学堂在线 课程页面链接
中国大学mooc 课程页面链接
b 站 视频链接
ppt和书籍下载网址: 【github 链接】
总述:
开始介绍第一个可以找到最优策略的算法。 ——> 动态规划算法
介绍 3 种 迭代算法:
1、值迭代算法: 上一章讨论的求解 bellman 最优方程的压缩映射定理 所提出的算法。
2、策略迭代算法
3、截断策略迭代算法: 值迭代 和 策略迭代 算法是该算法的极端情况。
动态规划 算法,需要系统模型。
本章介绍的策略迭代算法 扩展得到 第 5 章介绍的蒙特卡洛算法。
——————————————
model-based 算法
值迭代 上一章 的延伸
策略迭代 下一章 蒙特卡洛学习的基础

值迭代 和 策略迭代 是 截断策略迭代 的两个极端情况
4.1 值迭代
贝尔曼最优公式 的 矩阵向量形式:
v = f ( v ) = max π ( r π + γ p π v ) \bm v=f(\bm v) =\max\limits_\pi({\bm r}_\pi+\gamma {\bm p}_\pi {\bm v}) v=f(v)=πmax(rπ+γpπv)
求解方法: 上一章 的 压缩映射定理 建议的迭代算法 【值迭代】
v k + 1 = f ( v k ) = max π ( r π + γ p π v k ) , k = 1 , 2 , 3... {\bm v}_{k+1} = f({\bm v}_k)=\max\limits_\pi({\bm r}_\pi+\gamma {\bm p}_\pi {\bm v}_k), ~~~k=1, 2, 3... vk+1=f(vk)=πmax(rπ+γpπvk), k=1,2,3...
其中 v 0 {\bm v}_0 v0 可为任意值。
两步:
1、策略 更新 (policy update)
- v k {\bm v}_k vk 给定, 求解 π k + 1 = arg max π ( r π + γ p π v k ) \pi_{k+1} = \arg \max\limits_{\pi}({\bm r}_\pi+\gamma {\bm p}_\pi {\bm v}_k) πk+1=argπmax(rπ+γpπvk)
2、值 更新 (value update)
- 上一步得到的策略 π k + 1 \pi_{k+1} πk+1, 更新 v k + 1 = r π k + 1 + γ p π k + 1 v k {\bm v}_{k +1}={\bm r}_{\pi_{k+1}}+\gamma {\bm p}_{\pi_{k+1}}{\bm v}_k vk+1=rπk+1+γpπk+1vk
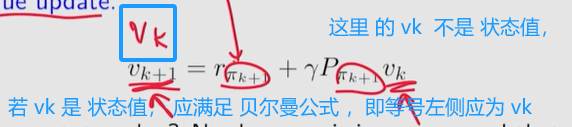
v
k
v_k
