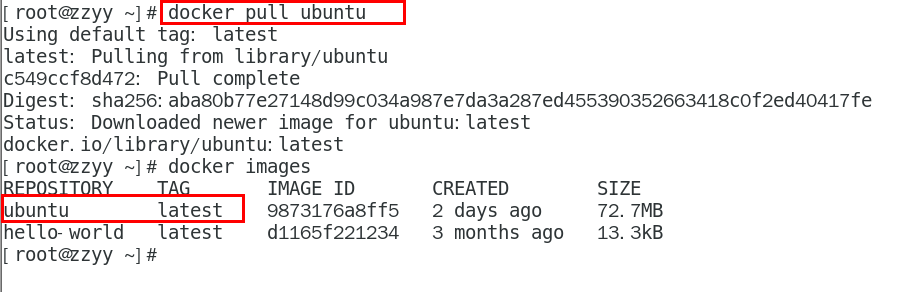
拉取镜像
指令:docker pull 镜像名字[:tag]
如果不指定tag默认拉取最新版的镜像,等价与 docker pull 镜像名字:latest
删除镜像
指令:docker rmi [options] 镜像id ,options为 -f,表示强制删除
删除单个:docker rmi -f 镜像id
删除多个:docker rmi -f 镜像名1:tag 镜像名2:tag
删除全部:docker rmi -f $(docker images -qa)
虚悬镜像
即仓库名、标签都是none的镜像,俗称虚悬镜像dangling image。这里简单了解即可,反面在dockerfile中会详细说。
容器相关的指令
-
运行容器:
docker run [options] 镜像id [命令]options:
-p:指定主机和容器之间的端口映射
-d:以守护进程运行容器,即后台运行
-it:交互模式
--name:指定容器名称
--restart:开机启动,即docker启动的时候运行该容器
-v:指定容器卷
--network:指定容器的网络模式
其中,后两个选项等到讲容器卷和网络模式的时候再做具体介绍,这里先跳过。
-
运行一个已经停止的容器:
docker start 容器id -
重启容器:
docker restart 容器id -
停止容器:
docker stop 容器id -
查看容器:
docker inspect 容器id -
查看容器列表:
docker ps [options] -
进入正在运行的容器:
docker exec 容器id:是在容器中打开新的终端,并且可以启动新的进程;用exit退出,不会导致容器的停止,该指令一般会搭配-it选项使用,表示以交互模式进入正在运行, 如:docker -it 容器id bash。docker attach 容器id:直接进入容器启动命令的终端,不会启动新的进程;用exit退出,会导致容器的停止。
-
从容器内拷贝文件到主机上:
docker cp 容器id:容器内路径 目的主机路径 -
导出容器:
export 导出容器的内容留作为一个tar归档文件[对应import命令] -
导入容器:
import 从tar包中的内容创建一个新的文件系统再导入为镜像[对应export]
docker镜像
概念
是一种轻量级、可执行的独立软件包,它包含运行某个软件所需的所有内容,我们把应用程序和配置依赖打包好形成一个可交付的运行环境(包括代码、运行时需要的库、环境变量和配置文件等),这个打包好的运行环境就是image镜像文件。只有通过这个镜像文件才能生成docker容器实例,类似java中的类:通过一个类模板(镜像)可以创建一个对象(容器)。
unionfs(联合文件系统)
在拉取镜像的时候,我们可以看到拉取过程中,镜像视乎是一层一层下载的。那是不是也就意味着镜像是由一层层文件组成的呢?其实docker采用了unionfs(联合文件系统)来存储镜像,union文件系统(unionfs)是一种分层、轻量级并且高性能的文件系统,它支持对文件系统的修改作为一次提交来一层层的叠加,同时可以将不同目录挂载到同一个虚拟文件系统下(unite several directories into a single virtual filesystem)。union 文件系统是 docker 镜像的基础。镜像可以通过分层来进行继承,基于基础镜像(没有父镜像),可以制作各种具体的应用镜像。
docker镜像加载原理
docker的镜像实际上由一层一层的文件系统组成,这种层级的文件系统unionfs。
bootfs(boot file system)主要包含bootloader和kernel, bootloader主要是引导加载kernel, linux刚启动时会加载bootfs文件系统,在docker镜像的最底层是引导文件系统bootfs。这一层与我们典型的linux/unix系统是一样的,包含boot加载器和内核。当boot加载完成之后整个内核就都在内存中了,此时内存的使用权已由bootfs转交给内核,此时系统也会卸载bootfs。
rootfs (root file system) ,在bootfs之上。包含的就是典型 linux 系统中的 /dev, /proc, /bin, /etc 等标准目录和文件。rootfs就是各种不同的操作系统发行版,比如ubuntu,centos等等。

那为什么docker镜像要采用分层结构呢?
