石头扫拖机器人t7s系列最大变化之一就是支持自动集尘,故此我们也同时体验了石头首款自动集尘充电座。

其主要是由集尘座和和集尘桶构成,左边的桶为风机和滤网,右边的桶为尘桶,集尘桶还可以通过手提方式取下,方便进行垃圾清理。两个桶并排站立,另外集尘座顶部的出风口还做了下沉式的栅格设计。
三、清洁:声波震动擦地+智能升降!只此一家
从“扫地机器人”更名到“扫拖机器人”,顾名思义,可想而知此次的石头扫拖机器人t7s plus在“拖地”方面的升级幅度之高。
果不其然,此作支持升降拖布、震动擦地以及电控出水功能,这也让其成为了目前市面上唯一一款具备声波震动擦地和智能升降擦地系统的扫拖机器人。
——震动擦地
先说震动擦地,石头扫拖机器人t7s plus的的震动擦地功能是通过高性能无刷马达带动拖布工作来实现的,目前已经支持了3种震动模式——1650次/分28hz的弱档、2300次/分38hz的中档、3000次/分50hz)的强档,均为高频震动负责清理顽固污渍。

值得一提的是,石头扫拖机器人t7s plus的拖布也有相当大幅度的升级,其采用的是涤纶和锦纶材质,祛污、纳污性较佳,比我们所体验过的前代作品使用地拖布更厚一些,吸水性和弹性明显更强一些。
——升降擦地
支持震动擦地的同时,石头扫拖机器人t7s plus还针对性地解决了一个曾让“强迫症完美主义者”十分头疼的问题:机器回充时紧贴地面的脏拖布会二次污染本来已经清理干净的地面,并且湿漉漉的拖布长期贴着地面也很容易滋生细菌产生异味,并且泡坏地毯和木质地板。
对此,石头扫拖机器人t7s plus的方案是采用智控升降擦地模组,这是由马达及齿轮箱驱动滑轮和拉索共同组成以实现自主升降的机械结构,其中升降拉索由304不锈钢细钢绳制成,数据显示其可以经过30多万次的弯折寿命测试,牢固可靠。

这样一来,当石头扫拖机器人t7s plus底部的超声波传感器扫描到机器位于地毯上时(超声波在不同质地的地面上回声表现不同),擦地模组就会自动升高5mm,使拖布离开地面,避免湿拖布留下水渍。
我们还注意到,在app设置中,石头扫拖机器人t7s plus还针对地毯清洁提供了自定义设置功能,用户可以根据需要自主选择清洁地面时是否需要规避地毯以及是否需要对地毯进行湿拖。