vk 是否是一个状态值?
答案是否定的。虽然
v
k
v_k
vk 最终收敛于最优状态值,但不能保证满足任何策略的 bellman方程。例如,它一般不满足
v
k
=
r
π
k
+
γ
p
π
k
v
k
v_k=r_{\pi_k}+\gamma p_{\pi_k}v_k
vk=rπk+γpπkvk 或
v
k
=
r
π
k
+
1
+
γ
p
π
k
+
1
v
k
v_k=r_{\pi_{k+1}}+\gamma p_{\pi_{k+1}}v_k
vk=rπk+1+γpπk+1vk。它只是算法生成的一个中间值。另外,由于
v
k
v_k
vk 不是状态值,所以
q
k
q_k
qk 不是动作值。
迭代流程
v k ( s ) → q k ( s , a ) → v_k(s)\to q_k(s, a)\to vk(s)→qk(s,a)→ 贪心策略 π k + 1 ( a ∣ s ) → ~\pi_{k+1}(a|s)\to πk+1(a∣s)→ 新的值 v k + 1 = max a q k ( s , a ) ~v_{k+1}=\max\limits_{a}q_k(s, a) vk+1=amaxqk(s,a)
伪代码: 值迭代算法
目标: 搜索 求解 贝尔曼最优公式的 最优状态值 和 最优策略。
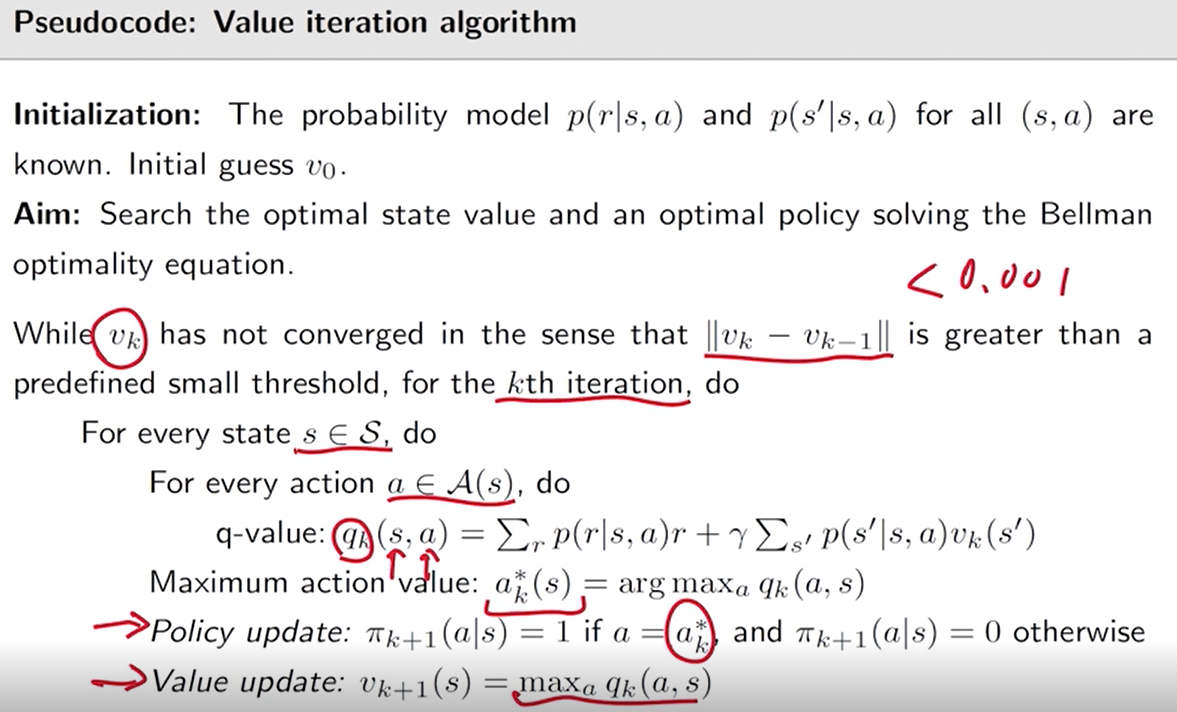
遍历 每个状态 中的 每个动作, 计算 q k q_k qk
- 策略 更新: 选择 q k q_k qk 最大的 action
- 值 更新: 将 v k + 1 ( s ) v_{k+1}(s) vk+1(s) 更新为 计算得到的最大 q k q_k qk
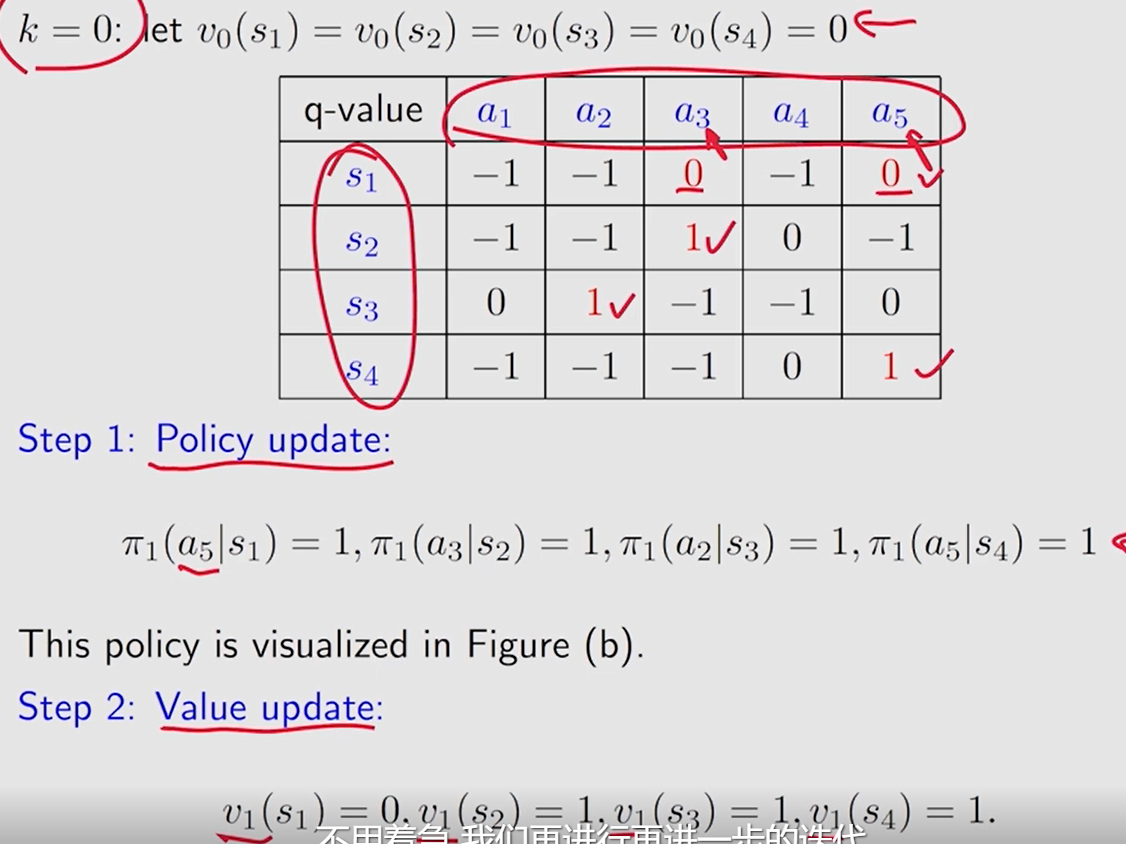
4.1.2 例子
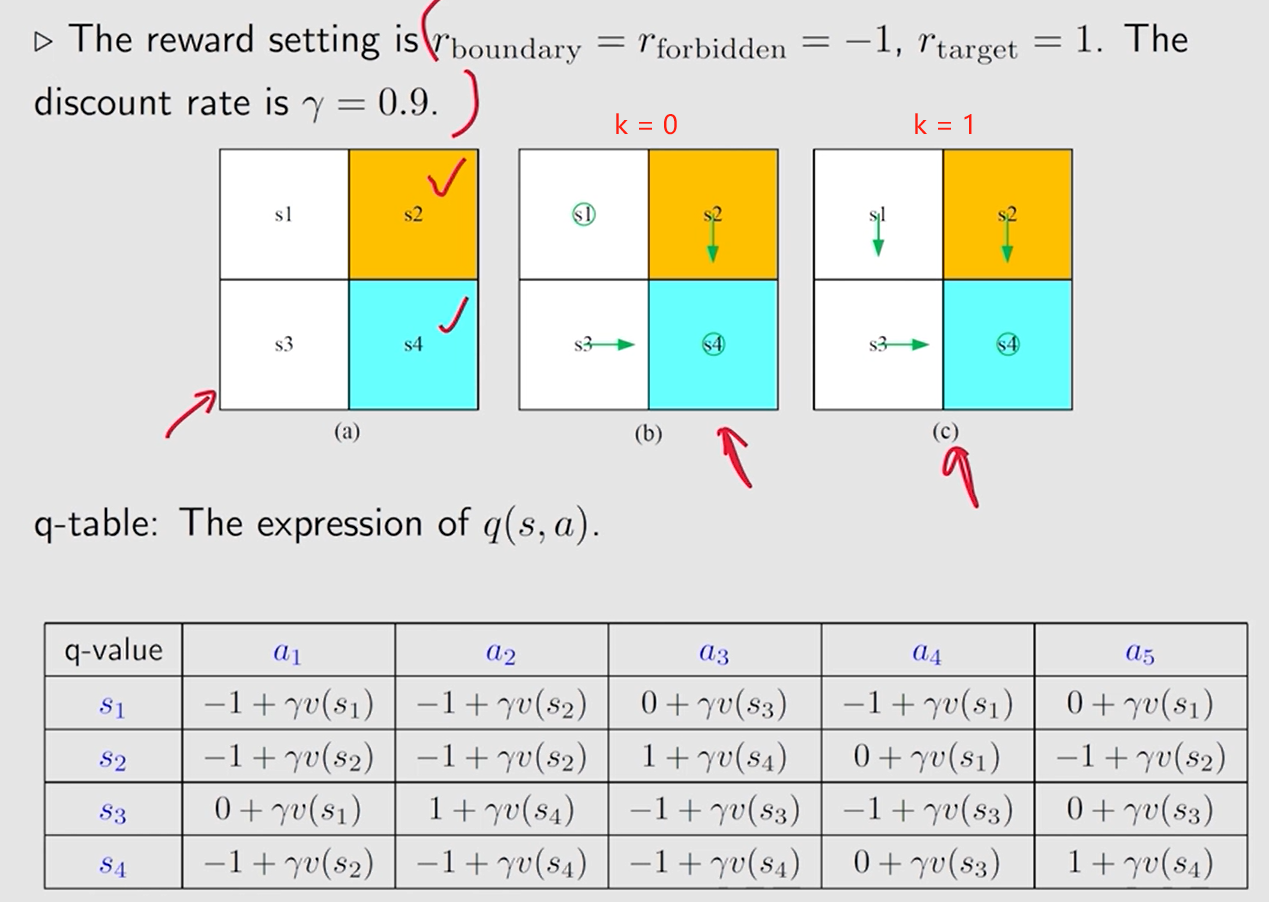
对 每个状态 的 每个动作 ,初始化 q q q 值表

按照这里
策略更新 是将 每个状态 的
q
q
q 值最大的动作 的选取概率
π
(
a
∣
s
)
\pi(a|s)
π(a∣s) 置为 1。
~~~
等效于 让策略在这一步 做这个
q
q
q 值最大的动作
值更新 是将 每个状态 的 值更新为 相应状态的最大
q
q
q 值。
v
0
v_0
v0 可以任意选取,这里选择为 0。 不同的初值选取对迭代过程影响多大?如何根据具体情况选取合适的初值?
——> 比较直觉的是若是初始值选得离最优状态值较远, 需要的迭代次数会多些。
对于 状态
s
1
s_1
s1,动作
a
3
a_3
a3 和
a
5
a_5
a5 对应的
q
q
q 都是最大的, 这里直接选了
a
5
a_5
a5, 有没有可能在这里选
a
3
a_3
a3 得到的才是最优策略呢?
