一. 配置及更换最佳软件源(总的软件源)
笔者亲身经历,阿里云下载非常快,报错少。因此,换成阿里云服务器。
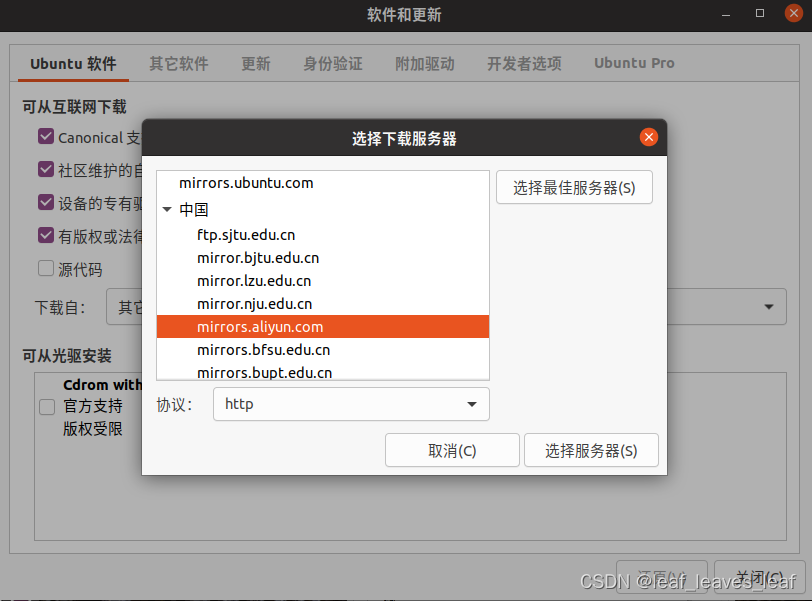
1. 打开软件和更新

2. 选择下载服务器
在“下载自”下拉列表中,选择阿里云服,点击选择服务器。
2. 重新载入软件列表
点击右下角的关闭按钮,重新载入软件列表。

二. 更换ros软件源
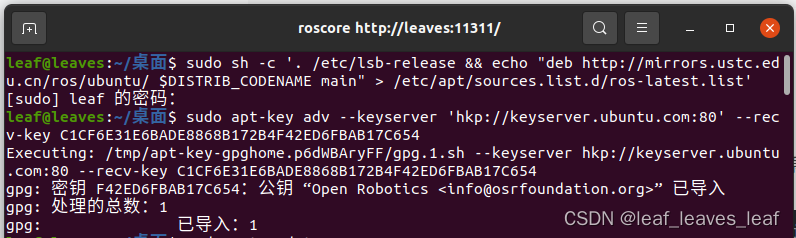
1. 添加ros安装源
将以下命令复制到 ubuntu 的终端执行(这是中科大的安装源)
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $distrib_codename main" > /etc/apt/sources.list.d/ros-latest.list'
2. 设置密钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key c1cf6e31e6bade8868b172b4f42ed6fbab17c654
成功后会显示如下界面
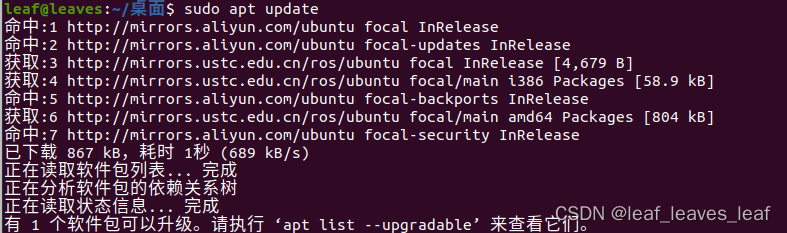
3. 更新软件源
将以下命令复制到 ubuntu 的终端进行。
sudo apt update
成功后会显示如下界面
三. 正式安装ros
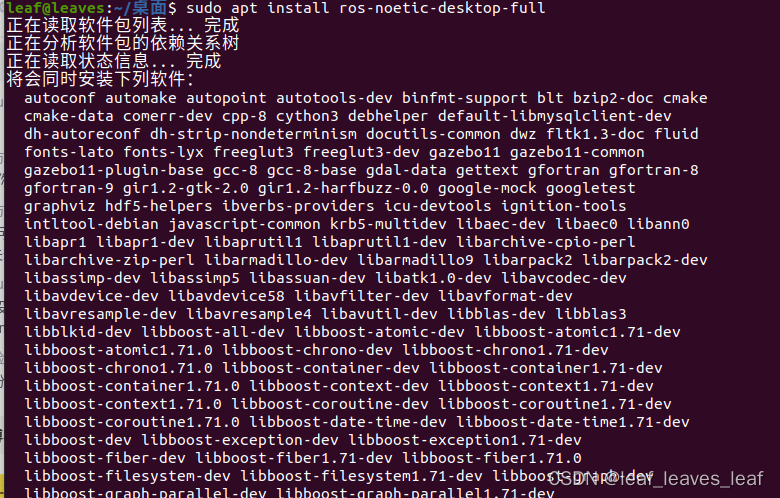
1. 安装ros
安装所需类型的 ros:ros 多个类型:desktop-full、desktop、ros-base。这里介绍较为常用的desktop-full(官方推荐)安装: ros, rqt, rviz, robot-generic libraries, 2d/3d simulators, navigation and 2d/3d perception
将以下命令复制到 ubuntu 的终端进行。
sudo apt install ros-noetic-desktop-full
这一步耗时比较长,会安装很多东西。
安装完成后的界面如下(我又输入了一边命令,确认已经是最新版了)
2. 初始化 rosdep
输入以下命令,初始化 rosdep
sudo rosdep init
此时,若正确初始化,则应该显示如下界面