——全向浮动主刷
在石头扫拖机器人t7s plus当中,还有一项升级颇大之处,那就全向浮动主刷。
顾名思义,它可以实现上下左右的浮动,采用了四连杆的结构设计,更容易贴合地面。主刷材质也从软胶+毛刷的材质改为了tpu胶刷。
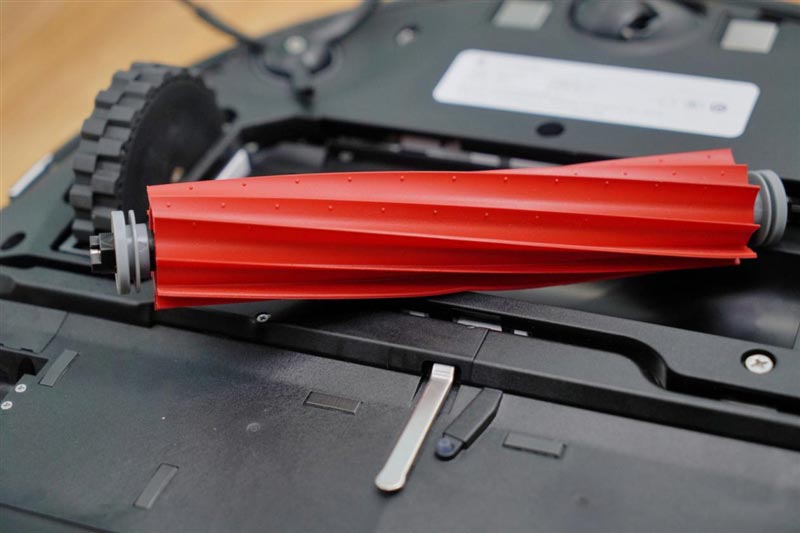
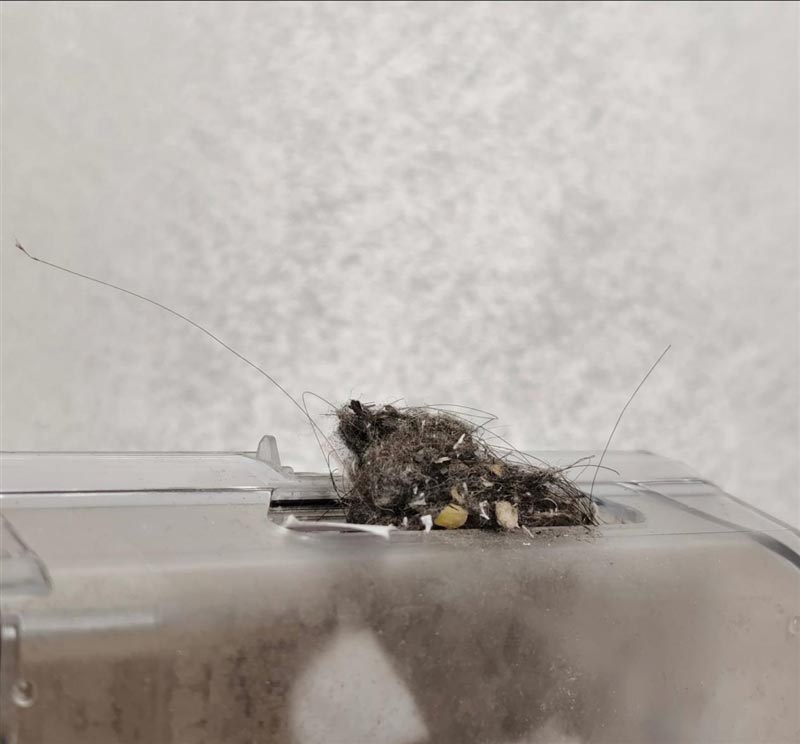
tpu胶刷带来的较大改变就是不容易被地面毛发缠绕,特别是其表面还拥有5长5短的设计来保证风压及除尘效果。
实测当中,笔者特地找来一些细线模拟毛发效果,可以看到其可轻松被尽数吸入尘盒,底部的胶刷,其表面更是没有被一根细线缠绕。
需要清理主刷的时候,旋下主刷两端圆圈卡扣即可轻松处理毛发,不需要额外使用小鸟刀了。
四、导航避障:3d结构光的首次尝试 再不横冲直撞
石头扫地机器人在导航避障方面一直都在探索不同的方案——从早年以lds激光导航避障为主的方案升级到t7 pro身上应用的lds激光雷达+双目方案,到了石头扫地机器人t7s plus,我们体验到了全新的ai结构光reactive 3d避障。
它主要依靠3d结构光进行工作,这是一种主动光学测距方案,由发射端和接收端两部分组成。
这种方案的精度比较高,通常会要求结构光的发射端不能够包含编码的光斑,然后由接收端捕获投射出的光斑,根据光点的形变计算距离。
更细分来看,石头扫拖机器人t7s plus选择的3d双线结构光,采用双线结构光替代传统红外光源,能够实现远距离测量。

一般而言,单纯线激光无法有效分辨门槛等低矮障碍物,无法正确采取“跨过”还是“避开”。而且,若是简单应用3d结构光对物体进行避障,粗暴过度避障必然会影响扫地机器人的清扫覆盖率。
为此,石头扫拖机器人t7s plus采用3d双线结构光主动式测距的同时,还融合了lds 激光测距、超声波地毯识别、高精度沿墙传感器等多传感器数据结合ai算法,能够采取正确的避障策略,智能判断是避障还是穿越,规避因为过度避障而导致的漏扫问题。
值得一提的是,在暗光环境下,由于线激光模组自带激光源进行探测,无需额外补光。对于白墙等缺少轮廓信息的障碍物探测,其能够依靠传感器捕捉的激光回波位置计算深度信息,不受光照变化或物体纹理影响。

在测试过程当中,基于这套主动测距的方案,石头扫拖机器人t7s plus对于日常生活当中的常见障碍物,在传感器扫描探测后能够配合避障算法确定不同的避障距离:
对于大量家庭常见障碍物体,如体重秤、电源线和拖鞋、门槛和地毯等物体,其避障距离大多都在2cm以内。
而且在清扫时,其探测到前方有墙或障碍物时,会在离墙或障碍物大概 1cm时转身规避,保护家具和踢脚线,减少碰撞产生磨损的情况。

在避障方面,石头扫拖机器人t7s plus展现出来的能力还是“立体”的——不仅能对地面的障碍物进行避障,对于沙发和床等8-10cm之间容易卡住扫地机器人的家具,其也能通过3d结构光进行高度测量辅助。