——> 确实有可能, 所以要多次迭代,收敛后迭代结束获得的就是 最优策略。
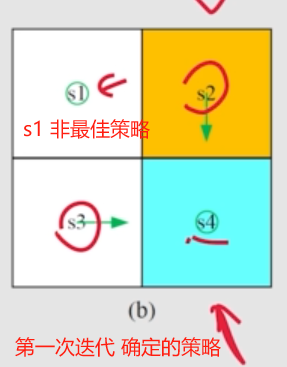
第一次 迭代, s1 没有达到 最优。
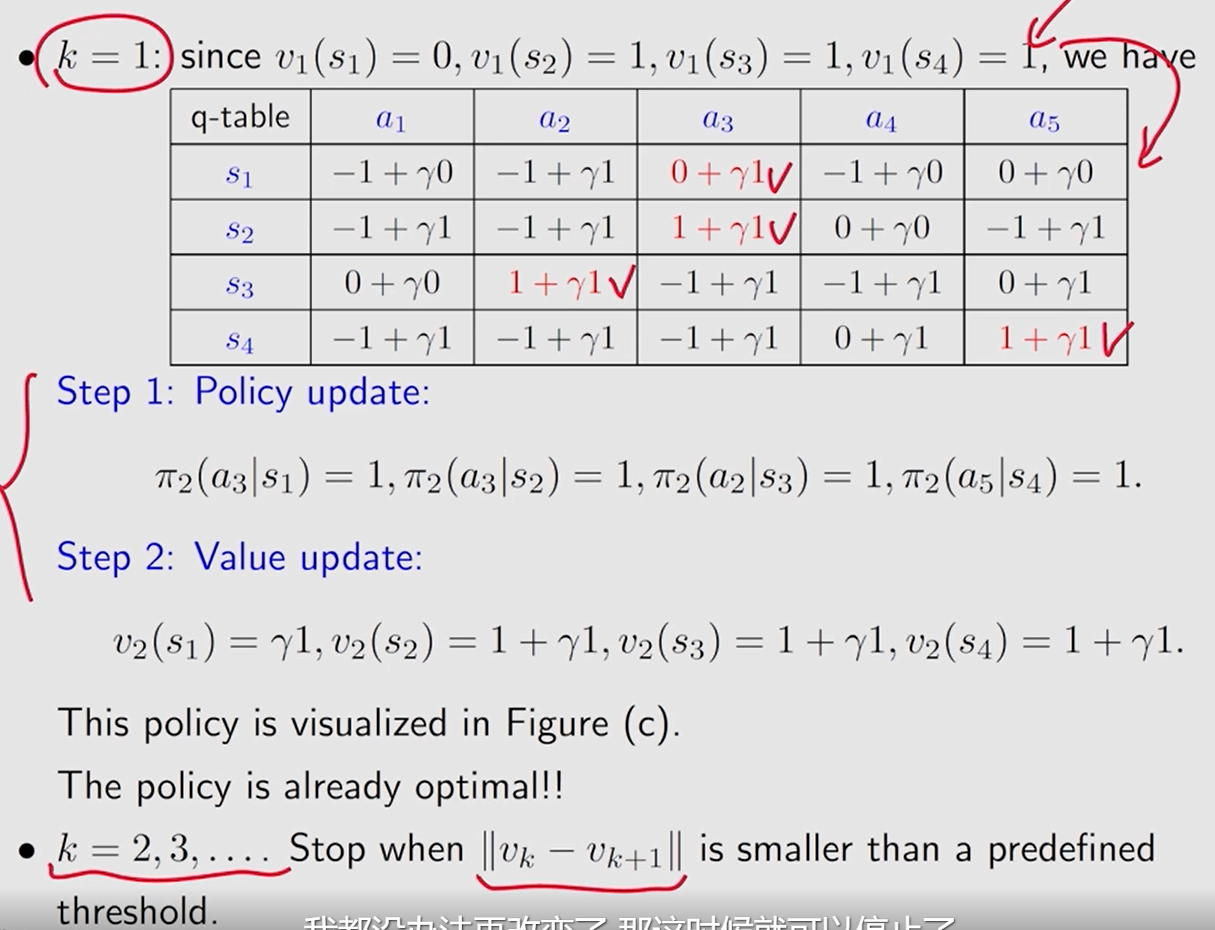
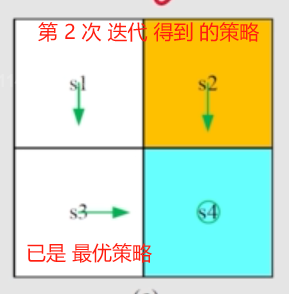
这里 迭代两次 就获得了 最优策略。
其它 更复杂情况 的迭代停止条件为:

迭代停止 则认为 获得了 最优策略。
4.2 策略迭代
主要内容: 是什么?——> 性质 ——> 如何 编程实现
任意给定的初始策略 π 0 \pi_0 π0
两步:
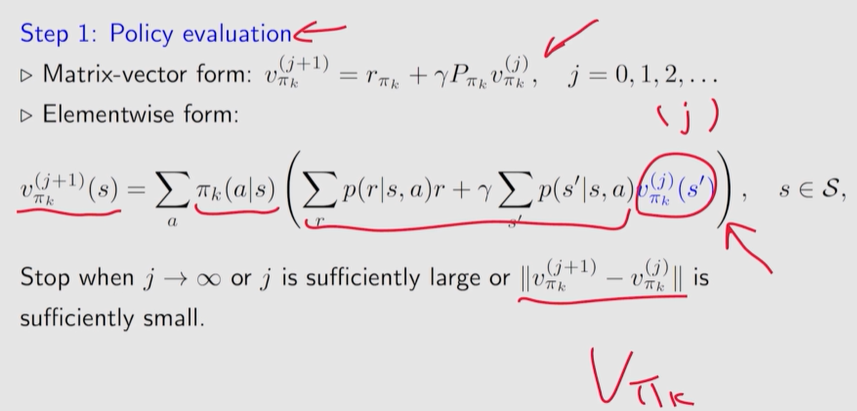
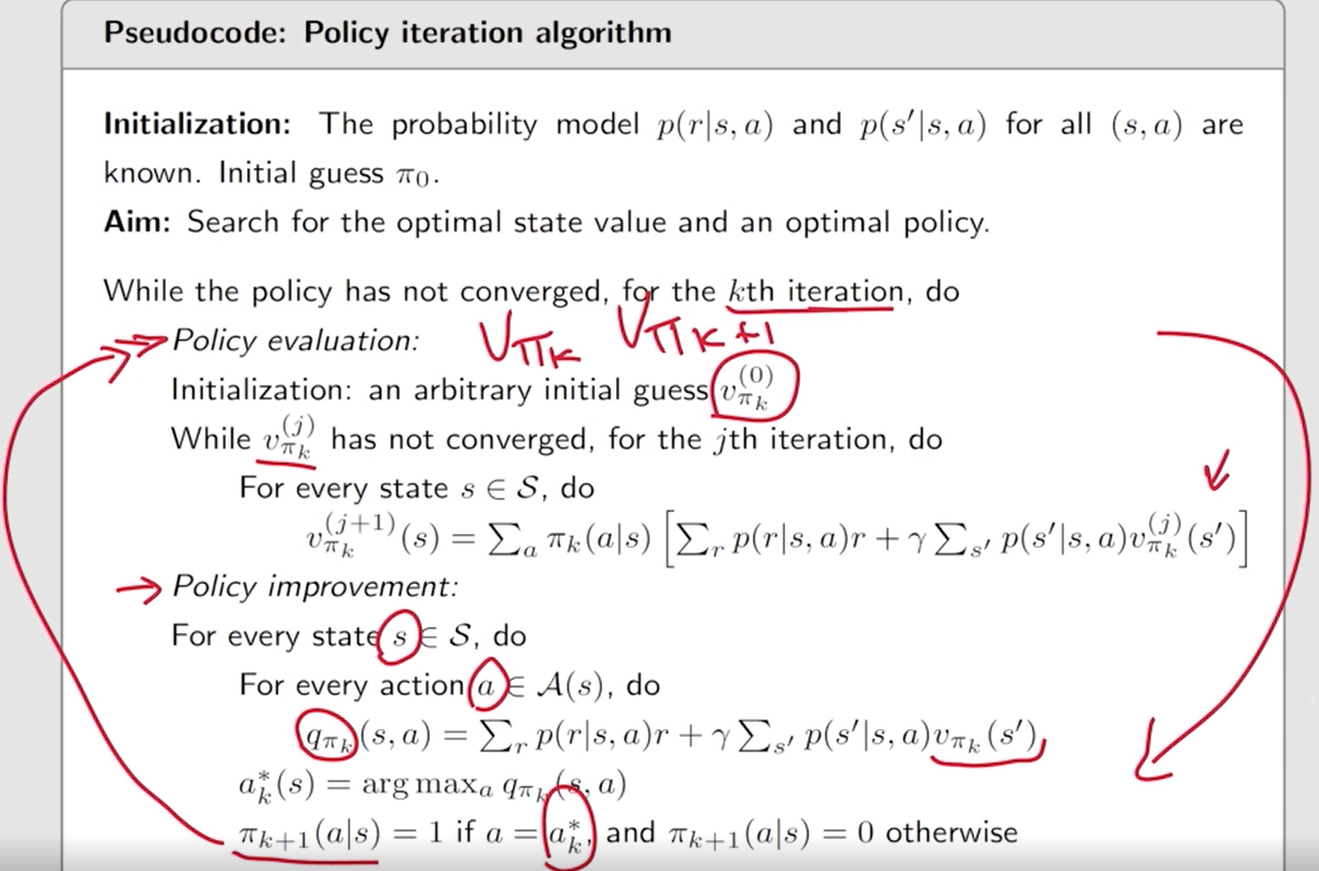
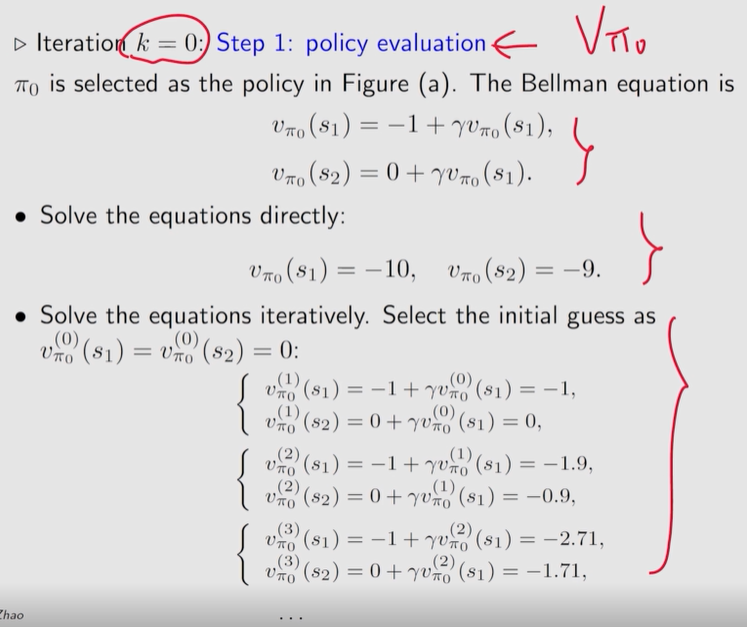
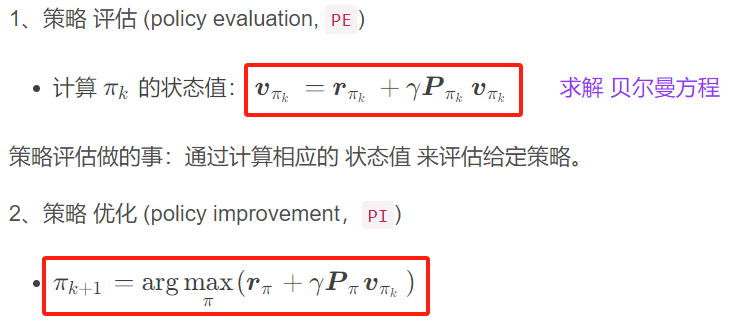
1、策略 评估 (policy evaluation, pe)
- 计算 π k \pi_k πk 的状态值: v π k = r π k + γ p π k v π k {\bm v}_{\pi_k}={\bm r}_{\pi_k}+\gamma {\bm p}_{\pi_k}{\bm v}_{\pi_k}~~~~~~~ vπk=rπk+γpπkvπk 求解 贝尔曼方程