笔者在这里出现了以下两种错误(若大家没有出现错误,这一步就算完成了,可以看下一步的操作)
(1)错误1:找不到命令
此时我报错:找不到命令
![]()
解决办法:输入以下指令
sudo apt install python3-rosdep2
下载完成后,我再次输入 sudo rosdep init,出现了错误2
(2)错误2:error: default sources list file already exists: /etc/ros/rosdep/sources.list.d/20-default.list please delete if you wish to re-initialize

解决办法:输入以下指令
sudo rm /etc/ros/rosdep/sources.list.d/20-default.list
之后,我再次输入 sudo rosdep init ,即可出现正确的提示。

3. 更新 rosdep
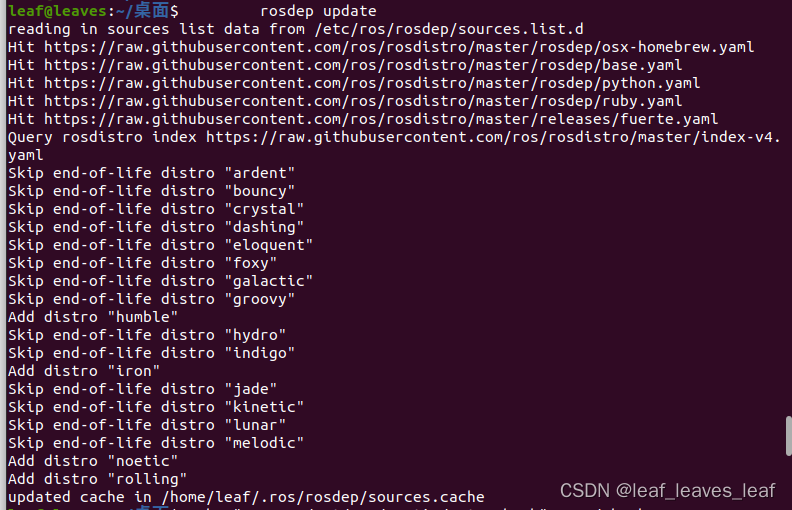
输入以下命令
rosdep update这一步更新界面如下
4. 设置环境变量
设置环境变量,方便在任意终端下使用 ros
输入以下命令配置环境变量
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
再输入以下命令,运行该脚本让环境变量生效
source ~/.bashrc
![]()
5. 安装 rosinstall
sudo apt install python3-rosinstall python3-rosinstall-generator python3-wstool
安装界面如下:
6. 用 roscore 命令验证 ros 是否安装成功
输入以下命令
roscore
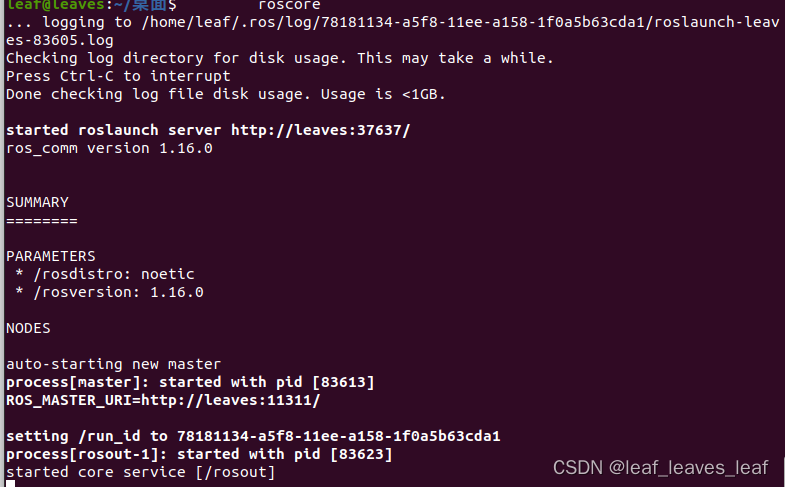
若运行成功,则界面如下(若大家没有出现错误,这一步就算完成了,可以看下一步的操作)
但此时我出现了如下2种错误
(1)错误1:command ‘roscore’ not found, but can be installed with:sudo apt install python3-roslaunch