而且为了防止漏扫,石头扫拖机器人t7s plus在进入高度临界的环境时,行走策略会切换为保守模式,当确认无法清扫时,才会进行避障。
如果遇到需要脱困越障的场景,石头扫拖机器人t7s plus的越障动作也是根据3d结构光的测距信息而有选择的施展。
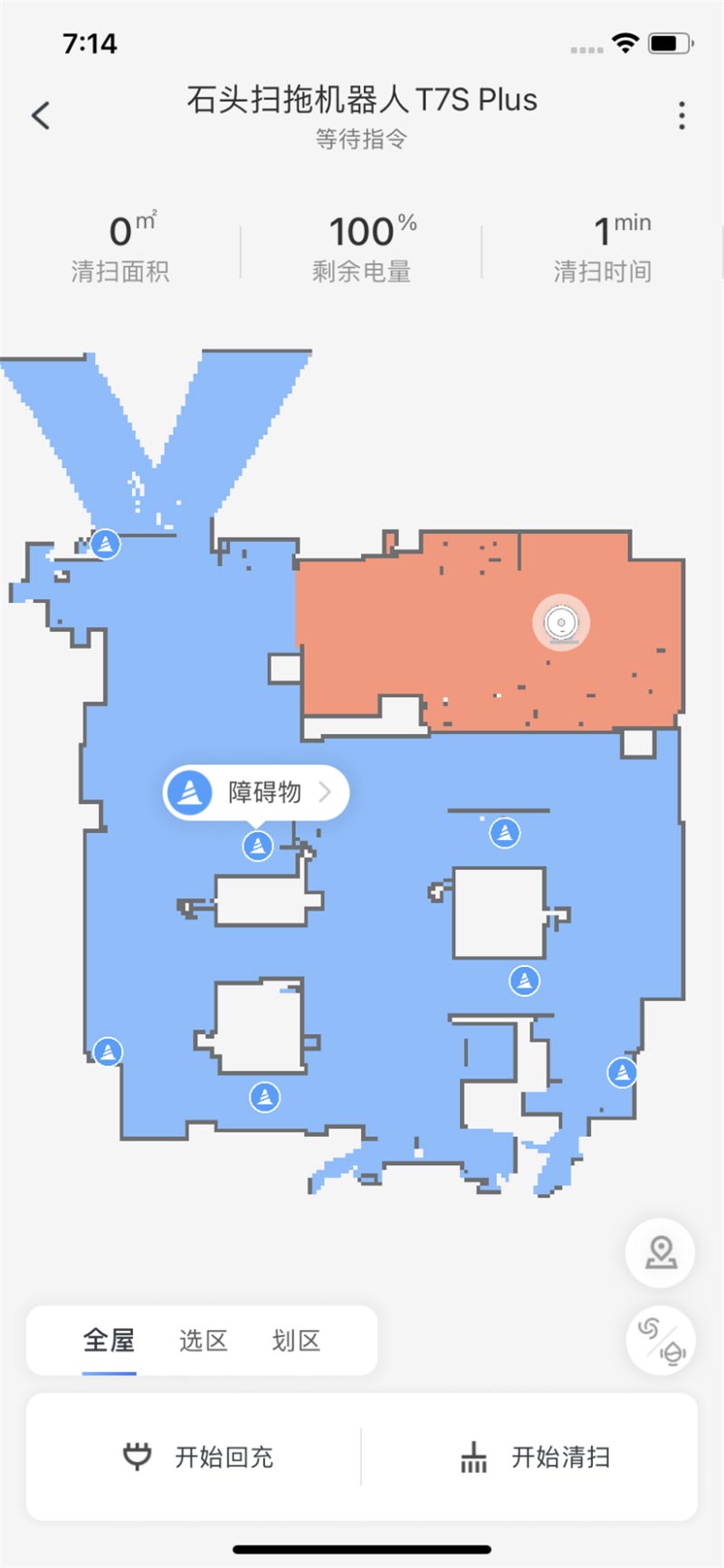
软件算法方面,石头扫拖机器人t7s plus升级到了全新的rr mason 8.0 3d算法,通过细化场景,增加测试案例,在路径规划中专为地毯和擦地场景进行专项优化。还支持百种泛物体识别避障,在检测到障碍物后,其还能结合lds采集到的地图信息,将障碍物对应位置标记在 app地图上。
在观察过扫拖机器人的行动路径之后,除了z字型清扫,t7s plus 还添加了全新的井字形扫拖,这是一种针对小区域的重点清洁,堪称“拉网式”清洁,减少遗漏。在手机app中点击「划区/选区」,清扫次数选择 2 次及以上,即可体验。
五、自动集尘充电座:无耗材自动集尘,有效减少清理频率
与石头扫拖机器人t7s plus一同到来的还有一款自动集尘充电座。
用户可以根据近期清扫状态等动态调整是否集尘及集尘持续时间,能有效避免经常倾倒垃圾,减少对扫地机的维护频率。