策略评估做的事:通过计算相应的 状态值 来评估给定策略。
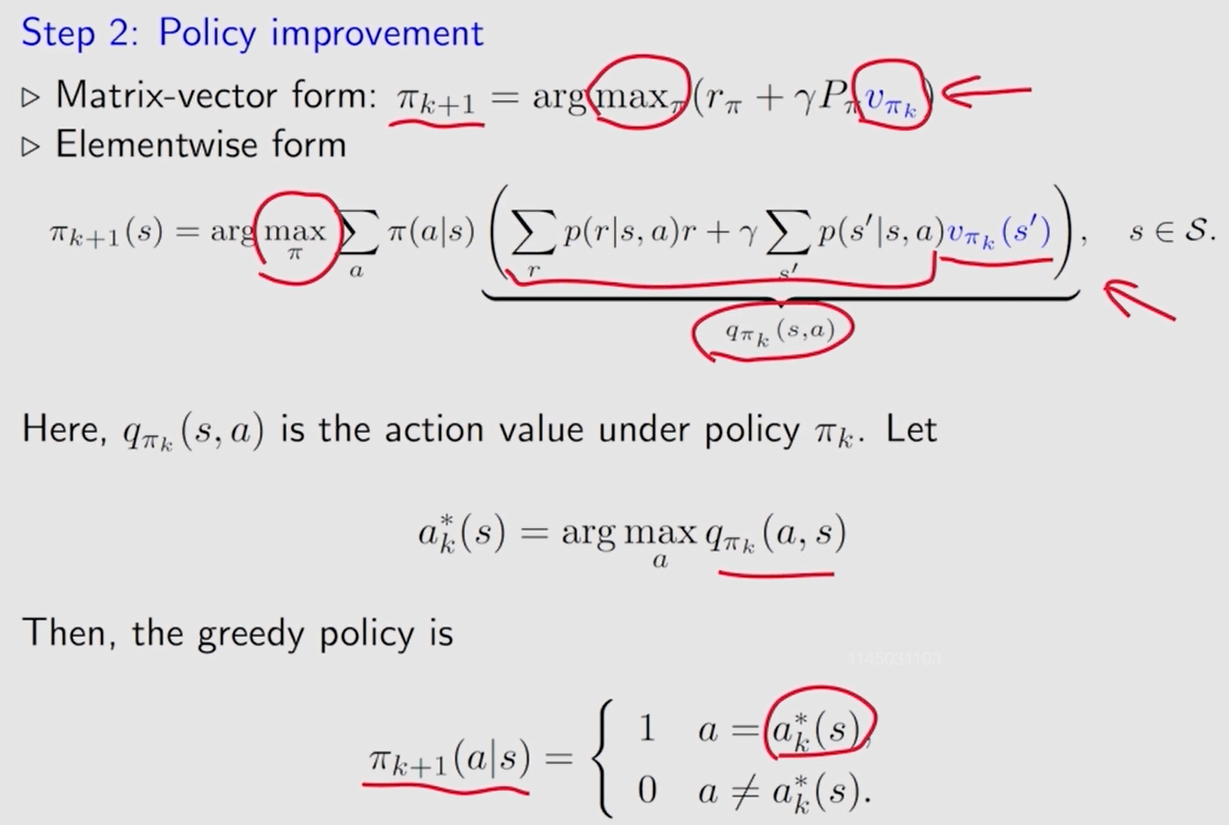
2、策略 优化 (policy improvement,pi)
- π k + 1 = arg max π ( r π + γ p π v π k ) \pi_{k+1}=\arg\max\limits_\pi({\bm r}_\pi+\gamma {\bm p}_\pi {\bm v}_{\pi_k}) πk+1=argπmax(rπ+γpπvπk)
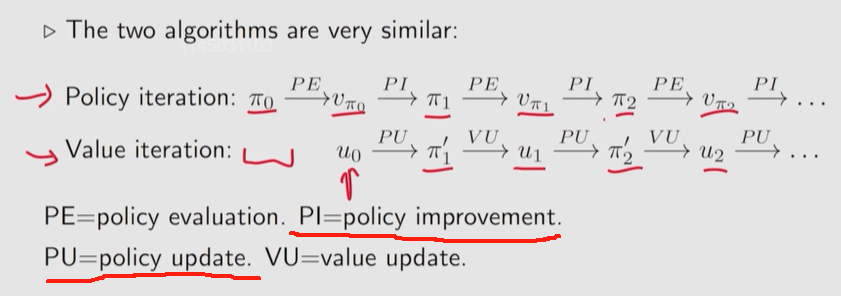
迭代流程
π 0 → p e v π 0 → p i π 1 → p e v π 1 → p i π 2 → p e v π 2 → p i . . . \pi_0\xrightarrow{pe}v_{\pi_0}\xrightarrow{pi}\pi_1\xrightarrow{pe}v_{\pi_1}\xrightarrow{pi}\pi_2\xrightarrow{pe}v_{\pi_2}\xrightarrow{pi}... π0pevπ0piπ1pevπ1piπ2pevπ2pi...