解决办法:
按照错误提示运行如下命令:
sudo apt install python3-roslaunch
此时我再次输入 roscore,报了第二个错误:
(2)错误2:
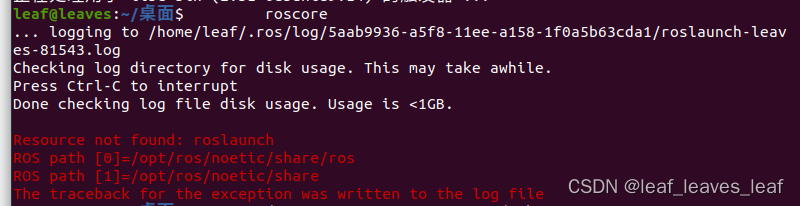
这个错误说明之前的安装没有安装全
解决办法:输入如下命令,把没安装的再安装一下
sudo apt install ros-noetic-desktop-full
安装完成后,再次输入 roscore,即可成功,成功界面如下:
7. 启动海龟仿真器
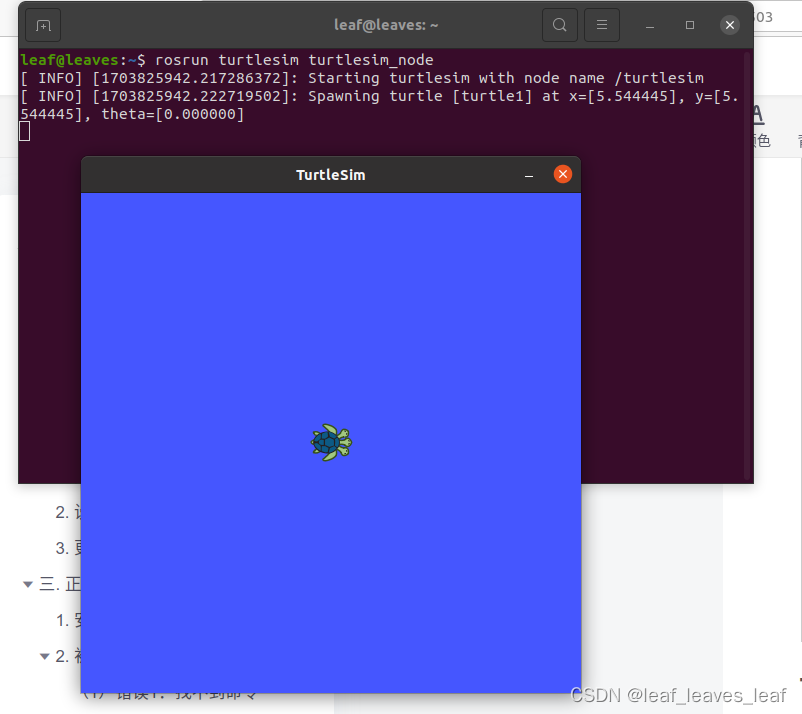