石头自动集尘充电座采用了多锥气旋分离技术,在“二级9锥气旋科技”的基础上,升级打造“15锥气旋科技”,在自动集尘充电座进行集尘工作时,集尘盒中的灰尘会在风道的作用下围绕滤芯旋转,这是因为灰尘的密度要比空气大很多并在离心力的作用下沉降,从而与空气分离。这就是多锥气旋分离的作用所在,高效分离无损耗,可以最大限度的避免灰尘阻塞滤网,并且获得了德国莱茵吸力无损耗认证。

集尘桶在吸入灰尘之后将多余的空气传送到另一侧的过滤桶中,借助尘袋/气旋、前置滤网、h13级hepa 滤网的三重分离过滤系统将一些细微的颗粒物污染源进行二级过滤,保证排出的空气洁净,整机过滤效率可以达到99.7%,然后用户只需要提起尘桶将收集来的垃圾尘土倾倒而出。
同时,石头自动集尘座还贴心支持气旋桶和一次性尘袋两种集尘方式,满足多样化产品使用体验。
需要注意的是,使用自动集尘充电座需要更换专用尘盒,并需要打开尘盒仓右侧的集尘进风口侧盖,确保进风通畅。
六、总结:从“扫地”到“扫拖”的全面升级
从“扫地机器人”到“扫拖机器人”,石头扫拖机器人t7s plus的升级极具诚意,并且内外变化颇多。
首先是外观方面,此作整体外形轮廓未有变化,一样的上面板有经典的塔状凸起,一样的扁平圆形机身,一样的配色风格,但是细节方面多了颇多的精致打磨,比如纹理点缀、比如弧形rgb灯带,让作为石头扫地机器人老用户的笔者眼前一亮。
石头扫拖机器人t7s plus的升级最多之处还是集中在内部以及实际的使用体验。
t7s plus回归用户对拖地的清洁需求,解决扫地机器人以往对顽固污渍清洁效果不佳的问题,支持升降拖布、震动擦地以及电控出水功能,这也让其成为了目前市面上唯一一款具备声波震动擦地和智能升降擦地系统的扫拖机器人,同时也针对性地解决了脏拖布带来二次污染、湿拖布长期贴着地面容易泡坏地板等痛点。
在经历了早年lds激光导航避障为主的方案到lds激光雷达+双目方案之后,此代的石头扫拖机器人t7s plus应用了ai结构光reactive 3d避障,同时还融合了打磨数代的lds激光测距、超声波地毯识别、高精度沿墙传感器等多传感器数据结合ai算法,在家居环境当中采取正确的避障策略,智能判断是避障还是穿越,规避因为过度避障而导致的漏扫问题。
在测试过程当中,基于这套主动测距的方案,石头扫拖机器人t7s plus对于日常生活当中的常见障碍物,在传感器扫描探测后能够配合避障算法确定不同的避障距离,甚至对于沙发和床容易卡住扫地机器人的家具,其也能通过3d结构光进行高度测量辅助,实用意义颇大。

软件算法方面,石头扫拖机器人t7s plus升级到了全新的rr mason 8.0 3d算法,已经支持百种泛物体识别避障,全新的井字形扫拖带来了过去没有过的体验,“拉网式”清洁效果更佳。
石头首款自动集尘充电座的加入让“懒人生活”进行到底——石头扫拖机器人t7s plus在完成清扫工作回充后,可以自动集尘,15锥气旋所产生强大的离心力有效分离灰尘和空气,借助尘袋/气旋、前置滤网、hepa滤网的三重分离过滤系统进行二级过滤,用户需要做的只有等尘桶满了将之倾倒而出即可。
价格方面,石头扫拖机器人t7s plus在预售阶段能够以2799元的价格拿下,如果想要解锁“懒人完全体”的体验需要另1899元拿下自动集尘充电座。目前石头自动集尘充电座不能单独购买,需要跟扫拖机器人组合。对于想要将“懒人生活”进行到底、不再打理扫地机器人的极致用户而言,相当值得体验一番。
以上就是石头t7splus石头评测,希望大家喜欢,请继续关注代码网。

发表评论