pe: 策略 评估
pi:策略 优化
现在处理以下几个问题:
q1:在策略评估步骤中,如何通过求解 bellman 方程得到状态值?
q2:在策略优化步骤中,为什么新策略
π
k
+
1
\pi_{k+1}
πk+1 优于
π
k
π_k
πk?
q3:为什么这样的迭代算法最终可以达到最优策略?
q4:这个策略迭代算法和之前的值迭代算法是什么关系?
q1:在策略评估步骤中,如何通过求解 bellman 方程得到状态值?
如何 获取 v π k v_{\pi_k} vπk
已知: v π k = r π k + γ p π k v π k {\bm v}_{\pi_k}={\bm r}_{\pi_k}+\gamma {\bm p}_{\pi_k}{\bm v}_{\pi_k} vπk=rπk+γpπkvπk
方法一: 矩阵求逆
v π k = ( i − γ p π k ) − 1 r π k {\bm v}_{\pi_k}=({\bm i}-\gamma {\bm p}_{\pi_k})^{-1}{\bm r}_{\pi_k} vπk=(i−γpπk)−1rπk
方法二: 迭代 ✔
v π k ( j + 1 ) = r π k + γ p π k v π k ( j ) , j = 0 , 1 , 2 , . . . {\bm v}_{\pi_k}^{(j+1)}={\bm r}_{\pi_k}+\gamma {\bm p}_{\pi_k}{\bm v}_{\pi_k}^{(j)}, ~~~j=0,1,2,... vπk(j+1)=rπk+γpπkvπk(j), j=0,1,2,...
策略迭代 是在策略评估步骤中嵌入另一个迭代算法的迭代算法!
q2:在策略优化步骤中,为什么新策略 π k + 1 \pi_{k+1} πk+1 优于 π k π_k πk?
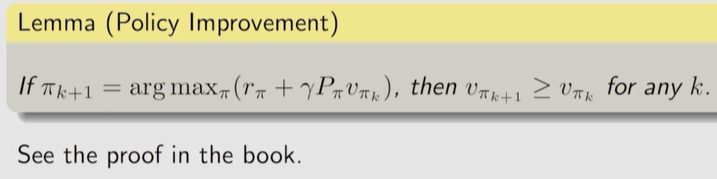
- 证明 1: 在策略优化步骤中,为什么新策略 π k + 1 \pi_{k+1} πk+1 优于 π k π_k πk? ~~ p73-
q3:为什么策略迭代算法最终可以找到最优策略?
由于每次迭代都会改进策略, 即
v π 0 ≤ v π 1 ≤ v π 2 ≤ ⋯ ≤ v π k ≤ ⋯ ≤ v ∗ \bm v_{\pi_0}\leq\bm v_{\pi_1}\leq\bm v_{\pi_2}\leq\cdots\leq\bm v_{\pi_k}\leq\cdots\leq\bm v^* vπ0≤vπ1≤vπ2≤⋯≤vπk≤⋯≤v∗
v π k \bm v_{\pi_k} vπk 不断减小并最终收敛。仍需证明 将收敛到 v ∗ \bm v^* v∗。
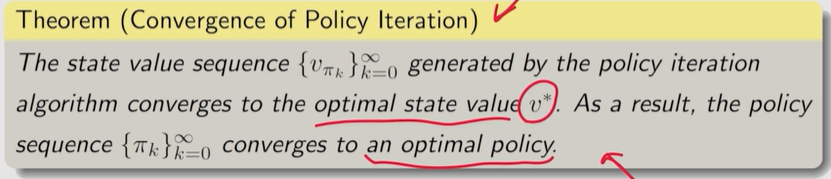
定理 4.1 (策略迭代的收敛性)。策略迭代算法生成的状态值序列 { v π k } k = 0 ∞ \{v_{\pi_k}\}_{k=0}^\infty {vπk}k=0∞ 收敛到最优状态值 v ∗ v^* v∗。因此,策略序列 { π k } k = 0 ∞ \{\pi_k\}_{k=0}^\infty {πk}k=0∞ 收敛到最优策略。
- 证明 2: 证明策略迭代会收敛到 最优策略 p75
证明的思路是证明 策略迭代算法 比 值迭代算法 收敛得更快。
如果 策略迭代 和 值迭代 从相同的初始猜测开始,由于 策略迭代 算法的收敛性,策略迭代 将比 值迭代 收敛得更快。
q4:这个策略迭代算法和之前的值迭代算法是什么关系?
值迭代 和 策略迭代 是 截断策略迭代 的两个极端, 后续将进一步说明。
——————————————————
如何 实现 策略迭代算法?