发布镜像
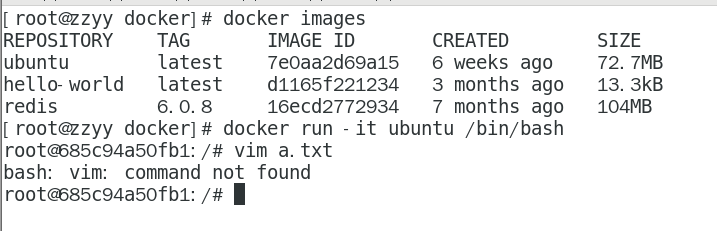
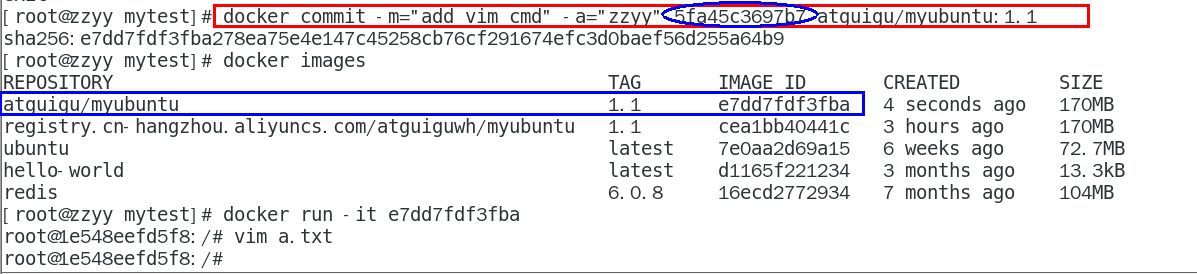
我们可以通过指令来提交容器使之成为一个新的镜像,比如我们以ubuntu为例;我们知道,最简单的ubuntu内核是不包含有vim编辑器的功能的,我们在ubuntu的基础上下载vim之后提交该容器实例使之成为一个新镜像,然后通过新镜像运行一个带有vim指令的ubuntu容器。
核心指令:docker commit -m="提交的描述信息" -a="作者" 容器id 要创建的目标镜像名:[标签名]
步骤:
-
拉取ubuntu基础镜像
docker pull ubuntu -
运行ubuntu容器实例
docker run --name ubuntu ubuntu docker exec -it ubuntu bash此时进入该容器可以看到原始的ubuntu是不带有vim命令的:
-
在运行的容器中下载vim
apt-get update apt-get -y install vim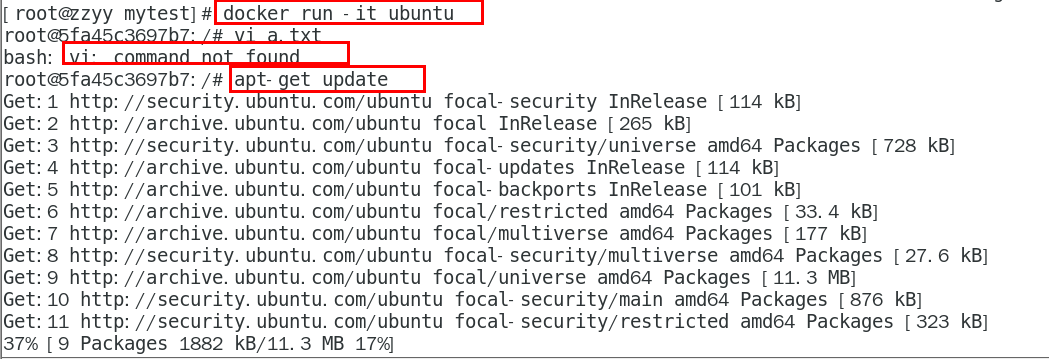
-
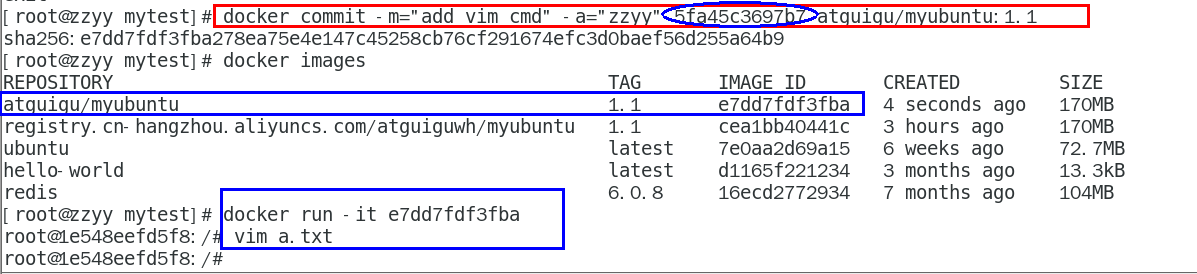
提交该容器到远程仓库中
-
启新镜像并和原来的对比




发表评论