在刚才的 roscore 成功运行的前提下(不要关闭刚才运行 roscore 的终端窗口),按 ctri+alt+t 打开一个新的终端,输入以下命令:
rosrun turtlesim turtlesim_node
可以启动海龟仿真器如下:
再按 ctri+alt+t 打开一个新的终端,输入以下命令:
rosrun turtlesim turtle_teleop_key
打开界面如下: 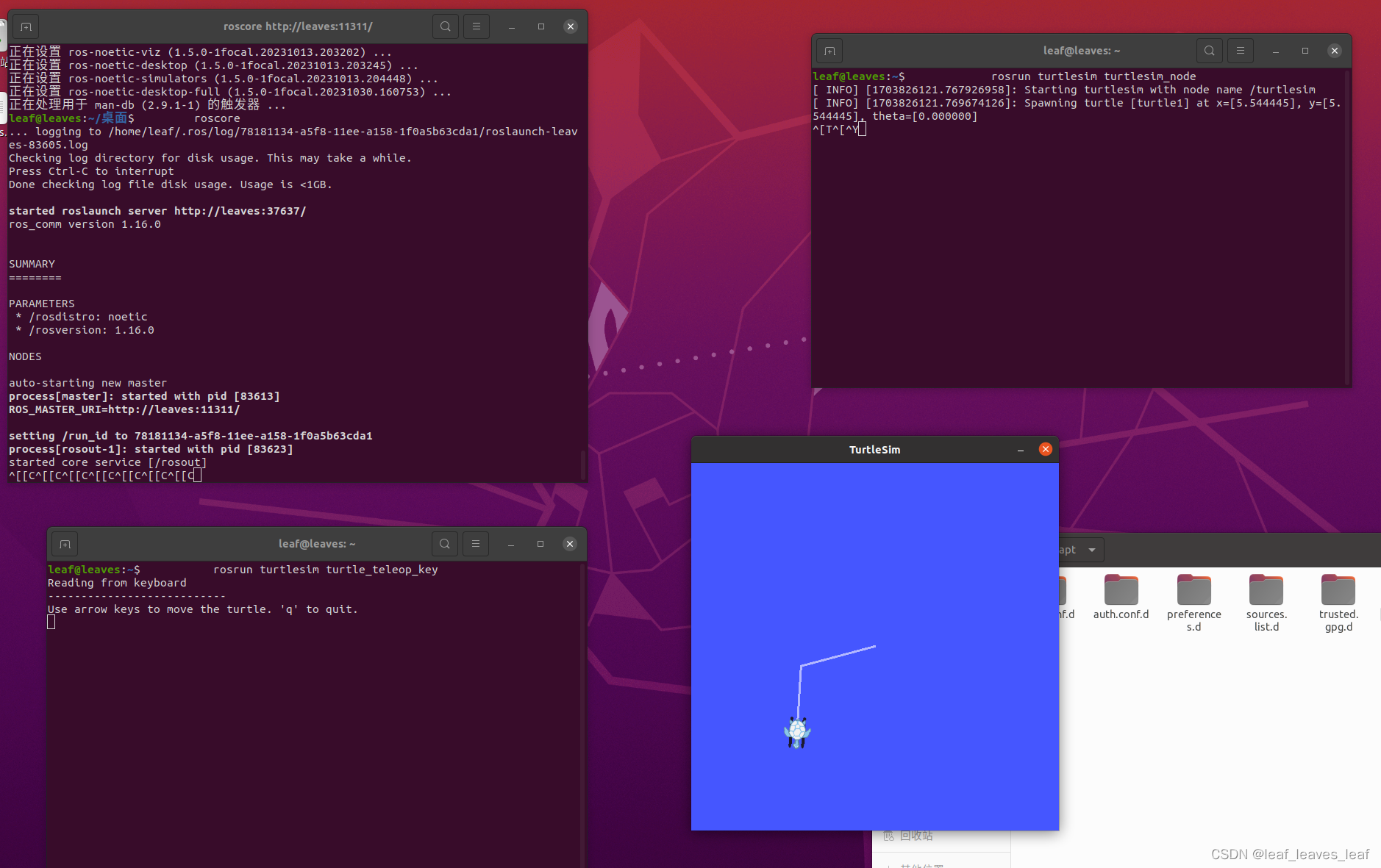
这时候你按键盘上的 ↑ ↓ ← →键就可以控制小海龟移动了
到此,ros安装完毕!
四. 补充资源链接:
1. ros与操作系统版本对应关系:
ros与操作系统版本对应关系_ros版本与ubuntu对应版本-csdn博客
2. 安装ros详细教程:



发表评论