策略迭代 算法:
目标: 搜索 最优状态值 和 最优策略
策略迭代算法 生成的中间值是是 状态值。 因为这些值是当前策略的 bellman 方程的解。
4.2.3 例子
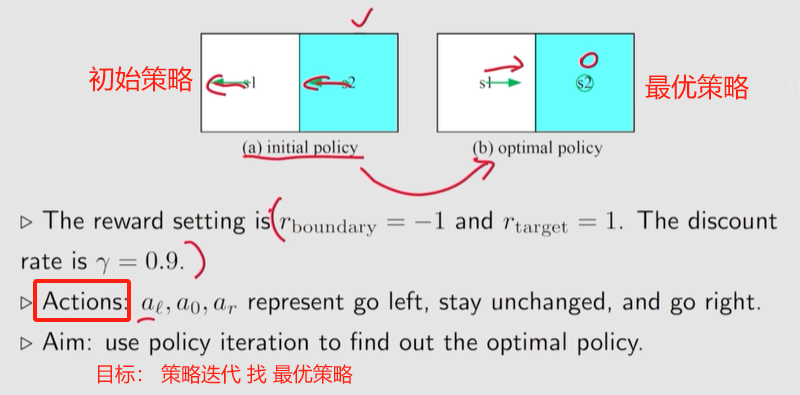
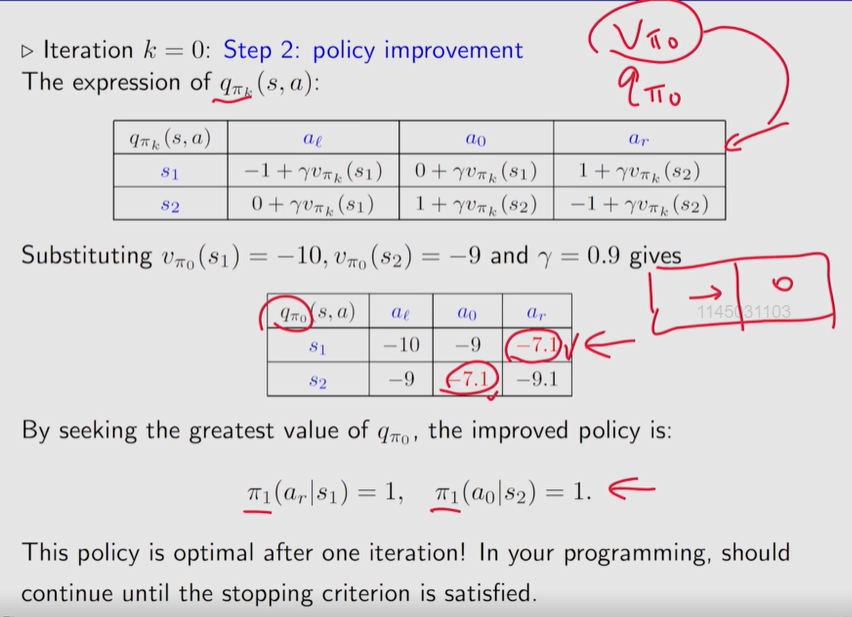
一个 示例 p79
发现一个有趣的现象:接近目标的状态 的策略 先变好, 远离目标的状态的策略会后变好。
在某一个状态, 选择 greedy action 时, 严重依赖于 其它状态的策略。
若其它状态的策略是不好的, 此时虽然选一个 动作值 (
q
q
q) 最大的 动作, 可能意义不大;
如果 其它状态 有能够到达目标区域 的策略, 选择变到那个状态,也能到达目标区域, 得到正的 reward。
当某个状态周围 没有状态 能够到达 目标区域 的时候, 这个状态无法到达目标区域。
当周围有状态能够到达目标区域的策略时, 新的策略也能到达目标区域。
4.3 截断策略迭代
值迭代 算法和 策略迭代 算法是截断策略迭代算法的两种特殊情况。
!!每一步的等号右侧 都有的: r + γ p v {\bm r} +\gamma {\bm p} {\bm v} r+γpv
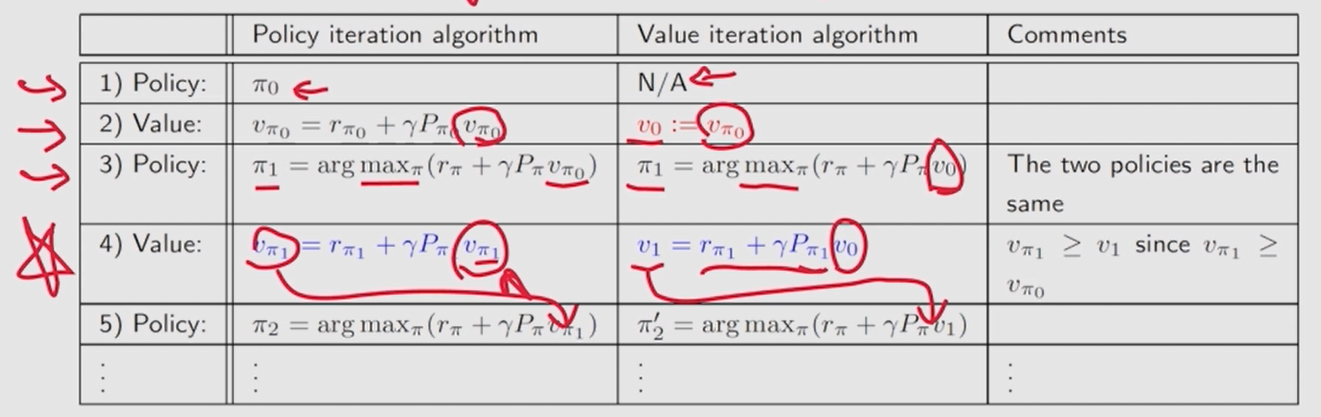
从相同的初始条件开始。
前三个步骤是相同的。
第四步就不一样了:
- 策略迭代,求解 v π 1 = r π 1 + γ p π 1 v π 1 v_{π_1} = r_{π_1} + γp_{\pi_1}v_{\pi_1} vπ1=rπ1+γpπ1vπ1 需要一个迭代算法 ( 迭代无数次 )
- 值迭代, v 1 = r π 1 + γ p π 1 v 0 v_1 = r_{π_1} + \gamma p_{π_1}v_0 v1=rπ1+γpπ1v0 是一步迭代。
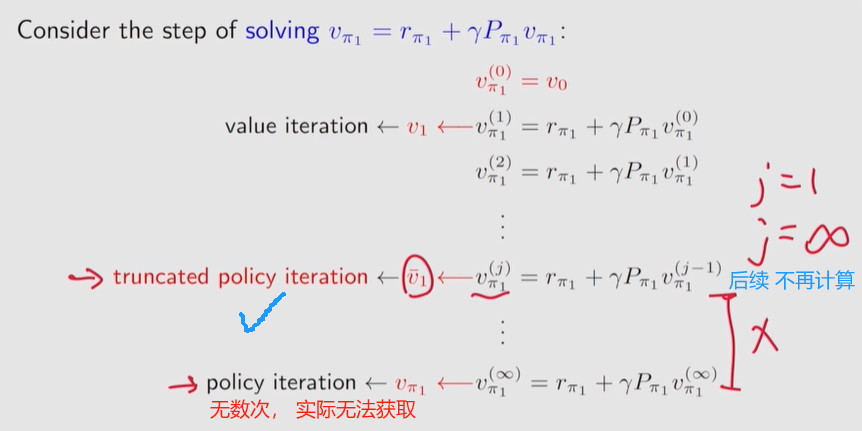
每步求解 v \bm v v 值时, 值迭代 需要一步, 策略迭代需要无穷步,迭代次数取中间值如何呢?
值迭代算法:计算一次。
策略迭代算法:计算无限次迭代。
截断策略迭代算法:计算一个有限次迭代(例如
j
j
j )。从
j
j
j 到
∞
\infty
∞ 的其余迭代被截断。
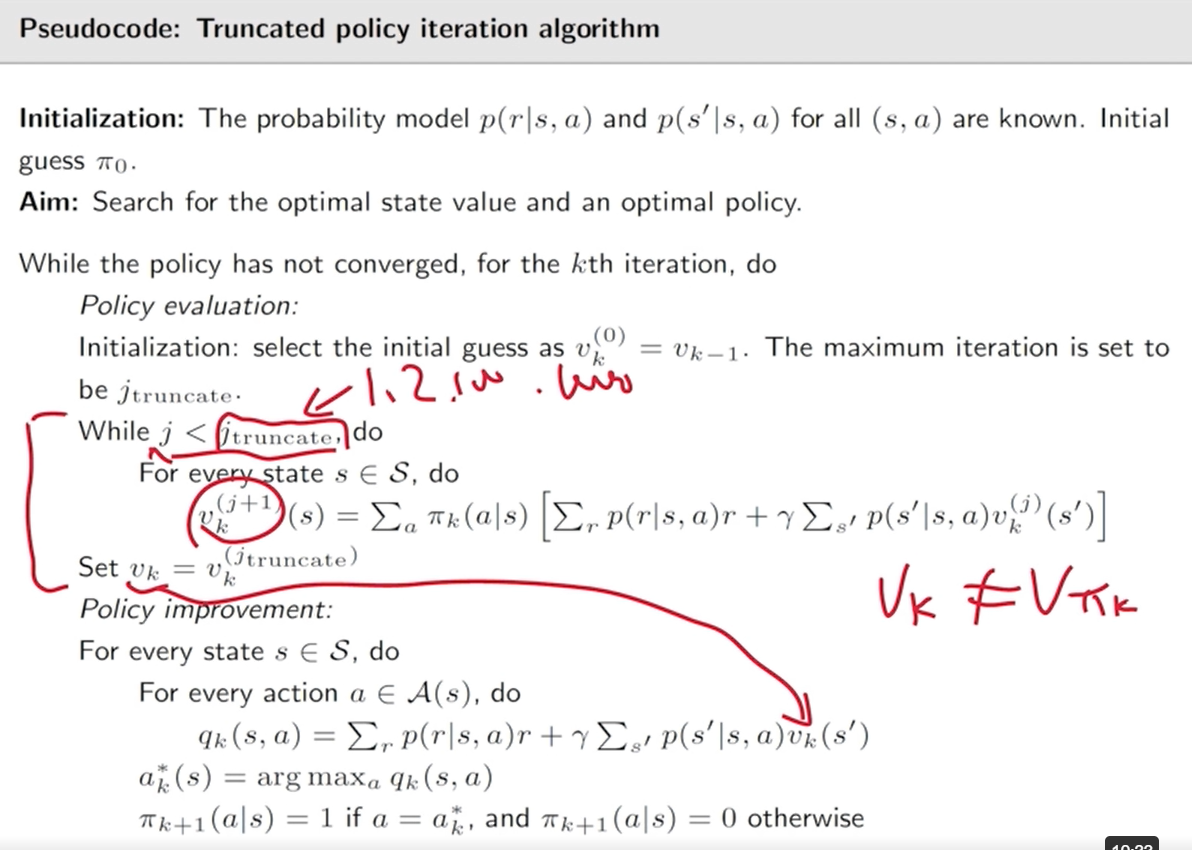
算法中的 v k v_k vk 和 v k ( j ) v_k^{(j)} vk(j) 不是状态值,是真实状态值的近似值,因为在策略评估步骤中只执行有限次迭代。
只有当我们在 策略评估 步骤中运行无限次迭代时,才能获得真实的状态值。
截断策略迭代 会不会 结束迭代时是一个 发散的结果?
- 证明。参考 电子书 pdf p83
——————————————
证明: 截断策略迭代算法 的收敛性。
因为
v π k ( j ) = r π k + γ p π k v π k ( j − 1 ) v_{\pi_k}^{(j)}=r_{\pi_k}+\gamma p_{\pi_k}v_{\pi_k}^{(j-1)} vπk(j)=rπk+γpπkvπk(j−1)
v π k ( j + 1 ) = r π k + γ p π k v π k ( j ) v_{\pi_k}^{(j+1)}=r_{\pi_k}+\gamma p_{\pi_k}v_{\pi_k}^{(j)} vπk(j+1)=rπk+γpπkvπk(j)
则
v π k ( j + 1 ) − v π k ( j ) = γ p π k ( v π k ( j ) − v π k ( j − 1 ) ) = ⋯ = γ j p π k j ( v π k ( 1 ) − v π k ( 0 ) ) v_{\pi_k}^{(j+1)}-v_{\pi_k}^{(j)}=\gamma p_{\pi_k}(v_{\pi_k}^{(j)}-v_{\pi_k}^{(j-1)})=\cdots=\gamma^j p^j_{\pi_k}(v_{\pi_k}^{(1)}-v_{\pi_k}^{(0)}) vπk(j+1)−vπk(j)=γpπk(vπk(j)−vπk(j−1))=⋯=γjpπkj(vπk(1)−vπk(0))
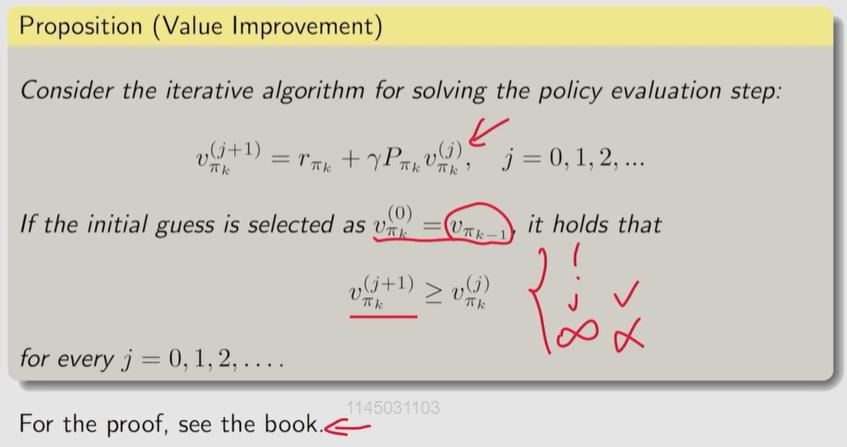
v π k ( 0 ) = v π k − 1 v_{\pi_k}^{(0)}=v_{\pi_{k-1}}~~~~ vπk(0)=vπk−1 上一轮迭代的结果
v π k ( 1 ) = r π k + γ p π k v π k ( 0 ) = r π k + γ p π k v π k − 1 ≥ r π k − 1 + γ p π k − 1 v π k − 1 ① = v π k − 1 = v π k ( 0 ) \begin{aligned}v_{\pi_k}^{(1)}&=r_{\pi_k}+\gamma p_{\pi_k}v_{\pi_k}^{(0)}\\ &=r_{\pi_k}+\gamma p_{\pi_k}\textcolor{blue}{v_{\pi_{k-1}}}\\ &\geq r_{\pi_{\textcolor{blue}{{k-1}}}}+\gamma p_{\pi_{\textcolor{blue}{{k-1}}}}\textcolor{blue}{v_{\pi_{k-1}}}~~~~~~~~\textcolor{blue}{①}\\ &=v_{\pi_{k-1}}\\ &=v_{\pi_k}^{(0)}\end{aligned} vπk(1)=rπk+γpπkvπk(0)=rπk+γpπkvπk−1≥rπk−1+γpπk−1vπk−1 ①=vπk−1=vπk(0)
则 v π k ( j + 1 ) ≥ v π k ( j ) v_{\pi_k}^{(j+1)}\geq v_{\pi_k}^{(j)} vπk(j+1)≥vπk(j)。
① π k = arg max π ( r π + γ p π v π k − 1 ) \pi_k=\arg\max\limits_\pi(r_\pi+\gamma p_\pi v_{\pi_{k-1}}) πk=argπmax(rπ+γpπvπk−1)
——————————————
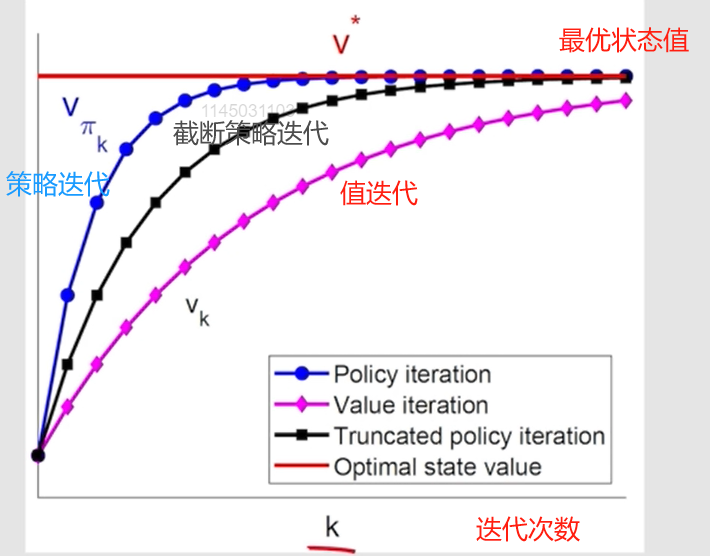
相比于策略迭代算法,截断的策略迭代算法在策略评估步骤中只需要有限次数的迭代,因此计算效率更高。与值迭代相比,截断策略迭代算法可以在策略评估步骤中多运行几次迭代,从而加快收敛速度。
pl 【策略迭代】 的收敛性证明是基于 vi 【值迭代】 的收敛性证明。由于 vi 收敛,得到 pi 收敛。
小结:

4.5
q:值迭代算法一定能找到最优策略吗?
是的。值迭代正是上一章求解 bellman 最优性方程的 压缩映射定理 所提出的算法。利用 压缩映射定理 保证了算法的收敛性。
model-based vs model-free
虽然本章介绍的算法可以找到最优策略,但由于它们需要系统模型,通常被称为动态规划算法而不是强化学习算法。
强化学习算法可以分为两类:基于模型的和免模型的。
这里,“基于模型的”并不是指系统模型的需求。相反,基于模型的强化学习使用数据来估计系统模型,并在学习过程中使用该模型。相比之下,免模型强化学习在学习过程中不涉及模型估计。
——————
习题
值迭代、策略迭代、截断策略迭代
值迭代算法中间产生的值不一定对应某些策略的状态值,这些只是产生的一些中间过程的数值,没有特别的含义。
压缩映射定理给出的算法 实际是 值迭代算法。
策略迭代算法 同时获得 最优状态值 和 最优策略。 【策略评估 需要计算状态值】
补充
证明 1: 在策略优化步骤中,为什么新策略 π k + 1 \pi_{k+1} πk+1 优于 π k π_k πk? ~~ p73-
证明 2: 证明策略迭代会收敛到 最优策略 p75
定理 4.1 (策略迭代的收敛性)。策略迭代算法生成的状态值序列 { v π k } k = 0 ∞ \{v_{\pi_k}\}_{k=0}^\infty {vπk}k=0∞ 收敛到最优状态值 v ∗ v^* v∗。因此,策略序列 { π k } k = 0 ∞ \{\pi_k\}_{k=0}^\infty {πk}k=0∞ 收敛到最优策略。
证明的思路是证明 策略迭代算法 比 值迭代算法 收敛得更快。
——————————
证明:
为了 证明
{
v
π
k
}
k
=
0
∞
\{v_{\pi_k}\}_{k=0}^\infty
{vπk}k=0∞ 的收敛性, 引入由以下式子生成的 另一个序列
{
v
k
}
k
=
0
∞
\{v_k\}_{k=0}^\infty
{vk}k=0∞ 。
v k + 1 = f ( v k ) = max π ( r π + γ p π v k ) v_{k+1}=f(v_k)=\max\limits_\pi(r_\pi+\gamma p_\pi v_k) vk+1=f(vk)=πmax(rπ+γpπvk)
这个迭代算法 正是 值迭代算法,则给定任意初始值 v 0 v_0 v0, v k v_k vk 收敛到 v ∗ v^* v∗。
k = 1 k=1 k=1, 对任意 π 0 \pi_0 π0, 有 v π 0 ≥ v 0 v_{\pi_0}\geq v_0 vπ0≥v0。
通过 归纳法 证明 对任意 k k k, 有 v k ≤ v π k ≤ v ∗ v_k\leq v_{\pi_k}\leq v^* vk≤vπk≤v∗。
对 k ≥ 0 k\geq0 k≥0, 假设 v π k ≥ v k v_{\pi_k}\geq v_k vπk≥vk。
用到的一些中间式:
①
v
π
k
+
1
≥
v
π
k
v_{\pi_{k+1}}\geq v_{\pi_k}~~
vπk+1≥vπk 【上面的 证明 1 已证。即 策略优化后的策略的状态值 比之前的大】 ,
p
π
k
+
1
≥
0
p_{\pi_{k+1}}\geq0
pπk+1≥0
② 令
π
k
′
=
arg
max
π
(
r
π
+
γ
p
π
v
k
)
{\textcolor{blue}{{\pi_k^\prime}}}=\arg \max\limits_\pi(r_\pi+\gamma p_\pi v_k)
πk′=argπmax(rπ+γpπvk)
③
π
k
+
1
=
arg
max
π
(
r
π
+
γ
p
π
v
π
k
)
\pi_{k+1}=\arg \max\limits_\pi(r_\pi+\gamma p_\pi v_{\pi_k})
πk+1=argπmax(rπ+γpπvπk)
对于 k + 1 k + 1 k+1 有:
v π k + 1 − v k + 1 = ( r π k + 1 + γ p π k + 1 v π k + 1 ) − max π ( r π + γ p π v k ) ≥ ( r π k + 1 + γ p π k + 1 v π k ) − max π ( r π + γ p π v k ) ① = ( r π k + 1 + γ p π k + 1 v π k ) − ( r π k ′ + γ p π k ′ v k ) ② ≥ ( r π k ′ + γ p π k ′ v π k ) − ( r π k ′ + γ p π k ′ v k ) ③ = γ p π k ′ ( v π k − v k ) \begin{aligned}v_{\pi_{k+1}}-v_{k+1}&=(r_{\pi_{k+1}}+\gamma p_{\pi_{k+1}}v_{\pi_{k+1}})-\max\limits_\pi(r_\pi+\gamma p_\pi v_k)\\ &\geq(r_{\pi_{k+1}}+\gamma p_{\pi_{k+1}}v_{\pi_{\textcolor{blue}{k}} })-\max\limits_\pi(r_\pi+\gamma p_\pi v_k)~~~~~~~~~~\textcolor{blue}{①}\\ &=(r_{\pi_{k+1}}+\gamma p_{\pi_{k+1}}v_{\pi_k })-(r_{\textcolor{blue}{{\pi_k^\prime}}}+\gamma p_{\textcolor{blue}{{\pi_k^\prime}}}v_k)~~~~~~~~~~\textcolor{blue}{②}\\ &\geq(r_{\textcolor{blue}{{\pi_k^\prime}}}+\gamma p_{\textcolor{blue}{{\pi_k^\prime}}}v_{\pi_k })-(r_{\textcolor{blue}{{\pi_k^\prime}}}+\gamma p_{\textcolor{blue}{{\pi_k^\prime}}}v_k)~~~~~~~~~~\textcolor{blue}{③}\\ &=\gamma p_{\pi_k^\prime}(v_{\pi_k}-v_k)\end{aligned} vπk+1−vk+1=(rπk+1+γpπk+1vπk+1)−πmax(rπ+γpπvk)≥(rπk+1+γpπk+1vπk)−πmax(rπ+γpπvk) ①=(rπk+1+γpπk+1vπk)−(rπk′+γpπk′vk) ②≥(rπk′+γpπk′vπk)−(rπk′+γpπk′vk) ③=γpπk′(vπk−vk)
因为 v π k − v k ≥ 0 v_{\pi_k}-v_k\geq0 vπk−vk≥0 且 p π k ′ p_{\pi_k^\prime} pπk′ 非负。
则 γ p π k ′ ( v π k − v k ) ≥ 0 \gamma p_{\pi_k^\prime}(v_{\pi_k}-v_k)\geq0 γpπk′(vπk−vk)≥0
v π k + 1 − v k + 1 ≥ 0 v_{\pi_{k+1}}-v_{k+1}\geq0 vπk+1−vk+1≥0
归纳得到, 对任意
k
>
0
k > 0
k>0,
v
k
≤
v
π
k
≤
v
∗
v_k\leq v_{\pi_k}\leq v^*
vk≤vπk≤v∗。
而
v
k
v_k
vk 收敛到
v
∗
v^*
v∗, 由夹逼准则可得,
v
π
k
v_{\pi_k}
vπk 也收敛到
v
∗
v^*
v∗


发表评论